一种全自动光机电一体化旱生作物施肥机的制作方法
本发明属于智能农用机械的,具体涉及一种全自动光机电一体化旱生作物施肥机。
背景技术:
1、目前,我国农作物灌溉施肥管理还较多的依赖人力,同时管理较为粗放,以人工撒施为主,这种施肥方式费时费力,无法实现精准施肥,肥料的利用率低。
2、针对上述问题,目前市面上有一些全自动农用施肥机,其可实现自动化施肥功能。然而上述全自动农用施肥机基本采用化石燃料作为动力源,其不仅油耗较多,对环境污染较大,而且不能实现无人驾驶,人工驾驶成本较高,因此,有必要对此进行改进。
技术实现思路
1、本发明的目的是提供一种全自动光机电一体化旱生作物施肥机,旨在解决现有的相关技术不仅油耗较多,对环境污染较大,而且人工驾驶成本较高的问题。
2、为了实现上述目的,本发明采用以下技术方案:
3、一种全自动光机电一体化旱生作物施肥机,其包括:
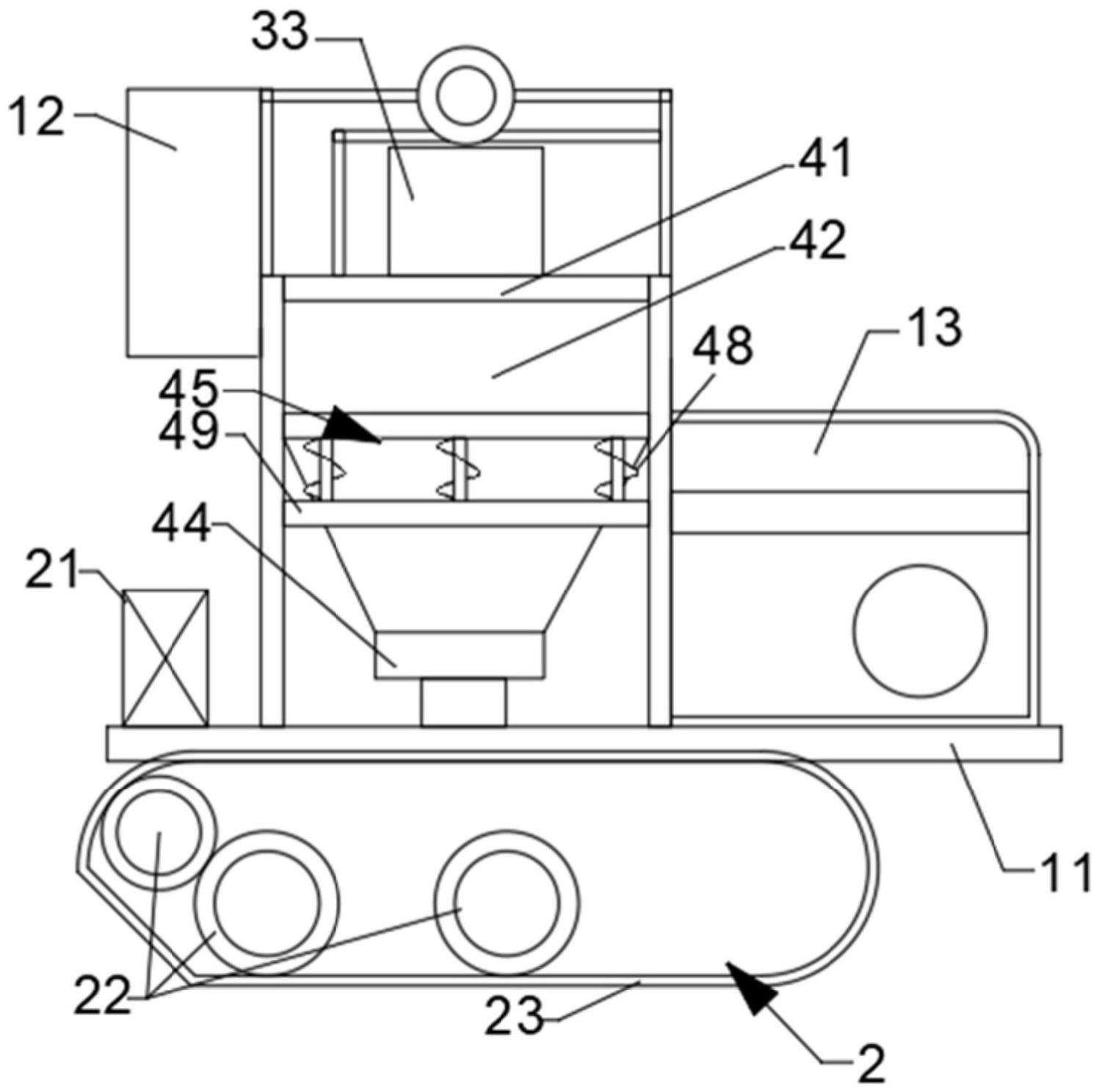
4、底座、控制箱和电池组件,所述控制箱和电池组件均安装在所述底座上;
5、行走驱动组件,所述行走驱动组件用于带动所述底座在地面上行走,所述行走驱动组件至少有两组且均安装在所述底座上;
6、土壤挖穴组件,所述土壤挖穴组件用于对土壤进行挖掘,以形成施肥坑洞,所述土壤挖穴组件安装在所述底座上;
7、施肥送料组件,所述施肥送料组件用于向土壤挖穴组件挖出的施肥坑洞内施肥,所述施肥送料组件至少有两组且均安装在所述底座上;
8、所述行走驱动组件、所述土壤挖穴组件、所述施肥送料组件和所述控制箱均由所述电池组件提供电源,所述行走驱动组件、所述土壤挖穴组件、所述施肥送料组件和所述电池组件均与所述控制箱电性连接。
9、在本发明的一种优选实施例中,所述行走驱动组件包括安装在所述底座上的行走电机、与所述行走电机的输出端连接的行走传动轮,以及套装在所述行走传动轮上的行走履带。
10、在本发明的一种优选实施例中,所述施肥送料组件包括支撑架、肥料收集箱和导料斗,所述肥料收集箱安装在所述支撑架上,所述肥料收集箱上端设有进料口,所述肥料收集箱下端设有出料口,所述导料斗的进料端与所述出料口对应,所述导料斗的出料端与所述施肥坑洞对应。
11、在本发明的一种优选实施例中,所述导料斗的外壁上安装有震动电机,所述支撑架上安装有减震组件。
12、在本发明的一种优选实施例中,所述减震组件包括第一减震弹簧,所述第一减震弹簧一端与所述底座相连接,另一端通过第一减震杆与所述支撑架下端连接。
13、在本发明的一种优选实施例中,所述减震组件还包括第二减震弹簧,所述第二减震弹簧一端与肥料收集箱连接,另一端通过第二减震杆与所述支撑架上端连接。
14、在本发明的一种优选实施例中,所述土壤挖穴组件包括安装在底座上的挖土座,所述挖土座上安装有挖土电机,挖土电机的输出端连接有挖土轴,挖土轴下端连接有挖土叶片。
15、在本发明的一种优选实施例中,所述土壤挖穴组件还包括套设在所述挖土叶片上的套筒,所述套筒的外壁上设置有上限位块,所述挖土座上可上下滑动地设置有下限位块,所述下限位块与所述上限位块相接触并可推动所述上限位块向上移动。
16、在本发明的一种优选实施例中,所述挖土座在套筒两侧均设置有限位杆,每个限位杆上均可上下滑动地套设有下限位块。
17、在本发明的一种优选实施例中,所述挖土座上还设置有用于标记挖土轴的最高行程的上传感器,以及用于标记挖土轴的最低行程的下传感器。
18、本发明的有益效果是:
19、本申请的电池组件可以用于提供电源,以供行走驱动组件、所述土壤挖穴组件、所述施肥送料组件和所述控制箱正常工作,控制箱可以用于控制行走驱动组件、所述土壤挖穴组件、所述施肥送料组件的工作状态;行走驱动组件可以用于控制本申请的行走状态,如前进、后退、左转弯和后转弯中的一种;土壤挖穴组件可以用于挖掘出施肥坑洞,以便于本申请进行施肥;施肥送料组件可以向施肥坑洞内导入混合化肥和旱生作物(如秸秆)肥料,这样,本申请不仅实现了全自动施肥功能,能实现无人驾驶功能,而且无需油耗,对环境没有污染。
技术特征:
1.一种全自动光机电一体化旱生作物施肥机,其特征在于,其包括:
2.根据权利要求1所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述行走驱动组件包括安装在所述底座上的行走电机、与所述行走电机的输出端连接的行走传动轮,以及套装在所述行走传动轮上的行走履带。
3.根据权利要求1所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述施肥送料组件包括支撑架、肥料收集箱和导料斗,所述肥料收集箱安装在所述支撑架上,所述肥料收集箱上端设有进料口,所述肥料收集箱下端设有出料口,所述导料斗的进料端与所述出料口对应,所述导料斗的出料端与所述施肥坑洞对应。
4.根据权利要求3所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述导料斗的外壁上安装有震动电机,所述支撑架上安装有减震组件。
5.根据权利要求4所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述减震组件包括第一减震弹簧,所述第一减震弹簧一端与所述底座相连接,另一端通过第一减震杆与所述支撑架下端连接。
6.根据权利要求5所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述减震组件还包括第二减震弹簧,所述第二减震弹簧一端与肥料收集箱连接,另一端通过第二减震杆与所述支撑架上端连接。
7.根据权利要求1所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述土壤挖穴组件包括安装在底座上的挖土座,所述挖土座上安装有挖土电机,挖土电机的输出端连接有挖土轴,挖土轴下端连接有挖土叶片。
8.根据权利要求7所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述土壤挖穴组件还包括套设在所述挖土叶片上的套筒,所述套筒的外壁上设置有上限位块,所述挖土座上可上下滑动地设置有下限位块,所述下限位块与所述上限位块相接触并可推动所述上限位块向上移动。
9.根据权利要求8所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述挖土座在套筒两侧均设置有限位杆,每个限位杆上均可上下滑动地套设有下限位块。
10.根据权利要求9所述的全自动光机电一体化旱生作物施肥机,其特征在于:所述挖土座上还设置有用于标记挖土轴的最高行程的上传感器,以及用于标记挖土轴的最低行程的下传感器。
技术总结
本发明公开了一种全自动光机电一体化旱生作物施肥机,属于智能农用机械技术领域。其包括:底座、控制箱和电池组件,所述控制箱和电池组件均安装在所述底座上;行走驱动组件,所述行走驱动组件用于带动所述底座在地面上行走,所述行走驱动组件至少有两组且均安装在所述底座上;土壤挖穴组件,所述土壤挖穴组件用于对土壤进行挖掘,以形成施肥坑洞,所述土壤挖穴组件安装在所述土壤挖穴组件上;施肥送料组件,所述施肥送料组件用于向土壤挖穴组件挖出的施肥坑洞内施肥,所述施肥送料组件至少有两组且均安装在所述底座上。本申请本申请不仅实现了全自动施肥功能,能实现无人驾驶功能,而且无需油耗,对环境没有污染。
技术研发人员:曾现武,曾繁宏慧,莫雨桐
受保护的技术使用者:荆门市乐缘商贸有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!