一种喂料自动校准装置及校准方法与流程
本发明涉及饲喂量校准,特别涉及一种喂料自动校准装置及校准方法。
背景技术:
1、为了实现喂料量的控制,避免饲料的浪费,保持鸡只的采食均匀度,需要对螺旋落料装置设置合适的转速。现有的方法是采用设备厂家提供的料量表,料量表中给出螺旋落料装置在不同的转速下对应的料量,喂料时依据需要的料量对转速进行调整。但在实际现场操作中,不同饲料密度、不同落料蛟龙、不同的行车行走速度等因素都会引起很大的落料偏差,导致料量表失去对于养殖现场的指导意义。在养殖现场,往往都需要人工从食槽中将饲料取出,反复测量每个落料装置的落料量,反复对转速进行调整,工作繁琐,工作量大。
技术实现思路
1、本发明要解决的第一个技术问题是:现有技术中落料量的控制工作繁琐、工作量大的技术问题。
2、为解决上述技术问题,本发明的技术方案是:
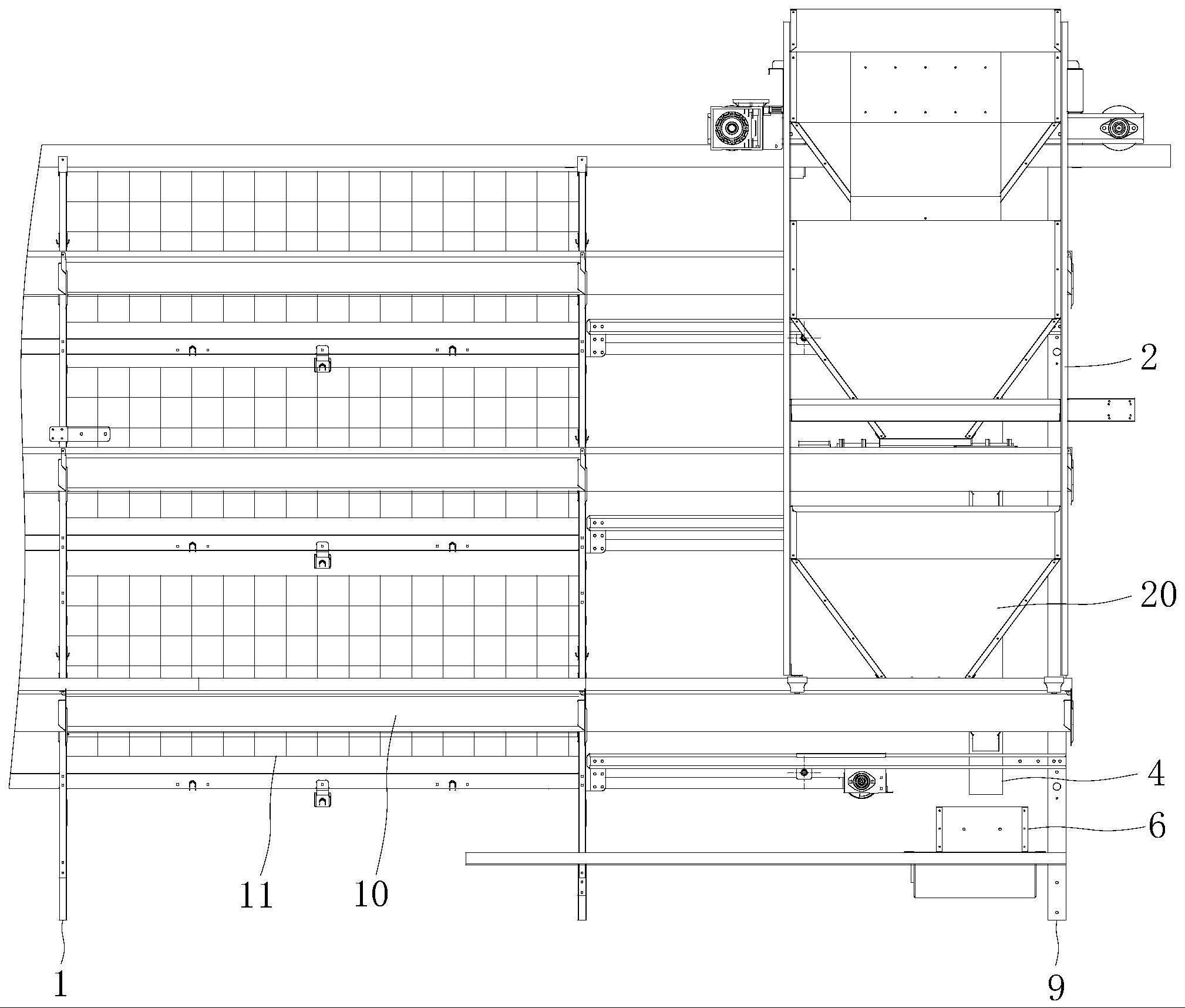
3、一种喂料自动校准装置,包括养殖笼、向养殖笼的食槽喂料的喂料机,以及设置在养殖笼前端的校准装置,喂料机上设置有多个上下间隔的料箱,料箱的下端设有将料箱内的饲料向外输送的螺旋落料装置,螺旋落料装置的底部设有下料口,校准装置包括用于检测喂料机到达校准装置的限位机构、下端开设落料口的导料管、将下料口下落的饲料导入导料管的导料壳体、设置在导料管下方的接料箱,以及用于测得接料箱内饲料重量的称重机。
4、采用上述结构,喂料机行走至校准装置处时,料箱下端的螺旋落料装置按照理论转速运行设定好的时间,称重机对落料量进行称重,依据实测料量和需求料量的差值对螺旋落料装置的转速进行调整,往复落料动作和称重动作,直至转速符合需求料量的要求。按照上述方法依次将剩余料箱的螺旋落料装置的转速调整至符合要求。
5、优选的,导料壳体包括位于食槽内的接料部和贯穿食槽的导料部,导料部的上端连接接料部,导料部的另一端连接导料管,导料部向下倾斜设置。接料部和导料部的设置可以便于将螺旋落料装置导出的饲料导入到导料管内。
6、优选的,接料部的一侧设有向上延伸的支撑部,支撑部的顶端向外弯折且搭靠在食槽上,接料部的另一相对侧的顶端向外弯折且搭靠在食槽上。采用上述结构,可以便于将导料壳体固定在食槽上。
7、优选的,螺旋落料装置的上端开设有连通料箱的开口,螺旋落料装置上安装有将料箱落下的饲料导入开口内的连接壳体,连接壳体的上端可拆卸的安装在料箱上,连接壳体的下端可拆卸的安装在螺旋落料装置上。连接壳体的设置可以便于将螺旋落料装置安装在料箱上。
8、优选的,螺旋落料装置和导料壳体一一对应设置,导料管上开设有连通导料壳体的进料口。导料壳体内的饲料通过进料口进入导料管内。
9、优选的,螺旋落料装置包括落料壳体、转动安装在壳体内的转轴、固接在转轴上的单螺旋叶片,以及驱动转轴转动的电机,下料口设置在壳体的前端底部。采用上述结构,通过控制电机的转速来控制转轴的转速,转轴转动带动单螺旋叶片转动,将饲料输送到下料口处。
10、优选的,限位机构包括设置在喂料机上的感应探头和设置在校准装置上的感应片。感应探头感应到感应片后,喂料机停止行走。
11、优选的,螺旋落料装置包括落料壳体、转动安装在壳体内的转轴,以及驱动转轴转动的电机,下料口设置在壳体的中部,转轴上设有旋向相反的后螺旋叶片和前螺旋叶片,开口设置为两个,两个开口分别设置后螺旋叶片和前螺旋叶片的上方,连接壳体上固接有角形板,角形板将饲料导入开口内。后螺旋叶片和前螺旋叶片同步将通过角形板导入开口内的饲料输送到中间下料口处,可以提高螺旋落料装置的落料效率,避免因为将下料口设置在壳体端部,导致螺旋叶片的输送距离较大,落料速度慢的问题,而且可以避免越靠近下料口的螺旋叶片所受的压力越大,需要输送的饲料越多,饲料易在此处结块的问题。
12、优选的,位于后螺旋叶片和前螺旋叶片之间的转轴段上固接有打料块,打料块能够封闭下料口,打料块的外端开设有凹槽,凹槽内固接有多个打料齿。打料块和打料齿的设置可以对输送到下料口上方的饲料进行打料,避免饲料结块,并且可以随转轴转动将饲料拨出下料口,提高落料效率,并且打料块可以在螺旋落料装置关闭时,对下料口进行封闭,避免残余饲料落下。
13、本发明要解决的第二个技术问题是:现有技术中无法自动对每个落料装置的转速进行校准,对落料量进行控制的技术问题。
14、一种使用喂料自动校准装置的校准方法,包括以下步骤:
15、步骤一:喂料机行走至校准装置处,由限位机构限位停止;
16、步骤二:螺旋落料装置按照理论转速运行每组养殖笼的喂料时间t,称重机测得饲料的实测料量,对螺旋落料装置的转速r进行校准,校准公式如下:
17、d=m×n;
18、k=v×ρ=实测料量/(r×t);
19、r=m×n/(k×t);
20、其中,d为需求料量,m为每只鸡的目标料量,n为预定鸡的只数,t为每组养殖笼的喂料时间,k为每转料量k,v为每转体积,ρ为饲料密度;
21、步骤三:螺旋落料装置按照校准后的转速r运行每组养殖笼的喂料时间t,验证实测料量与需求料量的差值是否在误差范围内;
22、步骤四:实测料量与需求料量的差值在误差范围内时,结束校准;实测料量与需求料量的差值在误差范围外时,继续按照步骤三中的校准公式对转速r进行校准,直至实测料量与需求料量的差值在误差范围内。
23、采用上述方法,依据实测料量对螺旋落料装置的转速进行校准,使得自动对每个落料装置的转速进行校准,对落料量进行控制,实现精准喂料。
24、采用了上述技术方案后,本发明的有益效果是:
25、1、喂料机行走至校准装置处时,料箱下端的螺旋落料装置按照理论转速运行设定好的时间,称重机对落料量进行称重,依据实测料量和需求料量的差值对螺旋落料装置的转速进行调整,往复落料动作和称重动作,直至转速符合需求料量的要求。按照上述方法依次将剩余料箱的螺旋落料装置的转速调整至符合要求。
26、2、前螺旋叶片和后螺旋叶片同步将通过角形板导入开口内的饲料输送到中间下料口处,可以提高螺旋落料装置的落料效率,避免因为将下料口设置在壳体端部,导致螺旋叶片的输送距离较大,落料速度慢的问题,而且可以避免越靠近下料口的螺旋叶片所受的压力越大,需要输送的饲料越多,饲料易在此处结块的问题。
27、3、本发明可通过自动校准装置自动测定螺旋落料装置在不同转速下对应的喂料量,从而解决了人工调整料量调不准的问题,且节省了复杂的人工测定料量过程,从而大大避免了饲料浪费,节约大量人工成本。
技术特征:
1.一种喂料自动校准装置,其特征在于,包括养殖笼、向养殖笼的食槽喂料的喂料机,以及设置在养殖笼前端的校准装置;所述喂料机上设置有多个上下间隔的料箱,料箱的下端设有将料箱内的饲料向外输送的螺旋落料装置,所述螺旋落料装置的底部设有下料口;所述校准装置包括用于检测喂料机到达校准装置的限位机构、下端开设落料口的导料管、将下料口下落的饲料导入导料管的导料壳体、设置在导料管下方的接料箱,以及用于测得接料箱内饲料重量的称重机。
2.如权利要求1所述的一种喂料自动校准装置,其特征在于,所述导料壳体包括位于食槽内的接料部和贯穿食槽的导料部,导料部的上端连接接料部,导料部的另一端连接导料管,所述导料部向下倾斜设置。
3.如权利要求2所述的一种喂料自动校准装置,其特征在于,所述接料部的一侧设有向上延伸的支撑部,所述支撑部的顶端向外弯折且搭靠在食槽上,接料部的另一相对侧的顶端向外弯折且搭靠在食槽上。
4.如权利要求1所述的一种喂料自动校准装置,其特征在于,所述螺旋落料装置的上端开设有连通料箱的开口,所述螺旋落料装置上安装有将料箱落下的饲料导入开口内的连接壳体,连接壳体的上端可拆卸的安装在料箱上,连接壳体的下端可拆卸的安装在螺旋落料装置上。
5.如权利要求1所述的一种喂料自动校准装置,其特征在于,螺旋落料装置和导料壳体一一对应设置,导料管上开设有连通导料壳体的进料口。
6.如权利要求1所述的一种喂料自动校准装置,其特征在于,所述螺旋落料装置包括落料壳体、转动安装在落料壳体内的转轴、固接在转轴上的单螺旋叶片,以及驱动转轴转动的电机,下料口设置在落料壳体的前端底部。
7.如权利要求1所述的一种喂料自动校准装置,其特征在于,所述限位机构包括设置在喂料机上的感应探头和设置在校准装置上的感应片。
8.如权利要求4所述的一种喂料自动校准装置,其特征在于,所述螺旋落料装置包括落料壳体、转动安装在落料壳体内的转轴,以及驱动转轴转动的电机,下料口设置在落料壳体的中部,所述转轴上设有旋向相反的后螺旋叶片和前螺旋叶片,开口设置为两个,两个开口分别设置后螺旋叶片和前螺旋叶片的上方,所述连接壳体上固接有角形板,角形板将饲料导入开口内。
9.如权利要求8所述的一种喂料自动校准装置,其特征在于,位于后螺旋叶片和前螺旋叶片之间的转轴段上固接有打料块,打料块能够封闭下料口,打料块的外端开设有凹槽,凹槽内固接有多个打料齿。
10.一种使用如权利要求1至9中任一项所述的喂料自动校准装置的校准方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种喂料自动校准装置及校准方法,涉及饲喂量校准技术领域,包括养殖笼、向养殖笼的食槽喂料的喂料机,以及设置在养殖笼前端的校准装置,喂料机上设置有多个上下间隔的料箱,料箱的下端设有将料箱内的饲料向外输送的螺旋落料装置,螺旋落料装置的底部设有下料口,校准装置包括用于检测喂料机到达校准装置的限位机构、下端开设落料口的导料管、将下料口下落的饲料导入导料管的导料壳体、设置在导料管下方的接料箱,以及用于测得接料箱内饲料重量的称重机。本发明可通过自动校准装置自动测定螺旋落料装置在不同转速下对应的喂料量,节约大量人工成本。
技术研发人员:刘福军,李相尚,程箫,田满昌,曹树涛,李栋,刘忠明,成书蒙,王友,展飞翔,郑树利
受保护的技术使用者:青岛大牧人机械股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!