一种具有粉碎压缩功能的可带电作业树障修剪机器人的制作方法
本发明涉及树障清理,具体涉及一种具有粉碎压缩功能的可带电作业树障修剪机器人。
背景技术:
1、在沿海地区,由于阳光和雨量充足,树障的生长速度较快,容易造成树枝与高压线路接触的问题,甚至还可能导致藤蔓植物蔓延至高压线路上。此外,由于台风频繁侵袭,树障也很容易被吹倒后倒伏于高压线路上,给线路带来严重危害。因此,对于架设高度较低的高压线路或者成长较高的树障,经常进行清理工作以降低其对高压线路的危害至关重要。
2、目前带电作业树障清理方式有手动清理式、无人机切割式、爬杆式、挂缆式、斗臂车工清障式、激光炮切割式和手工清理树障。由于手工清理存在安全隐患大、劳动强度高和工作效率低下的缺陷,采用机械方式清理树障的方式较多。
3、现有具有粉碎压缩功能的可带电作业树障修剪机器人对树障进行修剪时,树障往往会直接掉落在地面上,而当切断的树枝掉落在道路地面上时,会给交通流动带来障碍,并且对于后续的清理工作也会带来困难。因此,需要设计一款针对上述问题进行解决的具有粉碎压缩功能的可带电作业树障修剪机器人。
技术实现思路
1、本发明的目的是针对上述技术中存在的不足之处,提出一种具有粉碎压缩功能的可带电作业树障修剪机器人,以解决上述存在的问题。
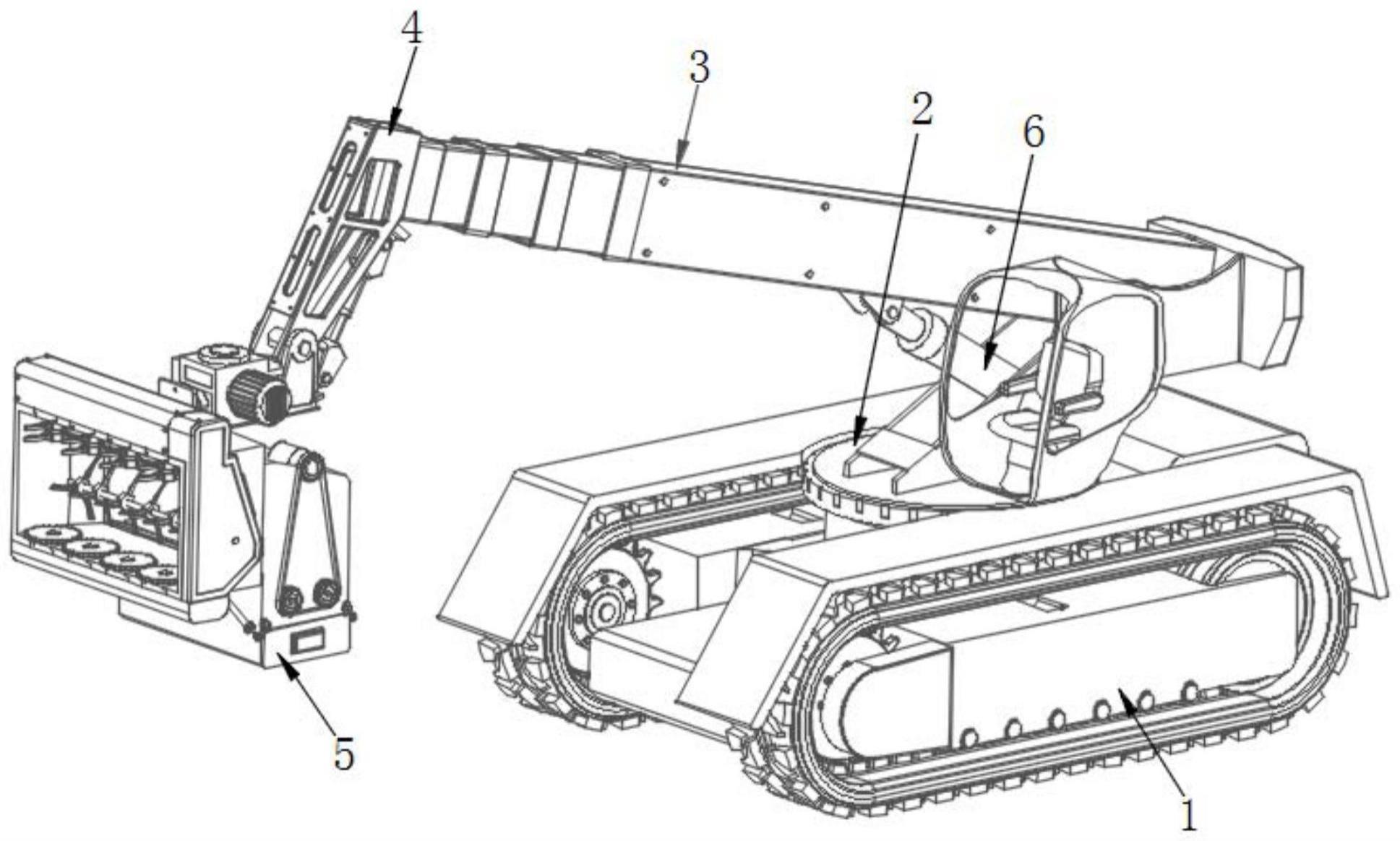
2、本发明提供了一种具有粉碎压缩功能的可带电作业树障修剪机器人,包括履带底盘和转动设于履带底盘上的转动盘;转动盘上转动设置有用于调节树障清理高度的伸缩支撑臂,伸缩支撑臂和转动盘相对侧壁之间转动连接有伸缩部件;伸缩支撑臂远端固定连接有用于调节树障清理修剪角度的仰角调节机构,仰角调节机构的远端设置有用于树障清理修剪的树障清理机构;树障清理机构包括用于修剪粉碎树障的修剪组件,以及用于对修剪粉碎后的树障进行压缩的压缩组件。
3、优选地,仰角调节机构包括固定连接于伸缩支撑臂一端的支撑臂,支撑臂的一端转动连接有转动臂,转动臂和支撑臂之间转动连接有第一液压杆;伸缩部件为液压杆。
4、优选地,修剪组件包括修剪箱,修剪箱的顶部和底部分别均匀开设有多个上安装槽和下安装槽,上安装槽内部可拆卸设置有用于从电缆间分离树障的树障抽离组件,下安装槽内部可拆卸设置有用于修剪树障的树障切割组件;修剪箱内部还设置有用于拉扯、切割树障的分割机构。
5、优选地,分割机构包括传动轴、粉碎组件和第一齿轮,传动轴转动连接在修剪箱的内壁上,粉碎组件固定套设在传动轴的外壁上;传动轴的一端转动贯穿修剪箱并与第一齿轮固定连接,修剪箱侧壁上固定设置有用于驱动传动轴转动的伺服电机,伺服电机输出轴与传动轴相连接,修剪箱顶部和底部分别设置有用于驱动树障抽离组件和树障切割组件转动的第一传动机构和第二传动机构。第一传动机构包括双向蜗杆和固定连接在双向蜗杆一端的第二齿轮,第二传动机构包括单向蜗杆和固定连接在单向蜗杆一端的第三齿轮;修剪箱的顶部一侧设置有减速传动组件,减速传动组件包括第一减速齿轮、第二减速齿轮以及转轴,第一减速齿轮通过转轴与第二减速齿轮同轴连接,转轴通过支架转动设置于修剪箱的顶部,第二减速齿轮和第二齿轮啮合传动连接,第一减速齿轮、第三齿轮以及第一齿轮外壁上共同啮合有第一链条。粉碎组件包括第二承载块和固定连接在第二承载块侧壁上的刀体安装套,刀体安装套侧壁上开设有安装槽,安装槽内部通过螺栓可拆卸连接有刀片。
6、优选地,压缩组件包括树障压缩箱和固定连接在树障压缩箱内壁上的导向板,导向板和树障压缩箱相对侧壁之间均转动连接有粉碎辊,粉碎辊的一端转动贯穿树障压缩箱并固定连接有第四齿轮;树障压缩箱侧壁上且位于第四齿轮的一侧分别转动设置有变向齿轮和导向齿轮,变向齿轮和第四齿轮啮合传动连接;树障压缩箱顶部固定连接有电动机,电动机输出端固定连接有第五齿轮,第五齿轮、变向齿轮以及导向齿轮外壁上共同啮合有第二链条;树障压缩箱的侧壁上位于导向齿轮的下方开设有排料口,排料口内部转动连接有压力感知组件,压力感知组件和树障压缩箱的侧壁之间共同转动连接有第二液压杆,树障压缩箱内部位于导向板的下方设置有树障压缩部件。树障压缩部件包括压缩块、推杆、弧形顶杆、弹簧、圆形板以及弧形推块,压缩块滑动连接与树障压缩箱的内部,推杆固定连接在导向板的侧壁上,且推杆的一端滑动贯穿树障压缩箱并与弧形顶杆固定连接,弹簧套设在推杆的外壁上,圆形板转动设置在弧形顶杆的一侧,弧形推块固定连接在圆形板的侧壁上;圆形板上靠近树障压缩箱的侧壁上固定连接有传动轴,传动轴转动贯穿树障压缩箱并和其中一个粉碎辊相连接。压力感知组件包括挡料板和固定连接在挡料板侧壁上的压力传感器,挡料板上固定连接有控制器,压力传感器与压力传感器电性连接。
7、优选地,树障抽离组件包括第一安装板和转动连接在第一安装板内部的第一转轴,第一转轴的顶端固定连接有和双向蜗杆啮合连接的第一蜗轮,第一转轴上还固定套设有第一承载块,第一承载块内部通过螺栓可拆卸设置有树障抽离钩,树障抽离钩的外壁上固定设置有防滑凸块;树障切割组件包括第二安装板和转动连接在第二安装板内部的第二转轴,第二转轴的顶端固定连接有切割刀,第二转轴的底端固定连接有与单向蜗杆啮合连接的第二蜗轮,第二安装板通过螺栓连接在下安装槽内部。
8、相对现有技术,具有以下有益效果:
9、本发明提供了一种具有粉碎压缩功能的可带电作业树障修剪机器人,解决了目前具有粉碎压缩功能的可带电作业树障修剪机器人对树障进行修剪时,树障会直接掉落在地面上,切断的树枝掉落在道路地面上会给交通流动带来障碍,并且对于后续的清理工作也会带来困难的问题。
技术特征:
1.一种具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,包括履带底盘和转动设于所述履带底盘上的转动盘;所述转动盘上转动设置有用于调节树障清理高度的伸缩支撑臂,所述伸缩支撑臂和所述转动盘相对侧壁之间转动连接有伸缩部件;所述伸缩支撑臂远端固定连接有用于调节树障清理修剪角度的仰角调节机构,所述仰角调节机构的远端设置有用于树障清理修剪的树障清理机构;
2.根据权利要求1所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述仰角调节机构包括固定连接于所述伸缩支撑臂一端的支撑臂,所述支撑臂的一端转动连接有转动臂,所述转动臂和所述支撑臂之间转动连接有第一液压杆;所述伸缩部件为液压杆。
3.根据权利要求1所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述修剪组件包括修剪箱,所述修剪箱的顶部和底部分别均匀开设有多个上安装槽和下安装槽,所述上安装槽内部可拆卸设置有用于从电缆间分离树障的树障抽离组件,所述下安装槽内部可拆卸设置有用于修剪树障的树障切割组件;所述修剪箱内部还设置有用于拉扯、切割树障的分割机构。
4.根据权利要求3所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述分割机构包括传动轴、粉碎组件和第一齿轮,所述传动轴转动连接在所述修剪箱的内壁上,所述粉碎组件固定套设在所述传动轴的外壁上;所述传动轴的一端转动贯穿所述修剪箱并与所述第一齿轮固定连接,所述修剪箱侧壁上固定设置有用于驱动所述传动轴转动的伺服电机,所述伺服电机输出轴与所述传动轴相连接,所述修剪箱顶部和底部分别设置有用于驱动所述树障抽离组件和所述树障切割组件转动的第一传动机构和第二传动机构。
5.根据权利要求4所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述第一传动机构包括双向蜗杆和固定连接在所述双向蜗杆一端的第二齿轮,所述第二传动机构包括单向蜗杆和固定连接在所述单向蜗杆一端的第三齿轮;所述修剪箱的顶部一侧设置有减速传动组件,所述减速传动组件包括第一减速齿轮、第二减速齿轮以及转轴,所述第一减速齿轮通过所述转轴与所述第二减速齿轮同轴连接,所述转轴通过支架转动设置于所述修剪箱的顶部,所述第二减速齿轮和所述第二齿轮啮合传动连接,所述第一减速齿轮、第三齿轮以及第一齿轮外壁上共同啮合有第一链条。
6.根据权利要求1所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述压缩组件包括树障压缩箱和固定连接在所述树障压缩箱内壁上的导向板,所述导向板和所述树障压缩箱相对侧壁之间均转动连接有粉碎辊,所述粉碎辊的一端转动贯穿树障压缩箱并固定连接有第四齿轮;所述树障压缩箱侧壁上且位于所述第四齿轮的一侧分别转动设置有变向齿轮和导向齿轮,所述变向齿轮和所述第四齿轮啮合传动连接;所述树障压缩箱顶部固定连接有电动机,所述电动机输出端固定连接有第五齿轮,所述第五齿轮、变向齿轮以及导向齿轮外壁上共同啮合有第二链条;所述树障压缩箱的侧壁上位于所述导向齿轮的下方开设有排料口,所述排料口内部转动连接有压力感知组件,所述压力感知组件和所述树障压缩箱的侧壁之间共同转动连接有第二液压杆,所述树障压缩箱内部位于所述导向板的下方设置有树障压缩部件。
7.根据权利要求6所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述树障压缩部件包括压缩块、推杆、弧形顶杆、弹簧、圆形板以及弧形推块,所述压缩块滑动连接与所述树障压缩箱的内部,所述推杆固定连接在所述导向板的侧壁上,且所述推杆的一端滑动贯穿所述树障压缩箱并与所述弧形顶杆固定连接,所述弹簧套设在所述推杆的外壁上,所述圆形板转动设置在所述弧形顶杆的一侧,所述弧形推块固定连接在所述圆形板的侧壁上;所述圆形板上靠近所述树障压缩箱的侧壁上固定连接有传动轴,所述传动轴转动贯穿所述树障压缩箱并和其中一个所述粉碎辊相连接。
8.根据权利要求6所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述压力感知组件包括挡料板和固定连接在所述挡料板侧壁上的压力传感器,所述挡料板上固定连接有控制器,所述压力传感器与所述压力传感器电性连接。
9.根据权利要求4所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述树障抽离组件包括第一安装板和转动连接在所述第一安装板内部的第一转轴,所述第一转轴的顶端固定连接有和所述双向蜗杆啮合连接的第一蜗轮,所述第一转轴上还固定套设有第一承载块,所述第一承载块内部通过螺栓可拆卸设置有树障抽离钩,所述树障抽离钩的外壁上固定设置有防滑凸块;所述树障切割组件包括第二安装板和转动连接在所述第二安装板内部的第二转轴,所述第二转轴的顶端固定连接有切割刀,所述第二转轴的底端固定连接有与所述单向蜗杆啮合连接的第二蜗轮,所述第二安装板通过螺栓连接在所述下安装槽内部。
10.根据权利要求3所述的具有粉碎压缩功能的可带电作业树障修剪机器人,其特征在于,所述粉碎组件包括第二承载块和固定连接在所述第二承载块侧壁上的刀体安装套,所述刀体安装套侧壁上开设有安装槽,所述安装槽内部通过螺栓可拆卸连接有刀片。
技术总结
本发明公开了一种具有粉碎压缩功能的可带电作业树障修剪机器人,包括履带底盘和转动设于履带底盘上的转动盘;转动盘上转动设置有用于调节树障清理高度的伸缩支撑臂,伸缩支撑臂和转动盘相对侧壁之间转动连接有伸缩部件;伸缩支撑臂远端固定连接有用于调节树障清理修剪角度的仰角调节机构,仰角调节机构的远端设置有用于树障清理修剪的树障清理机构;树障清理机构包括修剪组件和压缩组件;通过采用上述技术方案,可有效解决了目前具有粉碎压缩功能的可带电作业树障修剪机器人对树障进行修剪时,树障会直接掉落在地面上,切断的树枝掉落在道路地面上会给交通流动带来障碍,并且对于后续的清理工作也会带来困难的问题。
技术研发人员:符方达,陈林聪,陈钦柱
受保护的技术使用者:海南电网有限责任公司电力科学研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!