电控临时提升控制方法、控制器及拖拉机与流程
本发明涉及拖拉机控制,具体涉及一种电控临时提升控制方法、控制器及拖拉机。
背景技术:
1、当前智能化拖拉机装备的电控提升,通常配备角度传感器、力传感器,多功能提升器等,其具备力调节、位调节、力位综合调节等功能,在设置好耕深后,力传感器根据负载判断提升器需要的补偿值,进而控制提升器高度的调整,该种装备通常应用于犁耕作业等;在一些作业场景中,如水田中,由于作物秸秆的堆积或犁耕时突然出现小块土质变硬,如果提升系统未装备力传感器,那么驾驶员将不得不调整耕作深度,并在越过这些障碍后为了保证作业质量而再次调整到之前的作业深度,整个过程操作起来较为繁琐,且作业反应较慢;因此并不能满足临时提升作业的灵活需求。
2、在实现电控提升功能的机械拖拉机上,具备耕深调节功能,但考虑到成本等问题,一般不具备力调节等方式实现自动化耕深调节,因此单纯的耕深调节一旦受地形或阻力影响即需要重新设置耕深,耕深调节频繁,影响作业效率及作业质量。
技术实现思路
1、针对现有技术的缺陷,本发明的目的在于提出一种临时提升控制方法,以及相应的控制器及拖拉机,以满足不同地况条件下的临时提升需求。
2、为了达到上述目的,本发明所采用的技术方案是:
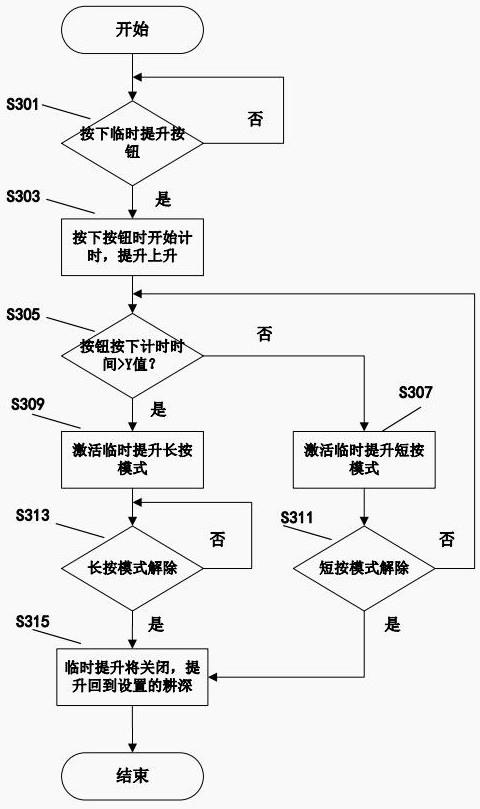
3、一种电控临时提升控制方法,当拖拉机在田间进行作业时,通过测速装置实时采集拖拉机实际行驶速度,驾驶员通过作业地况及拖拉机阻力状态,判断提升器附带的机具需要临时抬起时,通过触发临时提升按钮使拖拉机进入临时提升模式,提升器升高将机具抬起一定高度,并在临时提升模式关闭后恢复到之前的提升高度。
4、进一步地,所述电控临时提升按钮为自复位按钮,所述临时提升模式分为长按模式和短按模式:当按下临时提升按钮在设定时间内松开,则为短按模式;当按下临时提升按钮超过设定时间时,则为长按模式;临时提升短按模式或长按模式关闭后,提升自动下降到之前的作业的耕深。
5、进一步地,在临时提升长按模式下,提升器在临时提升按钮松开后仍保持当前提升状态,当再次短按临时提升按钮时,临时提升长按模式关闭,提升器恢复到之前值。
6、进一步地,临时提升短按模式在激活后,通过以下方式使其关闭:设置一段时间,在触发临时提升按钮进入短按模式并松开临时提升按钮时开始计时,计时大于设置的一段时间时,自动关闭临时提升短按模式,该“一段时间”通过标定产生;当未标定时,默认触发临时提升按钮进入短按模式后,再松开临时提升按钮时,临时提升短按模式即关闭。
7、进一步地,所述设置的“一段时间”通过如下方式标定:拖拉机控制系统上电,不启动发动机,在2秒内连续按下临时提升按钮3次,此时仪表灯会显示临时提升时间设置灯亮,在该灯亮后,与再次按下临时提升按钮之间的时间,作为临时提升短按模式保持提升状态的时间。
8、进一步地,当触发临时提升按钮时,通过测速装置计算需要临时提升的提升高度;当未配备测速装置时,通过当前提升值的百分比计算临时提升的提升高度。
9、进一步地,通过测速装置计算需要临时提升的提升高度的方法具体为,拖拉机上的测速装置实时检测拖拉机行驶速度,当驾驶员按下临时提升按钮时,控制算法会根据此时前3秒车速的下降值预测此时提升提高的值。
10、一种控制器,所述控制器用于执行上述的电控临时提升控制方法。
11、一种拖拉机,所述拖拉机包括所述的控制器。
12、有益效果:本发明的控制方法,当驾驶员观察到地形情况或拖拉机状态时,根据需要操作自复位的临时提升按钮,按下临时提升按钮时,提升器会上升。短按后松开临时提升按钮,,一段时间自动下降到之前的耕深。长按临时提升按钮超过设定时间后,临时提升继续保持当前高度,当驾驶员松开临时提升按钮,并再次按下临时提升按钮时,提升下降恢复到之前的作业耕深。临时提升保持时间可设置、临时提升的高度可自动换算也可根据当前提升高度的百分比计算。
13、本发明的控制方法对于具有单一位调节功能的电控提升的拖拉机而言,能灵活响应驾驶员对提升的临时动作需要,操作简单;满足作业时对于耕深变化需要临时提升的需求,对于水田、旋耕、犁耕作业等工况,具有成本小、反应快、应用灵活的优点,切实满足拖拉机带机具作业的需求。
技术特征:
1.一种电控临时提升控制方法,其特征在于,当拖拉机在田间进行作业时,通过测速装置实时采集拖拉机实际行驶速度,驾驶员通过作业地况及拖拉机阻力状态,判断提升器附带的机具需要临时抬起时,通过触发临时提升按钮使拖拉机进入临时提升模式,提升器升高将机具抬起一定高度,并在临时提升模式关闭后恢复到之前的提升高度。
2.根据权利要求1所述的一种电控临时提升控制方法,其特征在于,所述电控临时提升按钮为自复位按钮,所述临时提升模式分为长按模式和短按模式:当按下临时提升按钮在设定时间内松开,则为短按模式;当按下临时提升按钮超过设定时间时,则为长按模式;临时提升短按模式或长按模式关闭后,提升自动下降到之前的作业的耕深。
3.如权利要求2所述的一种电控临时提升控制方法,其特征在于,在临时提升长按模式下,提升器在临时提升按钮松开后仍保持当前提升状态,当再次短按临时提升按钮时,临时提升长按模式关闭,提升器恢复到之前值。
4.根据权利要求2所述的一种电控临时提升控制方法,其特征在于,临时提升短按模式在激活后,通过以下方式使其关闭:设置一段时间,在触发临时提升按钮进入短按模式并松开临时提升按钮时开始计时,计时大于设置的一段时间时,自动关闭临时提升短按模式,该“一段时间”通过标定产生;当未标定时,默认触发临时提升按钮进入短按模式后,再松开临时提升按钮时,临时提升短按模式即关闭。
5.如权利要求4所述的一种电控临时提升控制方法,其特征在于,所述设置的“一段时间”通过如下方式标定:拖拉机控制系统上电,不启动发动机,在2秒内连续按下临时提升按钮3次,此时仪表灯会显示临时提升时间设置灯亮,在该灯亮后,与再次按下临时提升按钮之间的时间,作为临时提升短按模式保持提升状态的时间。
6.根据权利要求1所述的一种电控临时提升控制方法,其特征在于,当触发临时提升按钮时,通过测速装置计算需要临时提升的提升高度;当未配备测速装置时,通过当前提升值的百分比计算临时提升的提升高度。
7.根据权利要求6所述的一种电控临时提升控制方法,其特征在于,通过测速装置计算需要临时提升的提升高度的方法具体为,拖拉机上的测速装置实时检测拖拉机行驶速度,当驾驶员按下临时提升按钮时,控制算法会根据此时前3秒车速的下降值预测此时提升提高的值。
8.一种控制器,其特征在于,所述控制器用于执行权利要求1-7任一项所述的电控临时提升控制方法。
9.一种拖拉机,其特征在于,所述拖拉机包括权利要求8所述的控制器。
技术总结
本发明涉及一种电控临时提升控制方法、控制器及拖拉机,在拖拉机设置好耕作深度进行作业时,由于阻力及地形的变化,导致驾驶员需要临时通过提升器对耕深进行调节,通过触发临时提升按钮,使提升快速自动上升并在一定时机自动下降到之前设定的耕深,临时提升上升的高度可由测速装置或算法获得,临时提升模式通过驾驶员触发按钮的时间及方式确定,该控制方式可有效减少对作业耕深的频繁调节和作业质量的变化,使作业时操作提升的灵活性增加。
技术研发人员:冯春凌,付世玉,王建华,付田志,周俊卫,吴利谦,王永,张钏钏,王梦华,刘豫昆,刘伊滨,俞道云
受保护的技术使用者:第一拖拉机股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!