一种基于采食量的肉禽精准饲喂方法及装置
本发明属于智能畜牧养殖装备,具体涉及一种基于采食量的肉禽精准饲喂方法及装置。
背景技术:
1、精准饲喂作为近些年来规模化养殖兴起的管理手段,在提升生产效率、降低生产成本上具有重要作用。
2、在规模化养殖中,又将养殖方式进一步分为网上平养、地面平养、笼养。在网上平养和笼养的养殖方式内,肉禽被限定在规定的区域内,采食区域相对固定,然而地面平养的肉禽采食具有地点随机性、时间随机性等特点。但是地面平养是将肉禽散养在地面上,饲喂的设施应尽量避免肉禽的打斗、踩踏、啄食等习性,现有设备并未考虑到肉禽的这些习性。
3、传统散养肉禽喂料分为人工和机械两种。人工饲喂是通过人工将饲料加入料槽,劳动量大,机械饲喂是采用搅簧运输,将饲料从料仓运输到饲料槽内。但是采食结束后,饲料槽内往往具有大量的饲料剩余,剩余饲料长时间不清理会对肉禽的生产环境造成污染,甚至会导致肉禽的健康状况堪忧。虽然相较于人工,机械饲喂节省人力,但是难以根据料槽余料量准确添加饲料量,不能保证饲料余量在合理范围内。
技术实现思路
1、针对现有技术中存在不足,本发明提供了一种基于采食量的肉禽精准饲喂方法及装置。
2、本发明是通过以下技术手段实现上述技术目的的。
3、一种基于采食量的肉禽精准饲喂方法:
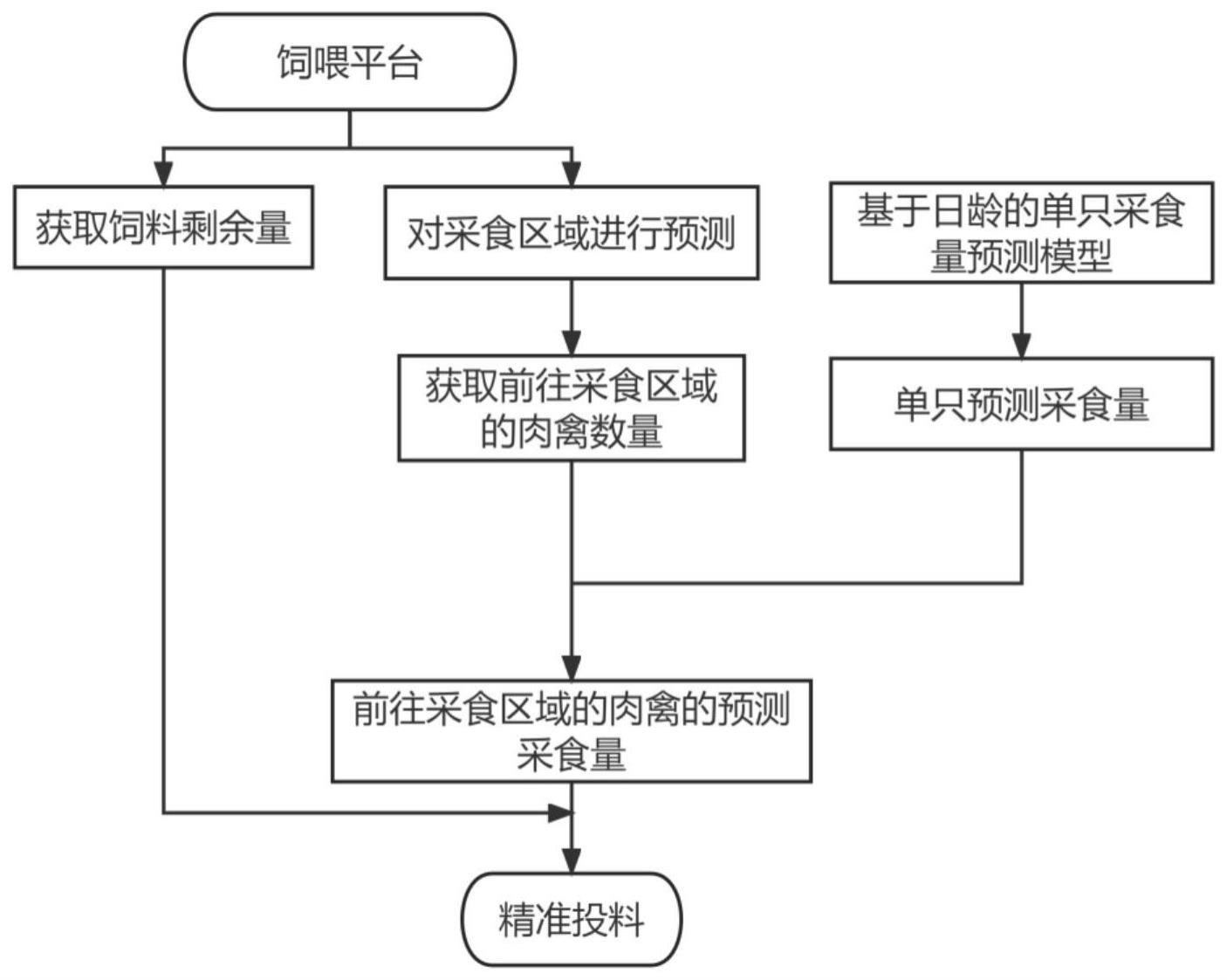
4、由单独饲喂的肉禽,确定单只肉禽采食量,对不同日龄的肉禽进行采食量采集,根据采食量数据建立单只肉禽的基于日龄的采食量预测模型;
5、对前往采食区域的肉禽进行状态跟踪,确定前往采食区域肉禽的数量;
6、根据采食量预测模型和前往采食区域内肉禽的数量,进而得到采食区域内肉禽的预测采食量;
7、由预测采食量与饲料剩余量计算饲喂量,根据所计算的饲喂量,实现精准投料。
8、进一步地,所述采食量预测模型的过程为:
9、所述采食量数据由饲料投喂量减去饲料剩余量得到;
10、先利用k折交叉验证法对采食量数据进行分类,然后使用前向逐步回归算法建立单只肉禽的基于日龄的采食量预测模型,最后采取网格搜索和k折交叉验证对超参数进行调整。
11、进一步地,所述状态跟踪并确定前往采食区域肉禽的数量,是利用strongsort算法实现的。
12、进一步地,所述采食区域内肉禽的预测采食量为:
13、cqy=cyc×n
14、其中:cqy是采食区域内肉禽的预测采食量;cyc是根据采食量预测模型得到的单只采食量预测值;n为前往采食区域肉禽的数量。
15、进一步地,投料结束后,对采食量预测模型进行实时更新,具体为:
16、采食结束后,对采食区域内的饲料槽进行饲料剩余量检测,结合采食前精准投料的饲料量得到本次饲喂的采食量,再根据采食区域内肉禽数量得到平均采食量;对平均采食量进行阈值判断,若不低于阈值,满足精准饲喂的要求,若低于阈值,则将此次采食量数据记录下来,并与采食前禽舍采集的采食量数据一起再进行预测模型的建立,下次饲喂根据新预测模型进行精准投料,循环往复。
17、进一步地,所述饲料剩余量的获取过程为:
18、对剩余饲料进行超声波探测,将返回的数字信号处理得到二维图像,然后对二维图像进行三维重建,得到三维模型,再对三维模型进行体积计算,将体积乘上饲料的密度,进而确定饲料剩余量。
19、进一步地,对饲料剩余量进行判断,若是饲料剩余量为零,将采食区域内的预测采食量乘以k,即本次精准投料的饲料量,肉禽采食结束后再次进行饲料剩余量检测,若是此次饲料剩余量检测值仍为零,则选取下一个k值并进入循环,直至饲料剩余量不为零为止;若饲料剩余量不为零,将预测采食量减去饲料剩余量,即为本次精准投料的饲料量,其中k=0.1f+1.1,f为循环次数。
20、一种基于采食量的肉禽精准饲喂装置,包括:
21、轨道,设置在禽舍内;
22、料斗,位于轨道上方,且能够沿轨道运行;
23、电磁阀,位于料斗的输送管道内部;
24、超声波测距模块,位于料斗前进方向上,用于对饲料剩余量进行检测;
25、摄像头,位于料斗前进方向上,用于检测采食区域内肉禽数量;
26、下料管道,位于轨道下方;
27、饲料槽,放置在下料管道下端;
28、控制模块,用于控制料斗的运动,以及对采食区域内肉禽的采食量进行预测、精准投料。
29、上述技术方案中,所述料斗下方设有带有轮子的板子,板子上设有蓄电池,超声波测距模块、控制模块和摄像头也设置在板子上。
30、上述技术方案中,还包括辅助轮,辅助轮与轮子相连接,辅助轮尾端嵌在轨道中。
31、上述技术方案中,还包括红外发射器,设置在下料管道顶部所在的轨道内部。
32、本发明的有益效果为:本发明将饲喂装置置于上方,减少了肉禽对设施的干扰;对由单独饲喂的肉禽进行采食量采集,建立了单只肉禽的基于日龄的采食量预测模型;对前往采食区域的肉禽进行状态跟踪,确定前往采食区域肉禽的数量;根据采食量预测模型和前往采食区域内肉禽的数量,进而得到采食区域内肉禽的预测采食量;由预测采食量与饲料剩余量计算饲喂量,根据所计算的饲喂量,实现精准投料。采食结束后,根据饲料剩余量对采食量预测模型进行实时更新。本发明基于肉禽生长需求进行精准饲喂,减少了饲料的浪费,同时不会对环境造成污染,进而不会影响肉禽的健康状况。
技术特征:
1.一种基于采食量的肉禽精准饲喂方法,其特征在于:
2.根据权利要求1所述的基于采食量的肉禽精准饲喂方法,其特征在于,所述采食量预测模型的过程为:
3.根据权利要求1所述的基于采食量的肉禽精准饲喂方法,其特征在于,所述状态跟踪并确定前往采食区域肉禽的数量,是利用strongsort算法实现的。
4.根据权利要求1所述的基于采食量的肉禽精准饲喂方法,其特征在于,所述采食区域内肉禽的预测采食量为:
5.根据权利要求1所述的基于采食量的肉禽精准饲喂方法,其特征在于,投料结束后,对采食量预测模型进行实时更新,具体为:
6.根据权利要求1所述的基于采食量的肉禽精准饲喂方法,其特征在于,所述饲料剩余量的获取过程为:
7.根据权利要求6所述的基于采食量的肉禽精准饲喂方法,其特征在于,对饲料剩余量进行判断,若是饲料剩余量为零,将采食区域内的预测采食量乘以k,即本次精准投料的饲料量,肉禽采食结束后再次进行饲料剩余量检测,若是此次饲料剩余量检测值仍为零,则选取下一个k值并进入循环,直至饲料剩余量不为零为止;若饲料剩余量不为零,将预测采食量减去饲料剩余量,即为本次精准投料的饲料量,其中k=0.1f+1.1,f为循环次数。
8.一种实现权利要求1-7任一项所述的基于采食量的肉禽精准饲喂方法的装置,其特征在于,包括:
9.根据权利要求8所述的装置,其特征在于,所述料斗(1)下方设有带有轮子的板子(13),板子(13)上设有蓄电池(8),超声波测距模块(7)、控制模块(9)和摄像头(10)也设置在板子(13)上。
10.根据权利要求8所述的装置,其特征在于,还包括辅助轮(4)和红外发射器(3),辅助轮(4)与轮子相连接,辅助轮(4)尾端嵌在轨道(12)中;红外发射器(3)设置在下料管道(5)顶部所在的轨道内部。
技术总结
本发明公开了一种基于采食量的肉禽精准饲喂方法及装置,对不同日龄的肉禽进行采食量采集,根据采食量数据建立单只肉禽的基于日龄的采食量预测模型;对前往采食区域的肉禽进行状态跟踪,确定前往采食区域肉禽的数量;再根据采食量预测模型和前往采食区域内肉禽的数量,进而得到采食区域内肉禽的预测采食量;最后由预测采食量与饲料剩余量计算饲喂量,根据所计算的饲喂量,实现精准投料。本发明基于肉禽生长需求进行精准饲喂,减少了饲料的浪费。
技术研发人员:袁俊杰,谈学亮,王纪章,应诗家
受保护的技术使用者:江苏大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!