一种智能灌溉系统及其灌溉方法与流程
本发明涉及智能灌溉,尤其涉及一种智能灌溉系统及其灌溉方法。
背景技术:
1、随着信息科技的发展,农业生产方式也随之产生变化,由以往的主要依靠人力的种植模式转变为依靠机械的种植模式,再向信息化自动化方向转变,在此过程中涌现了多种智能种植技术。例如:
2、cn201610106337.x公开了一种温室水肥气热一体化智能灌溉系统,该系统采用了清洁能源作为动力源,解决灌溉电力配套问题,经济环保,系统能耗低;采用plc控制器实现整个系统智能化控制,通过智能移动终端对整个自动化作业进行检测控制。
3、cn201510015309.2公开了手机远程智能灌溉系统,该智能灌溉系统包括网络数据处理器和智能手机,智能手机内设置安装有app智能灌溉软件,电磁阀控制器为无线电磁阀控制器,水流开关阀内设有水流触感器;电磁阀控制器根据设置自动开启工作,或通过智能手机中的app智能灌溉软件远程控制工作,从而水流感触器感触到水在流动的信号,启动水泵工作;电磁阀控制器并通过上述方式,以及水流感触器感触到水流几乎不流动自动关闭,水泵自动停止工作;从而通过上述过程实现末端的电磁阀控制器智能控制触发首部的智能变频控制柜工作。
4、cn201810183165.5公开了一种城市园林灌溉多点分/联式智能控制系统及实现方法,其包括中央控制器、网关模块、中心节点模块以及终端模块。其还提供一种城市园林灌溉多点分/联式智能控制的实现方法,通过计算机智能灌溉系统是通过自动气象站、土壤温湿度传感器,将与植物需水相关的气象参数和土壤参数如空气温湿度,降雨量,风力风向,土壤温湿度等通过网关模块传送到中央计算机,中央计算机通过相应的软件确定出所需的浇灌时间及灌水量,然后发出指令给相关设备实施灌溉的一种灌水方式。当灌溉按一定顺序完成后,系统自动停止浇灌,从而达到高度自动化。计算机控制灌溉系统可通过以太网的方式连接子系统,实施远程控制,从而实现多区域化的一点多控和三级控制技术,子系统包括网关、中心节点和终端节点。
5、综上可知,现有灌溉系统存在以下缺点:
6、1、部分需要现场铺设通信线缆和电源电缆,用于连接电动执行器和总控制器,铺设成本高,从而提高了种植成本,而部分无线控制方式只能控制阀门的开闭而不能控制阀门的开度。
7、2、由于需要依靠人的经验去设置灌溉量,故要求种植人员具备一定的种植经验以及系统操作经验,提高了对种植人员的要求,不符合当下种植人员的需求。
8、3、现有的灌溉机构大多采用阀门控制漫灌、滴灌或者喷灌的方式进行,其中漫灌浪费水资源;滴灌的滴水孔需要靠近植株设置,故只适用于种植密度较小的树木类浇灌,并不适用于种植密度较大的普通农作物如玉米、棉花、小麦等等;而喷灌的方式,存在不同位置灌溉量不均匀的现象,即越靠近喷灌头灌溉量越少,且上述滴灌或者喷灌在农田的设置均影响后续的自动化机械的采收工作,降低了种植效率。
技术实现思路
1、为解决上述问题,本发明提供一种智能灌溉系统及其灌溉方法,在控制阀门开闭的基础上,可进一步控制阀门的开度,实现了灌溉量的灵活调整。
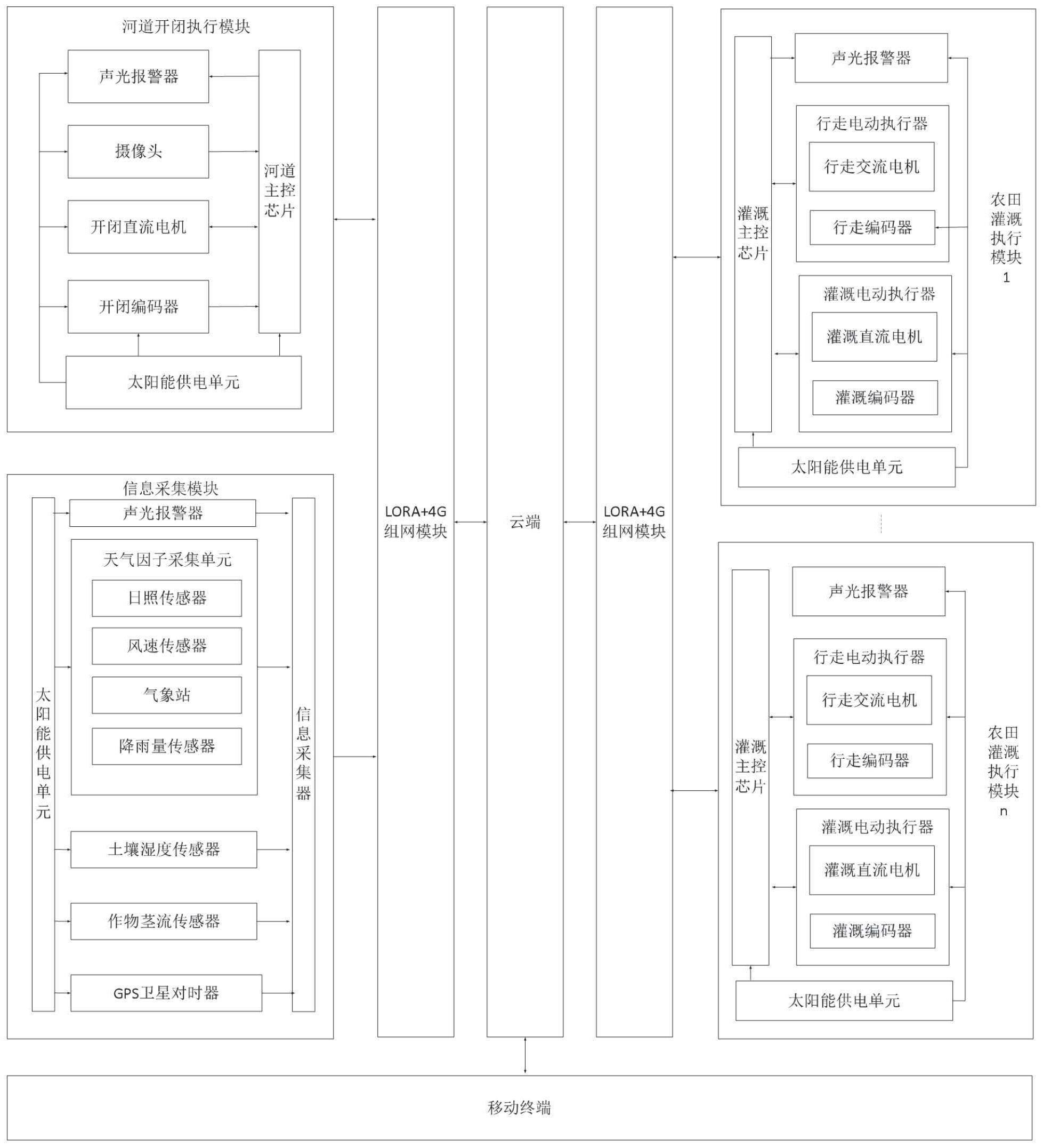
2、为实现上述目的,本发明提供了一种智能灌溉系统,包括电子部分和机械部分,电子部分包括相互通讯的云端以及与云端通讯的信息采集模块、河道开闭执行模块和多个农田灌溉执行模块,云端上搭载有灌溉神经网络模型;
3、农田灌溉执行模块包括sd系列执行机构,sd系列执行机构包括经lora+4g组网模块与云端通讯的灌溉主控芯片和与灌溉主控芯片相连的灌溉电动执行器,灌溉电动执行器包括灌溉阀门、用于控制灌溉阀门开闭以及开度的灌溉直流电机以及用于采集灌溉阀门开度的灌溉编码器。
4、优选的,机械部分包括与河道连通且与待灌溉农田平行布置的灌溉渠以及行走模拟降雨机构,行走模拟降雨机构包括用于抽出灌溉渠内的水的抽水组件、与抽水组件连通的模拟降雨组件和用于沿待灌溉农田的田垄或者田间行走的行走组件,抽水组件和模拟降雨组件均设置于行走组件上。
5、优选的,行走组件包括多个平行设置的行走轮,行走轮的轮轴的外侧与行走交流电机连接;
6、行走交流电机为轮毂电机,行走交流电机经电缆与电网电性连接,电缆缠绕于行走轮上;轮轴为空心轴;
7、模拟降雨组件包括依次穿过多个行走轮的轮轴且与轮轴转动连接的降雨管,降雨管的底端均匀开设有呈矩形阵列布置的多个降雨孔,降雨管的任意一端穿出最外侧的行走轮后与抽水组件连通;
8、降雨管底端且关于降雨孔对称的两侧均设置有重力条,且降雨管的高度高于作物的高度;
9、抽水组件包括一端与降雨管连通的l型随动连通管和设置于l型随动连通管另一端的抽水泵;
10、l型随动连通管设置有抽水泵的一端还连接有喇叭形吸水口,喇叭形吸水口上设置有过滤网;
11、灌溉渠内设置有水位传感器,水位传感器与灌溉主控芯片相连,灌溉主控芯片与抽水泵相连。
12、优选的,农田灌溉执行模块还包括行走执行器,行走执行器包括行走交流电机和用于采集行走交流电机转速的行走编码器,行走交流电机和行走编码器均与灌溉主控芯片相连。
13、优选的,降雨管与轮轴之间经转动滑动定位件连接,转动滑动定位件包括由内到外依次设置于降雨管和轮轴之间的内侧收紧环、外侧压环和转动轴承,内侧收紧环为由围绕降雨管设置的至少三个收紧块组成的环形结构;
14、转动轴承的内侧与外侧压环的外侧螺纹连接,外侧压环的内侧与内侧收紧环的外侧贴合,内侧收紧环与降雨管的外侧固定连接;
15、外侧压环的内侧设置成喇叭形坡道,内侧收紧环的外侧设置成与喇叭形坡道相平行的斜坡结构,内侧收紧环的内侧设置成与降雨管相适配的弧形结构;
16、内侧收紧环的最小外径小于外侧压环的最小内径,内侧收紧环的最大外径小于外侧压环的最大内径,内侧收紧环的长度小于外侧压环的长度。
17、优选的,电子部分还包括河道开闭执行模块,河道开闭执行模块包括经lora+4g组网模块与云端通讯的河道主控芯片以及与河道主控芯片相通讯且并列设置于河道内的多个开关阀门,开关阀门包括开闭直流电机和开闭编码器,开闭直流电机的输出端连接有横向蜗杆,横向蜗杆与蜗轮啮合,蜗轮的中心与竖向丝杠的一端固定连接,竖向丝杠的另一端螺纹连接有螺母,螺母与阀板固定连接;
18、河道上且对应河道开闭执行模块的位置还布置有摄像头,摄像头与河道主控芯片相连;
19、开闭编码器和灌溉编码器均为多圈绝对值编码器。
20、优选的,电子部分还包括信息采集模块,信息采集模块包括布置于待灌溉农田内且经lora+4g组网模块与云端通讯的信息采集器和与信息采集器的相连的天气因子采集单元、土壤湿度传感器、作物茎流传感器和gps对时器;
21、天气因子采集单元包括日照传感器、风速传感器、降雨量传感器和气象站。
22、优选的,农田灌溉执行模块、河道开闭执行模块和信息采集模块均包括太阳能供电单元,太阳能供电单元包括依次串联的太阳能电池板、整流滤波电路和可充电蓄电池;
23、整流滤波电路的输出端以及可充电蓄电池的输出端均与农田灌溉执行模块、河道开闭执行模块或者信息采集模块相连;
24、设定有优先级的云端经程控开关分别与整流滤波电路和可充电蓄电池相连。
25、一种智能灌溉系统的灌溉方法,包括以下步骤:
26、s1、训练灌溉神经网络模型:
27、s11、线上或者线下收集种植信息,并将种植信息汇总成数据集:
28、种植信息包括输入信息和与输入信息对应的输出信息,输入信息包括植株种类信息、发育期信息、日照、风速、降雨量、天气、作物茎流信息和收成信息,输出信息包括灌溉量;
29、s12、将数据集分为训练集和验证集;
30、s13、将训练集输入灌溉神经网络模型,进行模型训练;
31、s14、模型训练完毕后,将测试集中的输入信息输入灌溉神经网络模型,对比判断输出信息是否为对应的输出信息,若是则执行下一步骤,若否则返回步骤s11;
32、s2、现场布置:
33、s21、根据田垄位置或者田间的位置调整行走轮的位置;
34、s22、将抽水泵放入灌溉渠内;
35、s3、利用信息采集模块采集待灌溉农田的种植信息的输入信息,并将采集的输入信息输入云端的灌溉神经网络模型中,经灌溉神经网络模型输出每亩的灌溉量信息;
36、s4、根据步骤s3得到的每亩的灌溉量信息计算灌溉阀门的开度值,根据计算的灌溉阀门开度值控制灌溉电动执行器的阀门开度;
37、s5、经云端向河道开闭执行模块的开闭直流电机发送开指令,打开河道,河道内的水流入灌溉渠内,直至灌溉渠内的水位传感器采集水位值达到设定值;
38、s6、启动行走交流电机和抽水泵,抽水泵在行走的过程中将灌溉渠内的水抽出并经降雨管将水垂直向下喷出;
39、s7、达到设定灌溉时间,关闭行走交流电机和抽水泵,并经开闭直流电机下方阀板,封住河道。
40、优选的,步骤s21具体包括以下步骤:
41、s211、转动外侧压环,在螺纹的作用下,外侧压环与内侧收紧环之间发生相对移动,直至内侧收紧环与外侧压环之间解除压接;
42、s212、沿降雨管的轴向方向移动行走轮,直至行走轮对准田垄或者田间;
43、s213、反向转动外侧压环,直至在斜坡的作用下,外侧压环重新将内侧收紧环压到降雨管上;
44、步骤s4具体包括以下步骤:
45、s41、设定行走轮的行走速度v、农田灌溉执行模块的数量n、每个农田灌溉执行模块的降雨管的长度h、总的灌溉时间t和总的灌溉面积s,得到以下公式:
46、v*t*h*n*x%*l1=l2*s
47、式中,x%为灌溉电动执行器的灌溉阀门开度;l1灌溉电动执行器的灌溉阀门的流量;l2为灌溉量;
48、整理得到:
49、
50、s42、灌溉主控芯片标记灌溉编码器的编码位置匹配到0%-100%;
51、s43、灌溉主控芯片接收到计算的灌溉阀门开度值后,首先判断灌溉阀门的开关状态,若灌溉阀门处于关状态,则向灌溉直流电机发送灌溉阀门打开指令,灌溉直流电机驱动灌溉阀门打开并继续转动,直至灌溉编码器采集到灌溉阀门的开度达到计算的灌溉阀门开度值;若灌溉阀门处于开状态,则进一步对比当前开度值和计算的开度值,根据对比结果驱动灌溉直流电机的转向,直至开度达到计算的开度值。
52、本发明具有以下有益效果:
53、1、可不借助人力,即可根据采集信息利用灌溉神经网络确定开度值,再经计算的开度值自动控制灌溉阀门的开度,实现了真正的无人值守;
54、2、采用太阳能供电的方式,减少了线路铺设成本,避免了线路对种植的影响;
55、3、操作简单,只需按照提示输入已知的种植信息即可自动计算灌溉量,并自动操作灌溉,降低了对种植人员的要求;
56、4、模拟降雨的形式进行灌溉,在节约水资源的基础上,灌溉更为均匀。
57、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!