一种笼养死亡肉鸡抓取系统及方法
本发明涉及笼养死亡肉鸡处理,具体为一种笼养死亡肉鸡抓取系统及方法。
背景技术:
1、随着我国养殖业的发展,养殖规模越来越大,养殖业的生产效益也受到越来越多的关注。
2、笼养肉鸡作为养殖业的重要品种,其死鸡抓取问题已经成为了制约养殖业发展的瓶颈。由于养殖密度大,养殖场数量多,养殖户散乱,养殖过程中死亡率也较高,传统抓捕方法效率低,劳动力成本高。传统抓捕方法多采用人工抓捕、网兜拖拉等方式,效率低,劳动力成本高,难以满足大规模养殖场的需求,针对上述问题,发明人提出一种笼养死亡肉鸡抓取系统及方法用于解决上述问题。
技术实现思路
1、为了解决打开封闭的鸡笼,将死亡肉鸡及时的抓出,同时避免其余的活鸡外逃,提升肉鸡养殖效率与安全性的问题;本发明的目的在于提供一种笼养死亡肉鸡抓取系统及方法。
2、为解决上述技术问题,本发明采用如下技术方案:一种笼养死亡肉鸡抓取系统,所述系统应用于笼养肉鸡养殖舍的移动装置,所述的笼养死亡肉鸡抓取系统包括:
3、设置的检测模块用于检测包括:死鸡相对于抓取装置的相对位置;鸡笼门与开门装置的距离;开门臂伸长长度;驱赶装置转动的角度;抓臂转动的角度、抓臂伸缩杆伸长长度、爪螺杆架转动角度、爪螺杆伸长长度、爪的自重、抓取的后总重;
4、设置的控制端的作用是控制包括:开门装置、驱赶装置、抓取装置,所述控制端与检测模块连接用于精准抓取死鸡;
5、所述控制模块配置为执行以下操作:
6、s101:获取检测模块的开门装置与鸡笼门的相对距离l,在l的值等于可开门距离值l时,控制端向开门装置发送开门信号,所述的开门装置伸缩杆伸长δl,使鸡笼门张开角度θ达到抓取装置可抓取角度θ1;
7、s102:根据所述驱赶装置驱赶端到鸡笼门的距离l4,驱赶装置获取当前驱赶装置角度θ2,θ3,输出驱赶装置角度θ4,θ5,检测模块获取当前驱赶装置角度为θ4,θ5以后,控制端向驱动电机发送pmw信号;
8、s103:所述抓取装置接收到控制端给定的死鸡固定相对位置(δx,δy,δz)以后,所述控制装置获取抓臂初始角度θ6,根据相对位置发送使抓臂转动到θ7的δθ信号,所述的控制端在获取检测模块获取抓臂转动到θ7后,所述控制端发送信号:抓臂伸缩杆伸长量l1、爪螺杆架转动角度θ8、爪螺杆伸长量l2;
9、s104:所述的控制端获取检测模块检测到爪从初始位置(x,y,z)到达抓取位置(x1,y1,z1)信号后,爪末端收紧以抓取死鸡,控制端发送信号使爪螺杆上升h,所述的控制端获取检测模块获取的抓取端自重和抓取重量w1,wi得到抓取系数,确定是否为抓取成功,所述控制端发送抓取装置收缩信号l2,使抓取装置将抓取的死鸡运送到收集装置;
10、s105:所述的控制端接收检测模块检测到收集装置抓取的死鸡数量增加后,发送信号使开门装置、驱赶装置回到初始角度和初始位置。
11、优选地,所述判断鸡笼开门是否达到可抓取角度的步骤,具体为:
12、a:检测系统获取鸡笼门和开门装置滑轮的相对距离l;
13、根据以下公式可计算可开门伸长的距离l:
14、
15、其中,d为开门端滚轮直径,l3为鸡笼门的宽度,当开门装置最大伸长长度l1作比较,当l1>l时控制端发送开门信号,相反的,控制端等待移动装置向鸡笼方向移动距离d2后再次判断鸡笼门是否可达到抓取角度。
16、优选地,所述控制端驱动驱赶装置到鸡笼门处的转动角度的计算模型如下:
17、
18、
19、其中,θ4为驱赶装置转动的角度,θ2为驱赶装置的初始角度,θ4为驱赶装置转动的角度,θ3为驱赶装置的初始角度,θ5为驱赶装置转动的角度,l4为驱赶装置驱赶端到鸡笼门的距离,l5为驱赶杆的长度。
20、优选地,所述的控制端控制爪移至死鸡固定位置抓取死鸡的具体步骤包括:
21、检测系统获取笼内死鸡数量;
22、检测系统获取抓取装置与死鸡固定位置的相对位置(δx,δy,δz);
23、根据相对位置,抓取装置根据如下公式得到抓取装置运动结果:
24、a:状态一
25、
26、
27、
28、
29、a:状态二
30、
31、
32、
33、
34、δθ为所述抓臂转动的角度,l1为所述抓取装置抓臂伸缩杆伸长长度,δθ1为爪螺杆架转动角度,l2为爪螺杆伸长长度;所述的状态一、状态二的判断依据由死鸡位置确定。
35、优选地,当所述的设置在死鸡抓取装置上的爪到达位置时收紧,爪收缩l2,爪根据抓取状态,停留n秒获取死鸡判别系数;
36、检测系统的称重装置获取抓取上升后的实时的爪自重w1、抓取的后总重wi、抓取成功系数抓取死鸡判别系数β;
37、所述的死鸡判别系数的计算模型如下:
38、
39、
40、当控制端获取的值高于的阈值时,判别为抓取动作完成,β的值高于阈值低于阈值(0.01—0.05)时,判别为抓取的死鸡,爪转动预设的角度,抓臂收缩l1并转动-δθ。
41、优选地,当抓取的死鸡判别系数高于0.05时,将抓取的鸡放回原位,再次从控制端获取新的死鸡抓取固定点以正确的抓取死鸡。
42、优选地,所述驱赶装置具体采用软棒向鸡笼内侧旋转。
43、优选地,所述死亡肉鸡抓取方法应用于笼养肉鸡养殖机器人,所述笼养肉鸡养殖机器人在鸡笼排的走廊中,位于鸡笼喂食侧,所述笼养肉鸡养殖机器人搭载死鸡抓取平台,所述平台设置有开门装置、驱赶装置、抓取装置,所述的笼养死亡肉鸡的抓取方法包括:
44、s201:在到达死鸡鸡笼后,根据所对应的位置参数获取鸡笼门的位置参数和尺寸参数,获取死鸡相对于抓取平台的位置参数;
45、s202:在根据鸡笼门的尺寸和位置,控制开门装置打开鸡笼门,所述的驱赶装置到达鸡笼门位置;
46、s203:抓取装置根据死鸡所在的固定位置,控制爪到固定抓取点,在抓取死鸡后,根据检测装置的数据判别是否抓取死鸡,并发出抓取成功的信号;
47、s204:根据所述的抓取成功的信号,控制爪,将死鸡运送到死鸡存放笼。
48、与现有技术相比,本发明的有益效果在于:
49、通过设置收集装置、开门装置、驱赶装置、抓取装置,控制端通过收集装置、开门装置、驱赶装置、抓取装置与检测模块用于精准抓取鸡笼中的死鸡,从而方便的实现了鸡笼内死亡肉鸡的及时抓取,同时,避免鸡笼内的活鸡外逃。
技术特征:
1.一种笼养死亡肉鸡抓取系统,其特征在于:所述系统应用于笼养肉鸡养殖舍的移动装置,所述的笼养死亡肉鸡抓取系统包括:
2.如权利要求1所述的一种笼养死亡肉鸡抓取系统,其特征在于,所述判断鸡笼(8)开门是否达到可抓取角度的步骤,具体为:
3.如权利要求1所述的一种笼养死亡肉鸡抓取系统,其特征在于,所述控制端(7)驱动驱赶装置(6)到鸡笼门(801)处的转动角度的计算模型如下:
4.如权利要求1所述的一种笼养死亡肉鸡抓取系统,其特征在于,所述的控制端(7)控制爪(505)移至死鸡固定位置抓取死鸡的具体步骤包括:
5.如权利要求4所述的一种笼养死亡肉鸡抓取系统,其特征在于,当所述的设置在死鸡抓取装置(5)上的爪(505)到达位置时收紧,爪(505)收缩l2,爪(505)根据抓取状态,停留n秒获取死鸡判别系数;
6.如权利要求4所述的一种笼养死亡肉鸡抓取系统,其特征在于,当抓取的死鸡判别系数高于0.05时,将抓取的鸡放回原位,再次从控制端(7)获取新的死鸡抓取固定点以正确的抓取死鸡。
7.如权利要求3所述的一种笼养死亡肉鸡抓取系统,其特征在于,所述驱赶装置(6)具体采用软棒向鸡笼(8)内侧旋转。
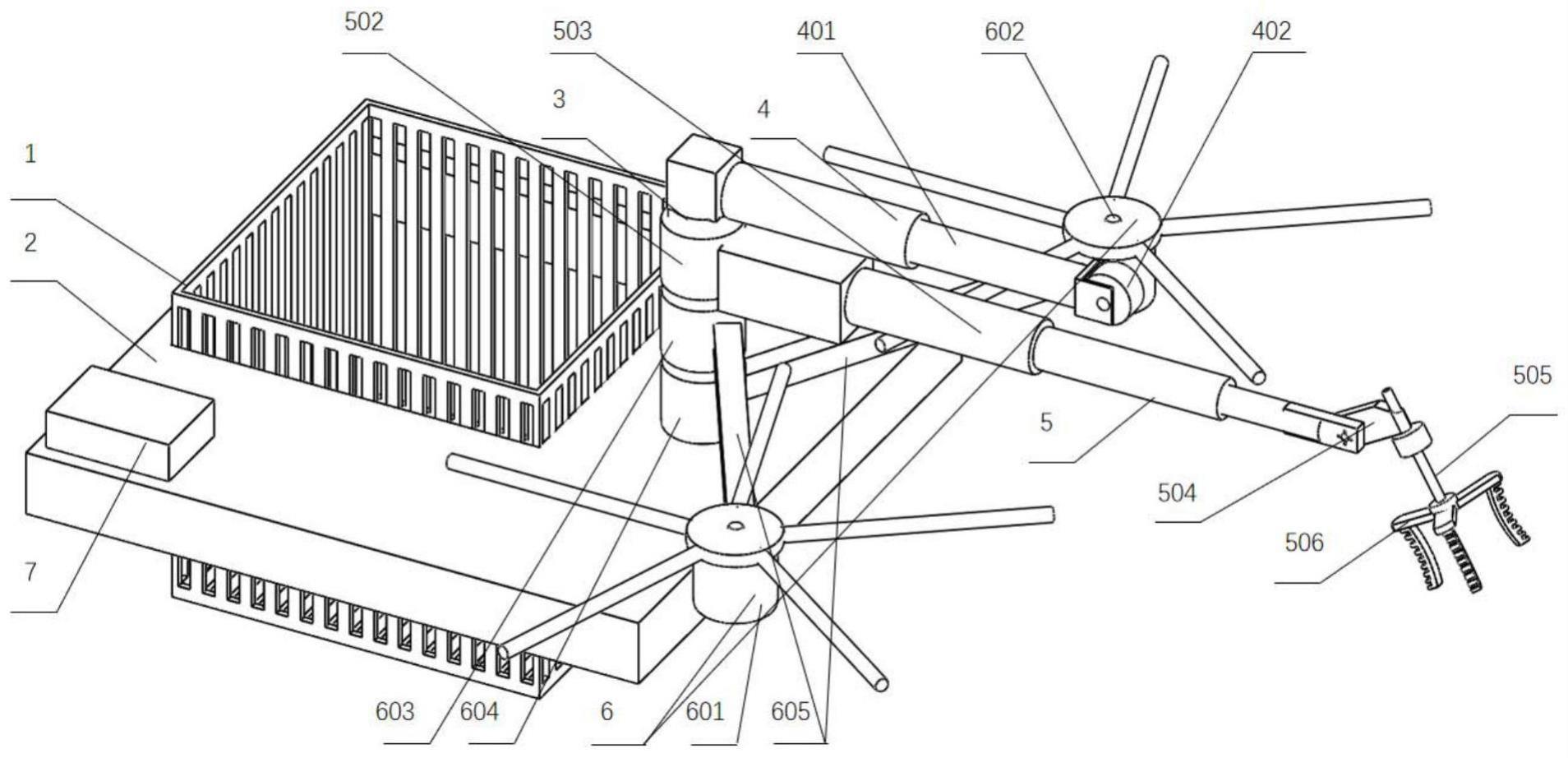
8.一种笼养死亡肉鸡抓取方法,其特征在于,所述死亡肉鸡抓取方法应用于笼养肉鸡养殖机器人,所述笼养肉鸡养殖机器人在鸡笼排的走廊中,位于鸡笼(8)喂食侧,所述笼养肉鸡养殖机器人搭载死鸡抓取平台,所述平台(2)设置有开门装置(4)、驱赶装置(6)、抓取装置(5),所述的笼养死亡肉鸡的抓取方法包括:
技术总结
本发明公开一种笼养死亡肉鸡抓取系统及方法,涉及笼养死亡肉鸡处理技术领域;而本发明包括设置的检测模块用于检测包括:死鸡相对于抓取装置的相对位置;鸡笼门与开门装置的距离;开门臂伸长长度;驱赶装置转动的角度;抓臂转动的角度、抓臂伸缩杆伸长长度、爪螺杆架转动角度、爪螺杆伸长长度、爪的自重、抓取的后总重;设置的控制端的作用是控制包括:开门装置、驱赶装置、抓取装置,控制端与检测模块连接用于精准抓取死鸡;通过设置收集装置、开门装置、驱赶装置、抓取装置,控制端通过收集装置、开门装置、驱赶装置、抓取装置与检测模块用于精准抓取鸡笼中的死鸡,从而方便的实现了鸡笼内死亡肉鸡的及时抓取,同时,避免鸡笼内的活鸡外逃。
技术研发人员:陈长喜,于新伟
受保护的技术使用者:天津农学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!