红薯秧苗分剪机器人的制作方法
本发明涉及农业机械,具体为红薯秧苗分剪机器人。
背景技术:
1、红薯别称番薯、山芋、地瓜等。一年生草本植物,地下部分具圆形、椭圆形或纺锤形的块根,茎平卧或上升,是一种高产而适应性强的粮食作物,与工农业生产和人民生活关系密切。块根除作主粮外,也是食品加工、淀粉和酒精制造工业的重要原料,根、茎、叶又是优良的饲料。
2、但是红薯秧苗在培育过程中,为了使其长得更加茂盛,一般都是需要人工对其枝叶进行修剪,可是人工修剪速度慢,在对红薯秧苗的枝叶进行修建时,需要对枝叶一个一个的进行修剪,无法做到同时修剪,并且市面上也设计出了一种可以对红薯秧苗进行修剪的工具,如公告号为cn114847036a的中国发明专利,具体公开了甘薯秧苗梳理分割设备,但是这种修剪装置,需要工作人员全程手动操作,自动化程度较低。
技术实现思路
1、本发明的目的在于提供红薯秧苗分剪机器人,以解决上述背景技术中所提出的问题。
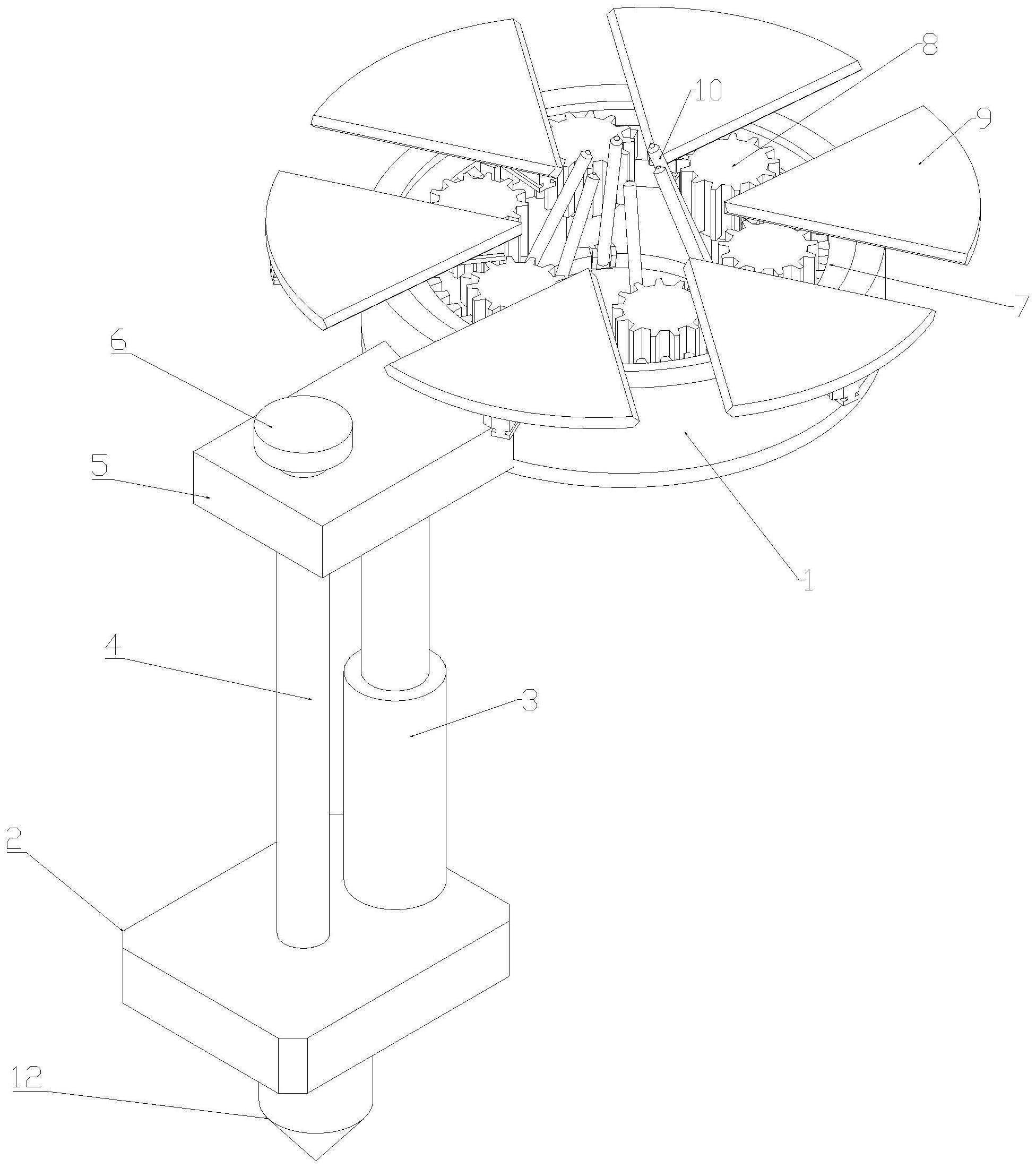
2、为实现上述目的,本发明提供如下技术方案:红薯秧苗分剪机器人,包括罩壳、底板、梳理杆和卡板,所述罩壳侧边设有连接板,底板上设有电动伸缩杆和定位给杆,电动伸缩杆的端部固定在连接板上,罩壳底部设有底板,底板中间开设有贯通的圆孔,罩壳内侧设置有齿环,齿环转动连接在罩壳上,齿环内侧设置有多个齿轮,每个齿轮上均设有转动柱,转动柱转动连接在底板上,并且多个齿轮均与齿环相互啮合,底板下方设有驱动电机,驱动电机的驱动轴与其中一个齿轮的转动柱连接,罩壳上方设有多个卡板,多个卡板之间均设有梳理杆,卡板下方固定有驱动条,驱动条上设有定位滑条,罩壳上开设有与定位滑条适配的滑槽,定位滑条滑动连接在滑槽内,定位滑条侧边设有齿条,齿条与对应的齿轮相互啮合,底板的圆孔内侧均匀设置有多个与梳理杆对应的转动座,梳理杆端部铰接在转动座上;通过将固定板固定在地面,然后将罩壳对准红薯秧苗,然后启动电动伸缩杆,使得电动伸缩杆带动罩壳向下移动,将红薯秧苗整个罩住,移动至红薯秧苗底部后,便可摆动梳理杆,减小多个梳理杆之间的间距,然后利用电动伸缩杆将罩壳向上推动,利用梳理杆梳理红薯秧苗的枝叶,然后利用驱动电机带动其中一个齿轮旋转,利用齿环带动多个齿轮一起旋转,利用齿轮带动卡板向梳理杆靠近,从而将梳理杆梳理出的枝叶断开。
3、优选的,所述卡板的侧边设有刀片,通过在卡板的侧边设置刀片,便可实现卡板将红薯秧苗的枝叶断开。
4、优选的,所述卡板的端部设有弧形边,设置的弧形边可使得卡板在移动时,抵触红薯秧苗的枝叶,以便于红薯秧苗的枝叶向卡板的侧边分散。
5、优选的,所述梳理杆远离转动座的一端为圆头,设置的圆头可防止罩壳在向上移动时,梳理杆接触到红薯秧苗并将红薯秧苗的主茎损坏。
6、优选的,所述定位滑条采用t形滑条,并且罩壳上的滑槽采用与定位滑条适配的t形槽。
7、优选的,所述定位杆固定连接在固定板上,定位杆贯穿连接板并连接有定位块,设置的定位杆主要用于在罩壳上下移动时,提高定位杆稳定性的作用。
8、优选的,所述底板下方设有固定桩,固定桩主要用于将本装置固定在地面,通过将固定桩插入地面,便可将本装置固定。
9、优选的,所述底板通过螺栓固定在罩壳上,底板也可采用其他可拆卸式固定在罩壳上。
10、优选的,所述罩壳为扇形,扇形的罩壳更适配与梳理杆配合,将红薯秧苗的主茎切断。
11、与现有技术相比,本发明的有益效果是:本发明通过将罩壳罩在红薯秧苗上,便可摆动梳理杆,减小多个梳理杆之间的间距,通过利用电动伸缩杆将罩壳向上推动,利用梳理杆梳理红薯秧苗的枝叶,通过多个齿轮旋转,利用齿轮带动卡板向梳理杆靠近,通过卡板侧边的刀片将梳理杆梳理出的枝叶断开,以此实现对红薯秧苗的修剪,有效的提高了本装置的实用性,通过电动伸缩杆推动罩壳上下移动,无需人工移动,减小了工作的劳动量。
技术特征:
1.红薯秧苗分剪机器人,其特征在于:包括罩壳(1)、底板(101)、梳理杆(10)和卡板(9),所述罩壳(1)侧边设有连接板(5),底板(101)上设有电动伸缩杆(3)和定位给杆,电动伸缩杆(3)的端部固定在连接板(5)上,罩壳(1)底部设有底板(101),底板(101)中间开设有贯通的圆孔,罩壳(1)内侧设置有齿环(7),齿环(7)转动连接在罩壳(1)上,齿环(7)内侧设置有多个齿轮(8),每个齿轮(8)上均设有转动柱(801),转动柱(801)转动连接在底板(101)上,并且多个齿轮(8)均与齿环(7)相互啮合,底板(101)下方设有驱动电机(11),驱动电机(11)的驱动轴与其中一个齿轮(8)的转动柱(801)连接,罩壳(1)上方设有多个卡板(9),多个卡板(9)之间均设有梳理杆(10),卡板(9)下方固定有驱动条(901),驱动条(901)上设有定位滑条(9011),罩壳(1)上开设有与定位滑条(9011)适配的滑槽,定位滑条(9011)滑动连接在滑槽内,定位滑条(9011)侧边设有齿条(9012),齿条(9012)与对应的齿轮(8)相互啮合,底板(101)的圆孔内侧均匀设置有多个与梳理杆(10)对应的转动座(102),梳理杆(10)端部铰接在转动座(102)上。
2.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述卡板(9)的侧边设有刀片(902)。
3.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述卡板(9)的端部设有弧形边(903)。
4.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述梳理杆(10)远离转动座(102)的一端为圆头。
5.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述定位滑条(9011)采用t形滑条,并且罩壳(1)上的滑槽采用与定位滑条(9011)适配的t形槽。
6.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述定位杆(4)固定连接在固定板(2)上,定位杆(4)贯穿连接板(5)并连接有定位块(6)。
7.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述底板(101)下方设有固定桩(12)。
8.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述底板(101)通过螺栓固定在罩壳(1)上。
9.根据权利要求1所述的红薯秧苗分剪机器人,其特征在于:所述罩壳(1)为扇形。
技术总结
本发明属于农业机械技术领域,具体公开了红薯秧苗分剪机器人,包括罩壳、底板、梳理杆和卡板,所述罩壳侧边设有连接板,底板上设有电动伸缩杆和定位给杆,罩壳底部设有底板,底板中间开设有贯通的圆孔,罩壳内侧设置有齿环,齿环内侧设置有多个齿轮,每个齿轮上均设有转动柱,底板下方设有驱动电机,罩壳上方设有多个卡板,多个卡板之间均设有梳理杆,卡板下方固定有驱动条,驱动条上设有定位滑条,罩壳上开设有与定位滑条适配的滑槽,定位滑条侧边设有齿条,底板的圆孔内侧均匀设置有多个与梳理杆对应的转动座;通过梳理杆梳理红薯秧苗的枝叶,利用齿轮带动卡板向梳理杆靠近,从而将梳理杆梳理出的枝叶断开。
技术研发人员:于素华,申自辉,申梦婷,申慧君
受保护的技术使用者:界首市金龙机械设备有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!