免少耕播种机秸秆堵塞情况监测、报警及破除方法及系统
本发明属于农业机械,特别涉及一种免少耕播种机秸秆堵塞情况监测、报警及破除方法及系统。
背景技术:
1、西北旱作一熟区玉米免少耕播种前地表覆盖大量前茬秸秆,作业时极易发生缠绕堵塞现象,影响作业效率,降低播种质量。针对此问题,国内外已研发了一系列免少耕播种防堵装置,显著提高了播种机通过性。然而,由于不同地块秸秆覆盖量、含水率、土壤含水率等存在差异,不同类型播种机防堵性能也有所差别,现有防堵装置无法对不同秸秆堵塞状况进行识别监测,也无法对应进行实时调整,可能造成特殊情况下堵塞或者功耗浪费。
2、目前,已有的防堵装置如专利号zl200320129940.8“用于小麦免耕播种机的防堵装置”,其为驱动式防堵装置,主要应用于华北一年两熟区秸秆量大的地区,可有效提高播种机通过性,然而防堵装置研究以纯机械结构研究为主,驾驶人员无法获得堵塞程度信息,且无法根据堵塞情况进行动态调整。
3、因此如何提供一种能够根据免少耕播种机秸秆堵塞状况进行识别、监测、报警,并实时控制调整达到防堵目的的装置是本领域技术人员亟需解决的问题。
技术实现思路
1、针对上述技术问题,本发明的目的是提供一种免少耕播种机秸秆堵塞情况监测、报警及破除方法及系统,可实时监测开沟器周围秸秆堵塞程度并通过信号灯提示和报警,并由单片机控制执行装置实时调整旋耕刀轴的转速从而破除堵塞。
2、为了实现上述目的,本发明提供了如下技术方案:
3、一种免少耕播种机秸秆堵塞情况监测、报警及破除方法,包括如下步骤:
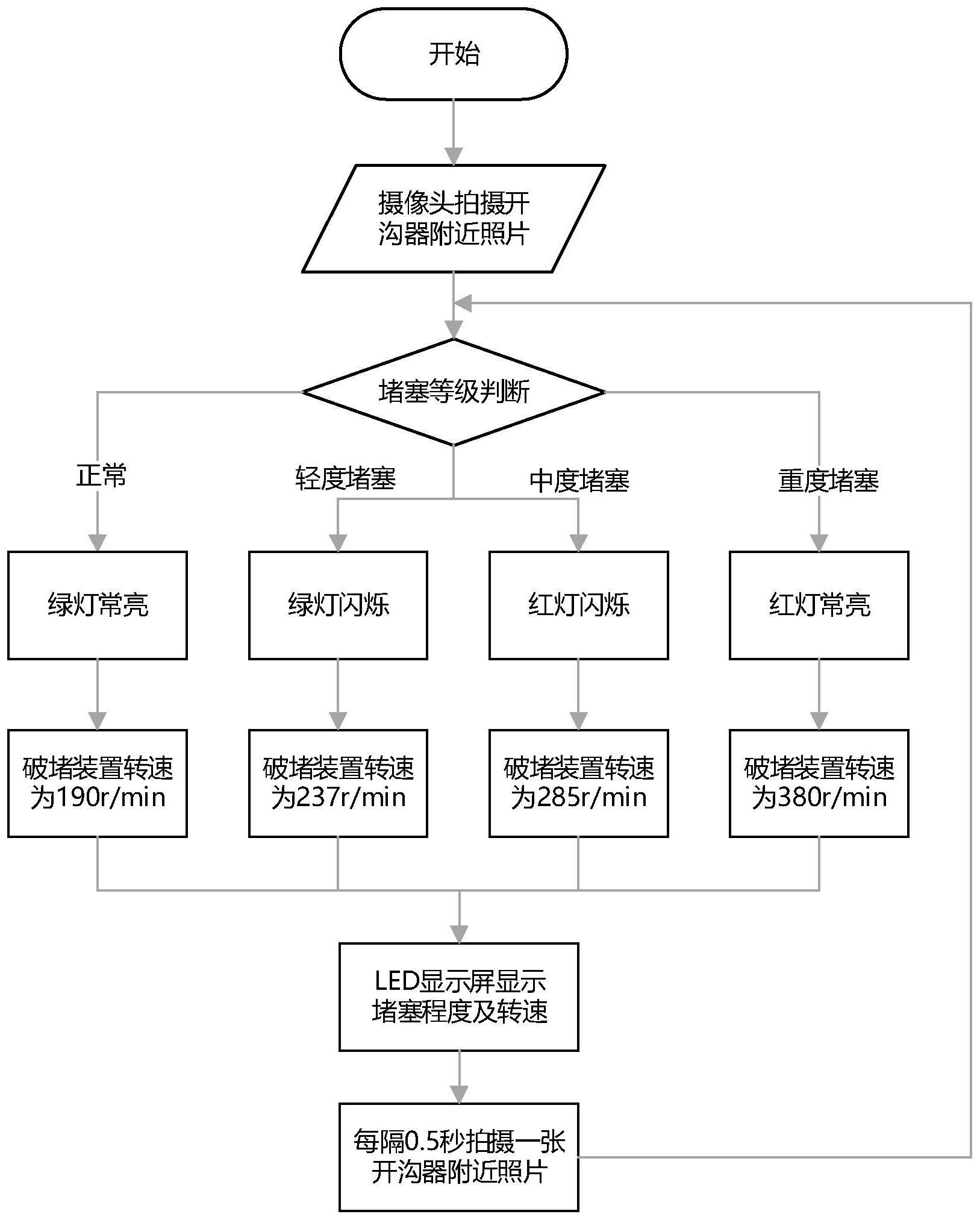
4、s1、作业前,提前收集一定数量开沟器处不同秸秆堵塞程度的图像,在python环境下利用labelimg软件对图像中的秸秆进行标注,将标注好的图像文件利用yolov5深度学习,根据矩形面积的大小将秸秆堵塞程度分为四种:当秸秆面积≤25%图像总面积时为正常状态;当25%图像总面积<秸秆面积≤50%图像总面积时为轻度堵塞状态;当50%图像总面积<秸秆面积<75%图像总面积时为中度堵塞状态;当75%图像总面积≤秸秆面积时为重度堵塞状态;训练完成后在python环境下将训练好的模型导入摄像头;
5、s2、作业时,免少耕播种机随拖拉机前进进行播种作业,摄像头将实时拍摄的开沟器正面全部区域图像输入步骤s1训练好的模型中,获得实时秸秆堵塞程度,并发送至控制面板的主控芯片;
6、s3、控制面板的主控芯片根据实时秸秆堵塞程度信号发出报警信号并确定旋耕刀轴的期望转速,根据旋耕刀轴的期望转速计算获得直流电机的转速,并发出相应的控制直流电机转速的pwm信号,使旋耕刀轴达到期望转速,从而完成防堵作业。
7、所述步骤s1中,在图像标注前,对图像进行二值分割、高斯滤波、彩色空间距离化和裁剪处理,裁剪后的图像的分辨率为160px×120px。
8、所述步骤s1中,利用findcontours()函数标注图像中秸秆的主体轮廓,对图像中所有秸秆的主体轮廓内面积进行累加求和后,除以图像总面积得到秸秆面积占图像总面积的百分比。
9、所述步骤s1中,所述图像为单通道,图像的数据类型为8uc1。
10、所述步骤s2中,控制面板向显示屏传输直流电机的实时转速和秸秆堵塞情况。
11、所述步骤s3中,控制面板的主控芯片将确定旋耕刀轴的期望转速所对应的直流电机的转速与转速传感器采集的直流电机的实际转速进行比较,通过pid控制,输出的pwm值与当前误差、历史总误差、当前误差与上一次误差的差值各乘以固定系数后得出。
12、一种利用所述的方法的免少耕播种机秸秆堵塞情况监测、报警及破除系统,应用于免少耕播种机上,所述免少耕播种机包括直流电机1、传动链2、旋耕刀组4、旋耕刀轴5、开沟器7和机架11。
13、所述直流电机1固定于机架11的上部;所述旋耕刀轴5水平设置在机架11的中部下方;多组旋耕刀组4固接在旋耕刀轴5的圆周面上;直流电机1的动力输出轴上设有主动链轮,旋耕刀轴5上设有从动链轮,传动链2套设在所述主动链轮和从动链轮之间,所述传动链2将直流电机1的动力传输至旋耕刀轴5;所述开沟器7固接在机架11的后部,位于旋耕刀组4的后方。
14、所述免少耕播种机秸秆堵塞情况监测、报警及破除系统进一步包括摄像头3、蓄电池6、控制面板8、显示屏9和转速传感器10;其中,
15、所述控制面板8和显示屏9固定于机架11上。
16、所述蓄电池6分别与直流电机1、摄像头3、控制面板8和显示屏9连接。
17、所述转速传感器10安装在直流电机1的动力输出轴上,用于实时检测直流电机1的转速,转速传感器10的转速信号由传输线发送至控制面板8的主控芯片。
18、所述摄像头3固定安装在机架11的前端中间位置,摄像头的视野内包含开沟器7正面全部区域,使得摄像头3能够实时检测开沟器7前秸秆堵塞程度,并发送至控制面板8的主控芯片。
19、所述摄像头3采用openmv摄像头,包括stm32单片机和python解释器,用于识别秸秆堵塞程度;openmv摄像头每间隔0.5s进行一次图像采采集。
20、所述控制面板8的主控芯片与显示屏9和直流电机1连接,向显示屏9传输直流电机1的实时转速和秸秆堵塞情况,控制直流电机1的输出转速。
21、所述控制面板8上设有多个报警信号灯和控制按钮;其中,报警信号灯用于显示秸秆堵塞等级;控制按钮包括启动按钮、关闭按钮、紧急制动按钮、自检按钮和四个固定转速按钮。
22、与现有技术相比,本发明的有益效果在于:
23、(1)提前训练,控制器对摄像头实时采集的开沟器处秸秆照片进行处理分析,判定堵塞程度;
24、(2)堵塞程度信号经由中央控制器传输到显示屏,通过信号灯不同颜色组合体现,使驾驶员实时掌握作业情况;
25、(3)根据堵塞程度自动调节转速,堵塞程度轻时降低转速,堵塞程度重时提高转速,进行高效防堵作业。
技术特征:
1.一种免少耕播种机秸秆堵塞情况监测、报警及破除方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的免少耕播种机秸秆堵塞情况监测、报警及破除方法,其特征在于,所述步骤s1中,在图像标注前,对图像进行二值分割、高斯滤波、彩色空间距离化和裁剪处理,裁剪后的图像的分辨率为160px×120px。
3.根据权利要求1所述的免少耕播种机秸秆堵塞情况监测、报警及破除方法,其特征在于,所述步骤s1中,利用findcontours()函数标注图像中秸秆的主体轮廓,对图像中所有秸秆的主体轮廓内面积进行累加求和后,除以图像总面积得到秸秆面积占图像总面积的百分比。
4.根据权利要求1所述的免少耕播种机秸秆堵塞情况监测、报警及破除方法,其特征在于,所述步骤s1中,所述图像为单通道,图像的数据类型为8uc1。
5.根据权利要求1所述的免少耕播种机秸秆堵塞情况监测、报警及破除方法,其特征在于,所述步骤s2中,控制面板向显示屏传输直流电机的实时转速和秸秆堵塞情况。
6.根据权利要求1所述的免少耕播种机秸秆堵塞情况监测、报警及破除方法,其特征在于,所述步骤s3中,控制面板的主控芯片将确定旋耕刀轴的期望转速所对应的直流电机的转速与转速传感器采集的直流电机的实际转速进行比较,通过pid控制,输出的pwm值与当前误差、历史总误差、当前误差与上一次误差的差值各乘以固定系数后得出。
7.一种利用如权利要求1-6任一项所述的方法的免少耕播种机秸秆堵塞情况监测、报警及破除系统,应用于免少耕播种机上,所述免少耕播种机包括直流电机(1)、传动链(2)、旋耕刀组(4)、旋耕刀轴(5)、开沟器(7)和机架(11);
8.根据权利要求7所述的免少耕播种机秸秆堵塞情况监测、报警及破除系统,其特征在于,所述控制面板(8)上设有多个报警信号灯和控制按钮;其中,报警信号灯用于显示秸秆堵塞等级;控制按钮包括启动按钮、关闭按钮、紧急制动按钮、自检按钮和四个固定转速按钮。
技术总结
本发明涉及一种免少耕播种机秸秆堵塞情况监测、报警及破除方法及系统,所述方法包括:S1、作业前,提前收集一定数量开沟器处不同秸秆堵塞程度的图像,在python环境下利用labelimg软件对图像中的秸秆进行标注,将标注好的图像文件利用yolov5深度学习,根据矩形面积的大小划分秸秆堵塞程度;S2、作业时,摄像头将实时拍摄的开沟器正面全部区域图像输入步骤S1训练好的模型中,获得实时秸秆堵塞程度,并发送至控制面板的主控芯片;S3、控制面板的主控芯片根据实时秸秆堵塞程度信号发出报警信号并确定旋耕刀轴的期望转速,根据旋耕刀轴的期望转速计算获得直流电机的转速,并发出相应的控制直流电机转速的PWM信号,使旋耕刀轴达到期望转速,从而完成防堵作业。
技术研发人员:赵宏波,王毓彬,张义哲,杨然,段乃炜,郑智旗,黄玉祥,刘正道,姚俊祥
受保护的技术使用者:西北农林科技大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!