一种割草机器人、归零校准方法以及控制方法与流程
本发明涉及智能设备,尤其涉及一种割草机器人、归零校准方法以及控制方法。
背景技术:
1、割草机器人能自主的完成修剪草坪的工作,无须人为直接控制和操作,且功率低、噪音小、外形精巧美观,大幅度降低人工操作。因此,越来越多家庭选择使用家用智能割草机。
2、割草机器人一般具备不同切割高度,用于满足用户切割不同高度草坪的需求。但是在没有进行校准的情况下,如果多次调节割草机器人的切割高度,很容易在不同高度之间往复切换的过程中产生累积误差,导致割草机器人的控制精度下降,影响割草机器人的工作效果,用户体验感差。
技术实现思路
1、为了解决当前割草机器人在不同的高度之间往复切换的过程中会产生误差累积,导致割草机器人的控制精度下降,影响割草机器人的工作效率的技术问题,本发明提供了一种割草机器人、归零校准方法以及控制方法。
2、本发明提供的技术方案如下:
3、第一方面
4、本发明提供的一种割草机器人,包括切割组件和用于调节切割组件高度的调高组件,切割组件包括:刀盘、用于驱动刀盘转动的切割电机、及套在切割电机外部的电机筒,调高组件包括:调高电机、及由调高电机带动进行旋转运动的螺杆;螺杆与电机筒连接,螺杆带动电机筒进行上下升降运动,调高电机带动刀盘进行升降运动;
5、所述刀盘具有第一工作高度和第二工作高度,在刀盘由第一工作高度切换至第二工作高度的过程中,对割草机器人进行归零校准。
6、第二方面
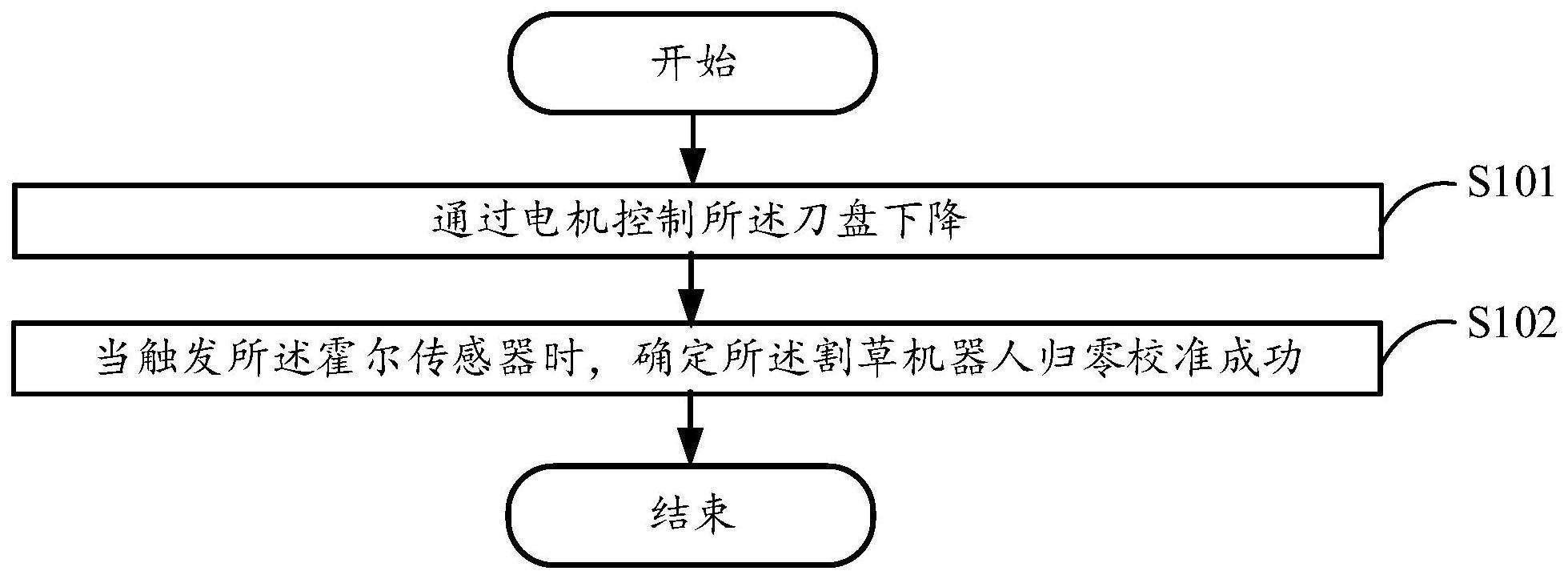
7、本发明提供的一种归零校准方法,应用于第一方面的割草机器人,包括:
8、s101:通过调高电机控制刀盘下降;
9、s102:当触发霍尔传感器时,确定割草机器人归零校准成功。
10、第三方面
11、本发明提供的一种控制方法,应用于第一方面的割草机器人,包括:
12、s201:接收档位控制指令;
13、s202:通过调高电机控制刀盘下降,对刀盘进行归零校准;
14、s203:通过调高电机控制归零校准后的刀盘上升,直至上升至与档位控制指令相对应的目标高度。
15、上述技术方案,与现有技术相比至少具有如下有益效果:
16、在本发明中,每次在不同的高度档位之间切换的过程中都会进行归零校准,避免误差累积,提升割草机器人的控制精度,提高用户体验感。
技术特征:
1.一种割草机器人,其特征在于,所述割草机器人包括切割组件和用于调节切割组件高度的调高组件,所述切割组件包括:刀盘、用于驱动所述刀盘转动的切割电机、及套在所述切割电机外部的电机筒,所述调高组件包括:调高电机、及由所述调高电机带动进行旋转运动的螺杆;所述螺杆与所述电机筒连接,所述螺杆带动所述电机筒进行上下升降运动,所述调高电机带动所述刀盘进行升降运动;
2.根据权利要求1所述的割草机器人,其特征在于,所述对所述割草机器人进行归零校准包括:
3.根据权利要求2所述的割草机器人,其特征在于,所述割草机器人的底座设置有霍尔传感器,所述螺杆上设置有磁铁,当所述刀盘在下降时,所述磁铁随着螺杆的旋转进行旋转,当所述磁铁触发所述霍尔传感器时,调高电机停止运行,所述割草机器人到达归零校准位置。
4.根据权利要求3所述的割草机器人,其特征在于,所述调高电机上设置有霍尔编码器,所述霍尔编码器对所述调高电机的转动圈数进行统计,所述割草机器人预存有从所述归零校准位置到所述第二工作高度需要调高电机旋转的预设转动圈数;当所述调高电机以第二方向旋转达到所述预设转动圈数时,所述调高电机停止运行。
5.一种归零校准方法,其特征在于,应用于权利要求3所述的割草机器人,包括:
6.根据权利要求5所述的归零校准方法,其特征在于,在s101之后还包括:
7.根据权利要求6所述的归零校准方法,其特征在于,所述预设时长为保护时长的两倍,所述保护时长为正常状态下所述刀盘从最高点下降到最低点所述调高电机旋转的时长。
8.根据权利要求5所述的归零校准方法,其特征在于,在s101之后还包括:
9.一种控制方法,其特征在于,应用于权利要求4所述的割草机器人,包括:
10.根据权利要求9所述的控制方法,其特征在于,所述s203具体包括:
技术总结
本发明提供一种割草机器人、归零校准方法以及控制方法,涉及智能设备技术领域,割草机器人包括切割组件和用于调节切割组件高度的调高组件,切割组件包括:刀盘、切割电机、电机筒,调高组件包括:调高电机、螺杆;螺杆与电机筒连接,螺杆带动电机筒进行上下升降运动,调高电机带动刀盘进行升降运动;刀盘具有第一工作高度和第二工作高度,在刀盘由第一工作高度切换至第二工作高度的过程中,对割草机器人进行归零校准。本发明中,每次在不同的高度档位之间切换的过程中都会进行归零校准,避免误差累积,提升割草机器人的控制精度。
技术研发人员:陈晨
受保护的技术使用者:江苏东成机电工具有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!