全自动的树苗种植机器人及种植方法
本申请涉及机器人,尤其涉及一种全自动的树苗种植机器人及种植方法。
背景技术:
1、种植机器人是一种可在户外运行,携带有一种或多种传感器,在遥控操纵或计算机控制下能在极其恶劣的环境中进行一系列管道作业的机电仪一体化系统。种植机器人的功能针对性较强,目前国内外针对自身的地形与农业类型发展出了各种针对粮食经济作物的种植机器人,并已广泛运用。但对针对林业的种植机器人的研究并不深入,现有针对林业的种植机器人主要集中于大型人工操作设备,外观与工程设备类似,采用挖掘机类似的液压臂配合对应的大型功能机构,通过人工现场操作实现树苗种植功能。虽然该种设备能在很大程度上适应户外作业环境,但其体积大,能耗高,且需要人工现场操作,无法适应我国的复杂地形环境和日益提高的人工成本。而在小型林业的种植机器人方面,现有设备功能较为单一,单机体只能实现挖穴、栽植等功能,并不能结合所栽植树苗的特定树苗种植技术,无法实现选址、整地、挖穴、栽植、浇水、管护这一套科学的树苗种植。
技术实现思路
1、鉴于此,本申请实施例提供一种全自动的树苗种植机器人。
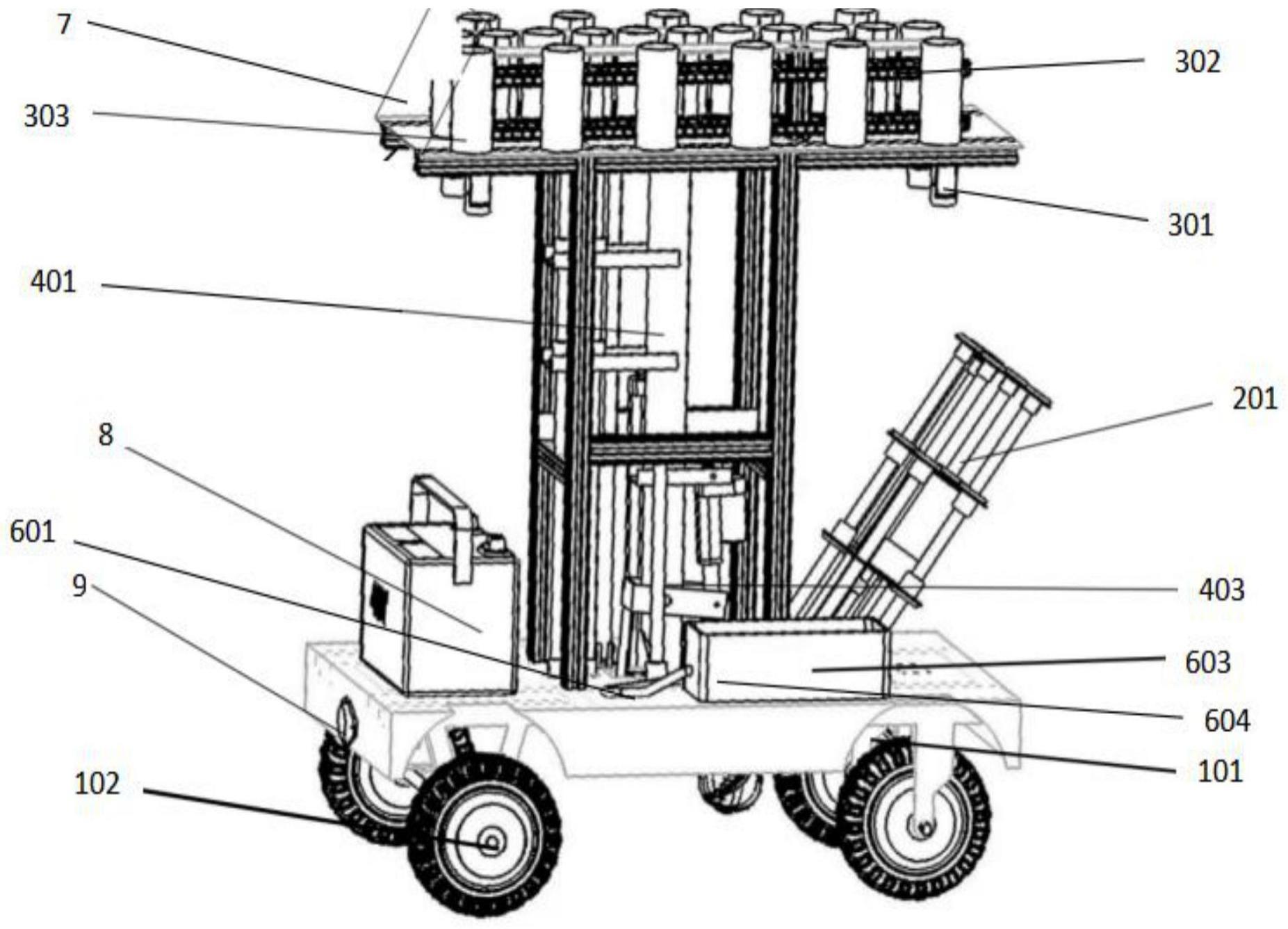
2、根据本申请实施例的第一方面,提供一种全自动的树苗种植机器人,包括:
3、行进机构,用于提供行走;
4、松土挖穴机构,所述松土挖穴机构包括第一伸缩机构、电机和钻头,所述电机搭载在所述第一伸缩机构上,所述钻头通过所述电机驱动转动;
5、树苗输送机构,所述树苗输送机构搭载在所述行进机构上,用于输送树苗;
6、树苗种植机构,用于将输送来的树苗种植到挖好的穴中,所述树苗种植机构包括第二伸缩机构、树苗导向管、第三伸缩机构、连接片、拨片,所述第二伸缩机构的一端固定在所述行走机构上,所述树苗导向管固定在所述第二伸缩机构的另一端,所述连接片可转动地连接在所述树苗导向管上,所述第三伸缩机构的一端固定在所述树苗导向管上,另一端与所述连接片的一端交接,所述拨片固定在所述连接片的另一端;
7、下压覆土机构,所述下压覆土机构搭载在所述行进机构上,用于将种植在穴中的树苗覆盖泥土;
8、浇水机构,所述浇水机构搭载在所述行进机构上,用于对覆盖泥土后的树苗进行浇水。
9、可选的,所述第一伸缩机构包括第一电动推杆、第一导杆和第一滑台,所述第一滑台套设在所述第一导杆上,所述第一电动推杆的驱动端驱动所述第一滑台沿所述第一导杆滑动,所述电机固定在所述第一滑台上,所述第一电动推杆和第一导杆均固定在所述行进机构上。
10、可选的,所述钻头包括螺旋钻头与罩在所述螺旋钻头外的若干松土拨片。
11、可选的,所述树苗输送机构包括输送电机、一对链轮链接和树苗存储桶,所述输送电机驱动其中一个链轮转动,所述链条套装在一对链轮上,所述带动树苗存储桶固定在所述链条的外侧。
12、可选的,所述第二伸缩机构包括大行程电动推杆、第二导杆、第二滑台,所述大行程电动推杆的一端和所述第二导杆均固定在所述行进机构上,所述第二滑台套设在所述第二导杆上,所述大行程电动推杆的另一端固定在所述第二滑台上,驱动所述第二滑台沿所述第二导杆上下滑动,所述树苗导向管固定在所述第二滑台上。
13、可选的,所述下压覆土机构包括电动推杆和覆土模块,所述电动推杆的一端固定在所述行进机构上,另一端与所述覆土模块固定连接。
14、可选的,所述浇水机构主要由蠕动泵、水箱、水管、湿度传感器,所述水箱固定于所述行进机构上,所述湿度传感器与所述下压覆土机构连接,所述湿度传感器用于检测土壤湿度,所述蠕动泵根据所述湿度传感器反馈的数据进行定量浇水。
15、可选的,还包括:太阳能板与蓄电池,所述太阳能板与蓄电池电连接,所述太阳能板固定在植树机器人上方,用于太阳能发电,所述蓄电池存储所述太阳能板发出的电,并为整个全自动的树苗种植机器人提供工作电压。
16、可选的,还包括:激光雷达、gps模块、opencv视觉模块和树莓派,其中:
17、所述激光雷达设置在行进机构前端,用于机器人采集前方环境数据,反馈至所述树莓派;
18、所述gps模组用于采集机器人的经纬度、地速、加速度,采集的信息发送至所述树莓派;
19、所述opencv视觉模块固定在松土挖坑机构下方,并且摄像头安装在两个360度舵机上,用于实时采集树苗的图像;
20、所述树莓派用于执行以下步骤:
21、接收所述opencv视觉模块采集到图像,对图像进行二值化、腐蚀膨胀、区域定位、图像分割操作,得到字符图片,将字符图片放入图像数据库内进行对比识别,以实现对树苗的生长状态检测,其中图像数据库通过以下方式获得:先利用训练数据,输入svm训练模型进行训练,然后将训练数据保存,得到图像数据库;
22、接收所述gps模组采集的机器人经纬度、地速、加速度,确定机器人的所在位置,设置目标位置的坐标,根据当前经纬度和目标经纬度解算出方向,并且发送数字信号给行进机构,以进行行走。
23、接收所述激光雷达采集的周围环境信息以及障碍物的信息,当激光雷达检测到前方存在障碍物时,控制机器人对前方障碍物进行规避并移动;
24、所述gps模块、所述激光雷达配合所述树莓派规划路线,并控制行进机构运动到达指定植树地点。
25、根据本申请实施例的第二方面,提供一种全自动的树苗种植机器人的种植方法,其特征在于,该方法在第一方面所述的装置中实现,该方法包括:
26、步骤1、所述行进机构运行到指定植树区域
27、步骤2、所述松土挖穴机构将下方的土壤进行翻松,同时形成一个小土坑;
28、步骤3、所述树苗输送机构将树苗输送至所述树苗种植机构内;
29、步骤4、所述树苗种植机构将储存的树苗种植到挖好的穴内;
30、步骤5、所述下压覆土机构将树苗周围土壤部分压实,同时形成树盘;
31、步骤6、所述浇水机构给树苗进行定量补水。
32、本申请的实施例提供的技术方案可以包括以下有益效果:
33、由上述实施例可知,本申请的所述行进机构用于提供行走;所述松土挖穴机构搭载在所述行进机构上,用于挖穴松土;所述树苗输送机构搭载在所述行进机构上,用于输送树苗;所述树苗种植机构搭载在所述行进机构上,用于将输送来的树苗种植到挖好的穴中;所述下压覆土机构搭载在所述行进机构上,用于将种植在穴中的树苗覆盖泥土;所述下压覆土机构搭载在所述行进机构上,用于对覆盖泥土后的树苗进行浇水。通过以上结构的设计,可以实现选址、整地、挖穴、栽植、浇水、管护这一套科学的树苗种植。
34、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种全自动的树苗种植机器人,其特征在于,包括:
2.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,所述第一伸缩机构包括第一电动推杆、第一导杆和第一滑台,所述第一滑台套设在所述第一导杆上,所述第一电动推杆的驱动端驱动所述第一滑台沿所述第一导杆滑动,所述电机固定在所述第一滑台上,所述第一电动推杆和第一导杆均固定在所述行进机构上。
3.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,所述钻头包括螺旋钻头与罩在所述螺旋钻头外的若干松土拨片。
4.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,所述树苗输送机构包括输送电机、一对链轮链接和树苗存储桶,所述输送电机驱动其中一个链轮转动,所述链条套装在一对链轮上,所述带动树苗存储桶固定在所述链条的外侧。
5.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,所述第二伸缩机构包括大行程电动推杆、第二导杆、第二滑台,所述大行程电动推杆的一端和所述第二导杆均固定在所述行进机构上,所述第二滑台套设在所述第二导杆上,所述大行程电动推杆的另一端固定在所述第二滑台上,驱动所述第二滑台沿所述第二导杆上下滑动,所述树苗导向管固定在所述第二滑台上。
6.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,所述下压覆土机构包括电动推杆和覆土模块,所述电动推杆的一端固定在所述行进机构上,另一端与所述覆土模块固定连接。
7.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,所述浇水机构主要由蠕动泵、水箱、水管、湿度传感器,所述水箱固定于所述行进机构上,所述湿度传感器与所述下压覆土机构连接,所述湿度传感器用于检测土壤湿度,所述蠕动泵根据所述湿度传感器反馈的数据进行定量浇水。
8.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,还包括:太阳能板与蓄电池,所述太阳能板与蓄电池电连接,所述太阳能板固定在植树机器人上方,用于太阳能发电,所述蓄电池存储所述太阳能板发出的电,并为整个全自动的树苗种植机器人提供工作电压。
9.根据权利要求1所述的一种全自动的树苗种植机器人,其特征在于,还包括:激光雷达、gps模块、opencv视觉模块和树莓派,其中:
10.一种全自动的树苗种植机器人的种植方法,其特征在于,该方法在权利要求1-9任一项所述的装置中实现,该方法包括:
技术总结
本发明公开了一种全自动的树苗种植机器人,包括行进机构,用于提供行走;松土挖穴机构,所述松土挖穴机构包括第一伸缩机构、电机和钻头,所述电机搭载在所述第一伸缩机构上,所述钻头通过所述电机驱动转动;树苗输送机构,所述树苗输送机构搭载在所述行进机构上,用于输送树苗;树苗种植机构,用于将输送来的树苗种植到挖好的穴中;下压覆土机构,所述下压覆土机构搭载在所述行进机构上,用于将种植在穴中的树苗覆盖泥土;浇水机构,所述浇水机构搭载在所述行进机构上,用于对覆盖泥土后的树苗进行浇水。本发明结合选址、整地、挖穴、栽植、浇水、管护这一套科学的树苗种植,旨在实现多功能,高效率的树苗种植。
技术研发人员:赵华成,陈建能,徐高欢,刘政,胡诚,项伟城,钱海超
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!