一种果蔬的砧木和穗苗贴接式嫁接方法
本发明涉及砧木与穗苗嫁接,具体为一种果蔬的砧木和穗苗贴接式嫁接方法。
背景技术:
1、嫁接就是将两个植株结合起来,使其形成一个整体,并且成为一颗植株,继续生长下去的一种新技术。在嫁接中,树干下面的部分一般会形成根系,叫做砧木,而上面的部分,一般形成树冠,叫做穗木或接穗,通过这种方式,来繁殖果蔬,就是果木嫁接。
2、现有的嫁接工艺,无论是贴接法、v型接法、舌接法都是采用人工进行嫁接以及后续手动维护,费时费工。由于砧目与穗苗(或接穗)个体直径差异,未来也难以机械化批量嫁接生产,同时机械自动化嫁接过程中,如何保证高精度与高成活率进行嫁接也是一大难题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种果蔬的砧木和穗苗贴接式嫁接方法,解决了现有嫁接技术中不便实现对果木维持高精度与高成活率的机械化自动嫁接的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于,包括以下步骤:
5、步骤1通过斜切的方式切割获取砧木与穗苗,在切割时使砧木和穗苗的切割面的面积差保持在1mm2的范围内,砧木和穗苗的切割面积在8mm2的范围内;
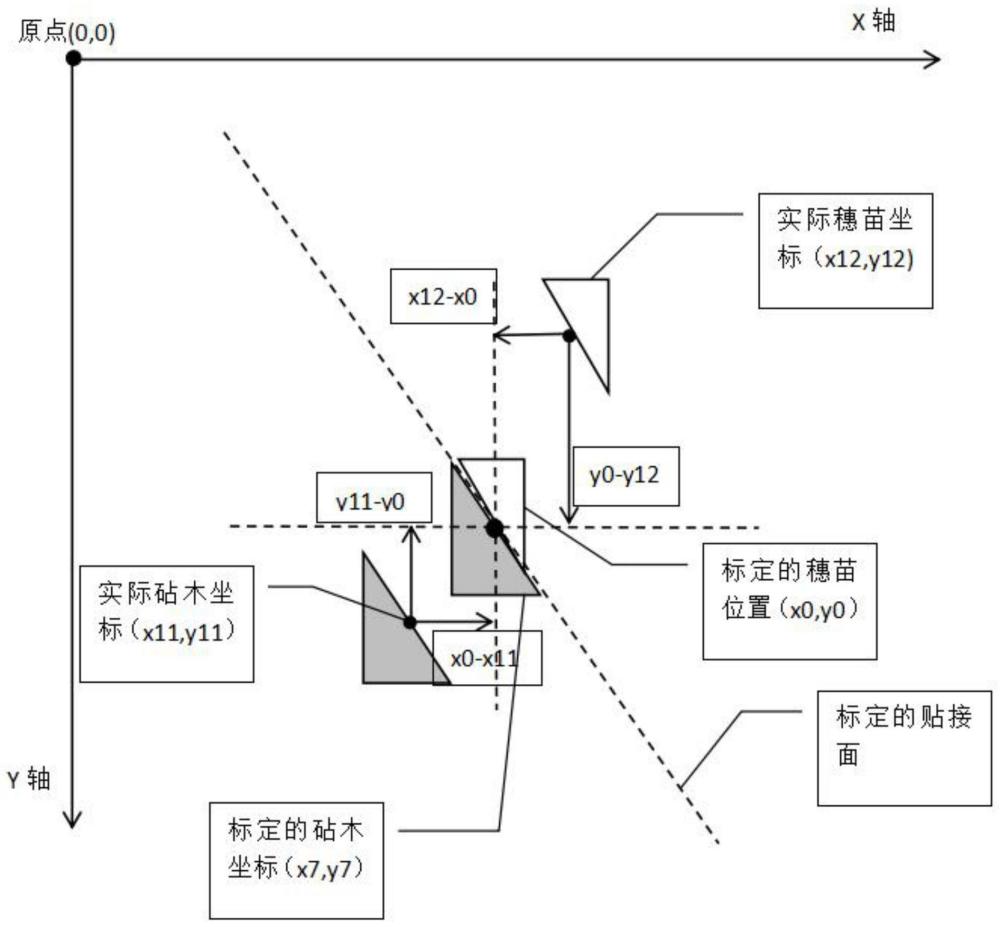
6、步骤2、采集砧木图像,经数据处理识别为算法图像,获得砧木上切割点、中间切割点、下切割点三个点在二维坐标轴上的x轴与y轴坐标;
7、步骤3、采集穗苗图像,经数据处理识别为算法图像,获得穗苗上切割点、中间切割点、下切割点三个点在二维坐标轴上的x轴与y轴坐标;
8、步骤4、结合标定的原点坐标系进行砧木和穗苗的贴接,砧木根据识别的上切割点、中间切割点、下切割点三个位置的二维坐标进行升降移动,穗苗根据识别的上切割点、中间切割点、下切割点三个位置进行前后运动,让砧木和穗苗贴接到一起;
9、步骤5、当砧木和穗苗贴接完成后,贴接位置进行包扎,使用嫁接夹将贴接位置进行固定获得嫁接后的成品苗。
10、优选的,所述步骤3中通过相机对穗苗的切割面进行侧边拍照识别。
11、优选的,所述步骤4中通过电机实现驱动砧木与穗苗的移动,所述步骤1-3中相机的精度控制在每个像素的精度≤0.05mm的范围内,电机的上下和伸缩移动精度在≤0.2mm的范围内。
12、优选的,所述相机型号为海康工业相机,拍摄精度在±0.01mm的精度范围内。
13、优选的,所述步骤4中在电机移动的中间位置进行标记点使用,将电机由起点往终点移动的死区误差和终点往起点移动的死区误差进行消除。
14、优选的,所述步骤1中相机进行拍照时对砧木和穗苗的胚轴宽度进行算法识别,保证对于砧木与穗苗的切割面积在8mm2,砧木与穗苗的切割角度计算方式如下:
15、
16、其中:胚轴的直径为d,切割角度为α,椭圆的面积公式为s。
17、优选的,所述砧木的茎粗在2.3~4.5mm,株高在30~80mm,穗苗的茎粗在2.3~4.5mm,株高在20~60mm。
18、(三)有益效果
19、本发明具备以下有益效果:
20、该果蔬的砧木和穗苗贴接式嫁接方法,通过对相机的拍摄精度和分辨率以及电机的移动精度进行控制,有效保证高精度,降低贴接误差,同时也通过对砧木和穗苗胚轴的宽度识别,保障砧木与穗苗的切割面面积差保持在1mm2的范围内,同时控制砧木和穗苗的切割面积在8mm2左右,从而保证最佳贴接效果,使得嫁接后成活率保持最佳。
技术特征:
1.一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于:所述步骤3中通过相机对穗苗的切割面进行侧边拍照识别。
3.根据权利要求1所述的一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于:所述步骤4中通过电机实现驱动砧木与穗苗的移动,步骤1-3中相机的精度控制在每个像素的精度≤0.05mm的范围内,电机的上下和伸缩移动精度在≤0.2mm的范围内。
4.根据权利要求3所述的一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于:所述相机型号为海康工业相机,拍摄精度在±0.01mm的精度范围内。
5.根据权利要求3所述的一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于:所述步骤4中在电机移动的中间位置进行标记点使用,将电机由起点往终点移动的死区误差和终点往起点移动的死区误差进行消除。
6.根据权利要求1所述的一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于:所述步骤1中相机进行拍照时对砧木和穗苗的胚轴宽度进行算法识别,保证对于砧木与穗苗的切割面积在8mm2,砧木与穗苗的切割角度计算方式如下:
7.根据权利要求6所述的一种果蔬的砧木和穗苗贴接式嫁接方法,其特征在于:所述砧木的茎粗在2.3~4.5mm,株高在30~80mm,穗苗的茎粗在2.3~4.5mm,株高在20~60mm。
技术总结
本发明涉及砧木与穗苗嫁接技术领域,公开了一种果蔬的砧木和穗苗贴接式嫁接方法,步骤1通过斜切的方式切割获取砧木与穗苗;步骤2、采集砧木图像,获得砧木上切割点、中间切割点、下切割点三个点在二维坐标轴上的X轴与Y轴坐标;步骤3、采集穗苗图像,获得穗苗上切割点、中间切割点、下切割点三个点在二维坐标轴上的X轴与Y轴坐标;步骤4、结合标定的原点坐标系进行砧木和穗苗的贴接;步骤5、当砧木和穗苗贴接完成后,贴接位置进行包扎。本发明,通过对于砧木与穗苗切割面积的控制,同时通过自动化送苗的方式,实现对于砧木与穗苗的高精度贴接,有效提高嫁接后成品苗的成活率。
技术研发人员:林茂先,蔡奎,王家胜,周飞,高春凤,冯国斌,杨程毅,刘军锋,王永山,张婷婷
受保护的技术使用者:青岛农业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!