自动化立体种植系统的制作方法
本发明涉及大棚种植,尤其涉及自动化立体种植系统。
背景技术:
1、大棚种植是种植的一种方式,能够有效地控制棚内温湿度,生产优质的反季节农产品。
2、反季节中在大棚内种植草莓通常采用栽培架,并在栽培架两侧设置两排可培育栽种的托架,用来培育草莓,如公开号cn115720782a的专利文件,其中公开固定式草莓支架,且在支架两侧设置两排托架,经过日常施肥、浇水,待到草莓成熟后会进行集中采摘。
3、这类栽培草莓支架在对成熟的草莓果实采摘时,需要人员走动且围绕栽培架一周并对各个草莓植株上的草莓果实进行采摘,一方面这种采摘方式较为费时费力,另一方面大棚内在两个相邻的栽培架之间需要提前布置允许采摘员走动的区域,从而占据了大棚内的部分空间。
技术实现思路
1、本发明的目的是提出自动化立体种植系统,仅使得采摘人员停留在栽培支架一处固定方位即可对整个栽培支架上各个草莓植株上的果实采摘,方便省力,同时也避免在大棚内布置采摘人员围绕栽培支架走动的区域,更加有效地利用大棚内空间。
2、为了实现上述目的,本发明采用了如下技术方案:
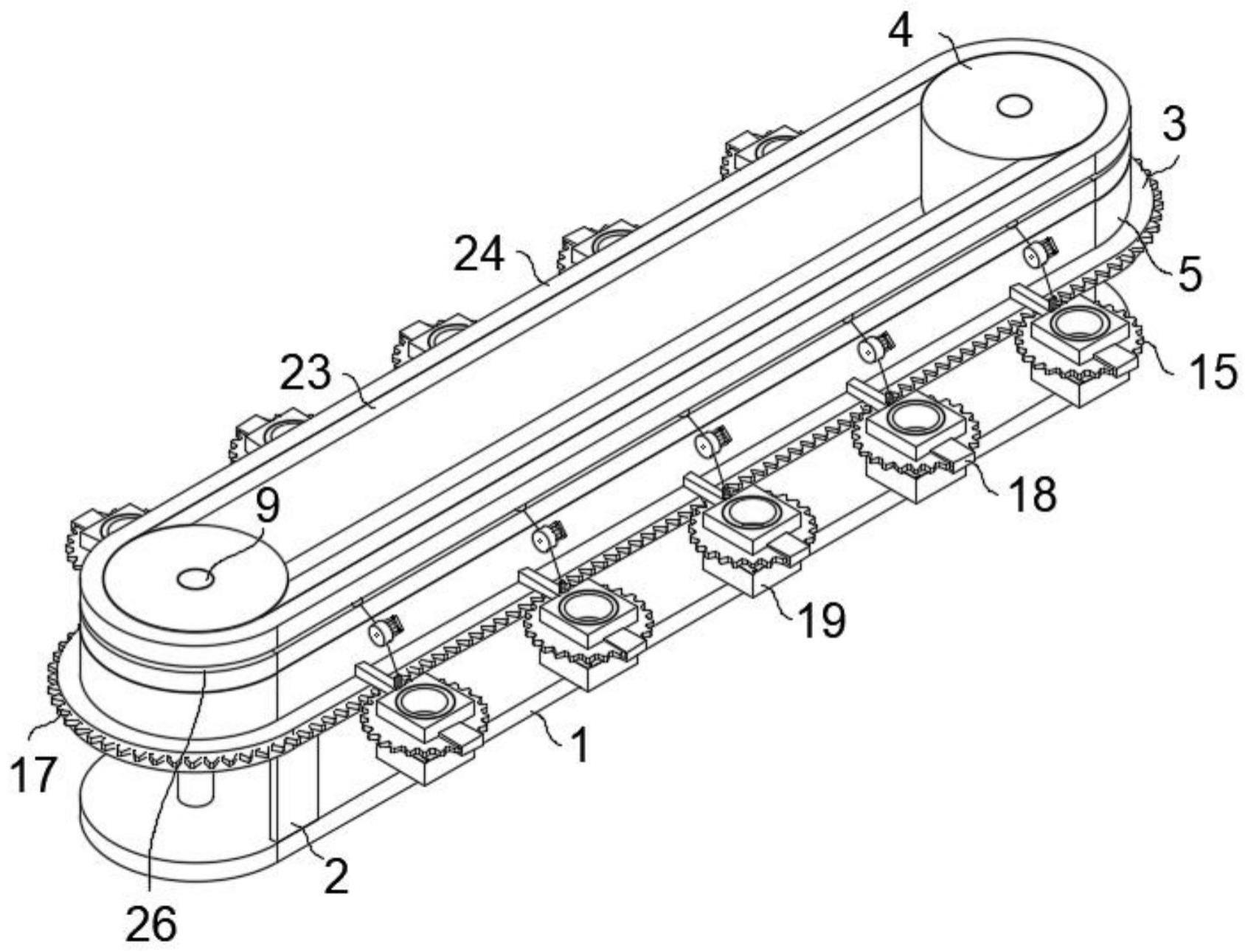
3、自动化立体种植系统,包括两个辊筒,两个所述辊筒之间相对固定,在两个辊筒之间设置一个传送带,其中一个所述辊筒设置动力机构,可驱动所述传送带运转,所述传送带四周设置多个用于培育草莓的栽培盆,随着所述传送带的运转,可使得各个具有草莓的栽培盆跟随同步运转。
4、优选地,所述种植系统还包括底板,所述底板上固定连接多个立板,多个所述立板的上端均固定连接同一个支撑板,所述支撑板的两端均为半圆形形状,两个所述辊筒对称设置在所述支撑板上,所述传送带不超出所述支撑板的边缘,在所述传送带上粘接多个矩形块,所述矩形块与所述支撑板贴合,为所述矩形块提供足够支撑,所述矩形块设置第一连接块,所述第一连接块与所述栽培盆连接设置。
5、优选地,在所述底板上转动连接两个转轴,两个所述转轴分别对应于两个所述辊筒,所述转轴向上延伸并依次贯穿所述支撑板以及所述辊筒,所述转轴与所述辊筒同轴心固定连接,在所述底板上安装步进电机,在所述步进电机的输出轴以及其中一个所述转轴外壁上均固定连接齿轮,两个所述齿轮之间相互啮合连接。
6、优选地,所述第一连接块开设圆槽,所述圆槽底部固定连接支撑环,圆形的所述栽培盆置于所述圆槽内,并由所述支撑环支撑,所述栽培盆底部具有透气孔,所述第一连接块从中间剖开,形成上下两个独立结构,所述栽培盆外壁固定连接固定环,所述固定环位于所述第一连接块剖开处,所述固定环外缘等距开设多个齿槽,并围绕所述固定环一周,所述支撑板外缘密集排布多个齿块,所述支撑板外缘和所述固定环之间啮合连接,所述第一连接块还设置一个连接板,所述连接板的两端分别与所述第一连接块的上下两个独立结构固定连接。
7、优选地,所述第一连接块下方设置第二连接块,所述第二连接块开设矩形槽,用于种植食用菌,所述第一连接块开设两个限位槽,所述第二连接块固定连接两个限位块,所述限位槽和所述限位块的截面均为“t”型形状,所述限位槽与所述限位块之间滑动连接。
8、优选地,所述支撑板上固定连接两个长板,两个所述长板均与所述传送带内圈贴合,两个所述长板还固定连接闭环体,所述闭环体与传送带形状相同且位于所述传送带上方,在所述闭环体设置多个可滑动的球体,所述闭环体开设围绕所述闭环体一圈的球槽,所述球体扣合在所述球槽内并可在所述球槽内滑动,所述球体的数量与所述栽培盆数量相同,在所述球体和所述矩形块之间设置一个倾斜排布的线材。
9、优选地,所述矩形块靠近所述第一连接块的一端并开设“凸”字型槽口,所述第一连接块固定连接“凸”字型滑块,所述滑块与所述槽口滑动连接,所述线材分割为两部分,分别为第一部分和第二部分,第一部分的一端与所述球体连接,另一端连接收卷部件,第二部分的一端与所述滑块连接,另一端与收卷部件连接,所述收卷部件可以调控所述线材的第二部分伸出的长度,从而控制所述滑块上下移动。
10、优选地,所述收卷部件包括一个圆形块和与圆形块固定相连的方形块,所述圆形块具有圆形腔室,所述圆形腔室内设置可旋转的收卷轴,所述收卷轴与所述圆形块同轴心连接,所述方形块安装伺服电机,所述伺服电机的输出轴与所述收卷轴的一端固定连接,可通过所述伺服电机调控所述收卷轴的正反转,所述圆形块还开设一个开口,所述开口与所述圆形腔室连通,所述线材的第二部分的一端伸入所述开口并与所述收卷轴外壁连接,所述收卷轴的正反转控制所述线材第二部分的收卷与放松。
11、自动化立体种植系统的应用,包括以下步骤:
12、采摘人员停留在任意一个栽培盆前,对栽培盆内的草莓果实进行采摘;
13、启动步进电机,带动转轴和辊筒旋转,驱动传送带运行旋转,使得各个栽培盆同步跟随旋转;
14、在栽培盆跟随传送带同步运转时,因与栽培盆固定相连的固定环与支撑板外缘的啮合连接,使得栽培盆在围绕支撑板运转时,也会以自身为旋转轴作旋转运动;
15、调控伺服电机,使得收卷轴相应旋转,使得收卷轴上收卷的线材逐步放松,使得位于开口外的线材部分长度逐步增加,从而使得与矩形块滑动连接的滑块逐步下移,则栽培盆上的草莓果实也逐步下移。
16、相比现有技术,本发明的有益效果为:
17、1、本发明中步进电机的动力驱动传送带均速运转,同步带动各个栽培盆运转,使得各个栽培盆均能够接近采摘人员,使得采摘人员停留在一处固定方位即可对各个草莓植株上的果实采摘,方便省力,同时也避免在大棚内布置采摘人员围绕栽培支架走动的区域,更加有效地利用大棚内空间。
18、2、本发明中在支撑板设置齿块以及在栽培盆设置具有齿槽的固定环,使得栽培盆在运转时,会同步自转,使得生长在栽培盆各处的草莓果实发生旋转,从而使得原先远离采摘人员的草莓果实因自转而逐步由远及近,便于采摘人员的采摘工作。
19、3、本发明中可通过伺服电机调控收卷轴的正反转,从而控制收卷轴对线材的收卷和放松,当收卷轴放松时,位于开口外的线材部分长度逐步增加,从而使得与矩形块滑动连接的滑块逐步下移,则栽培盆上的草莓果实也逐步下移,便于采摘人员的采摘工作。
技术特征:
1.自动化立体种植系统,其特征在于,包括两个辊筒(4),两个所述辊筒(4)之间相对固定,在两个辊筒(4)之间设置一个传送带(5),其中一个所述辊筒(4)设置动力机构,可驱动所述传送带(5)运转,所述传送带(5)四周设置多个用于培育草莓的栽培盆(8),随着所述传送带(5)的运转,可使得各个具有草莓的栽培盆(8)跟随同步运转。
2.根据权利要求1所述的自动化立体种植系统,其特征在于,所述种植系统还包括底板(1),所述底板(1)上固定连接多个立板(2),多个所述立板(2)的上端均固定连接同一个支撑板(3),所述支撑板(3)的两端均为半圆形形状,两个所述辊筒(4)对称设置在所述支撑板(3)上,所述传送带(5)不超出所述支撑板(3)的边缘,在所述传送带(5)上粘接多个矩形块(6),所述矩形块(6)与所述支撑板(3)贴合,为所述矩形块(6)提供足够支撑,所述矩形块(6)设置第一连接块(7),所述第一连接块(7)与所述栽培盆(8)连接设置。
3.根据权利要求2所述的自动化立体种植系统,其特征在于,在所述底板(1)上转动连接两个转轴(9),两个所述转轴(9)分别对应于两个所述辊筒(4),所述转轴(9)向上延伸并依次贯穿所述支撑板(3)以及所述辊筒(4),所述转轴(9)与所述辊筒(4)同轴心固定连接,在所述底板(1)上安装步进电机(10),在所述步进电机(10)的输出轴以及其中一个所述转轴(9)外壁上均固定连接齿轮(11),两个所述齿轮(11)之间相互啮合连接。
4.根据权利要求3所述的自动化立体种植系统,其特征在于,所述第一连接块(7)开设圆槽(12),所述圆槽(12)底部固定连接支撑环(13),圆形的所述栽培盆(8)置于所述圆槽(12)内,并由所述支撑环(13)支撑,所述栽培盆(8)底部具有透气孔(14),所述第一连接块(7)从中间剖开,形成上下两个独立结构,所述栽培盆(8)外壁固定连接固定环(15),所述固定环(15)位于所述第一连接块(7)剖开处,所述固定环(15)外缘等距开设多个齿槽(16),并围绕所述固定环(15)一周,所述支撑板(3)外缘密集排布多个齿块(17),所述支撑板(3)外缘和所述固定环(15)之间啮合连接,所述第一连接块(7)还设置一个连接板(18),所述连接板(18)的两端分别与所述第一连接块(7)的上下两个独立结构固定连接。
5.根据权利要求4所述的自动化立体种植系统,其特征在于,所述第一连接块(7)下方设置第二连接块(19),所述第二连接块(19)开设矩形槽(20),用于种植食用菌,所述第一连接块(7)开设两个限位槽(21),所述第二连接块(19)固定连接两个限位块(22),所述限位槽(21)和所述限位块(22)的截面均为“t”型形状,所述限位槽(21)与所述限位块(22)之间滑动连接。
6.根据权利要求5所述的自动化立体种植系统,其特征在于,所述支撑板(3)上固定连接两个长板(23),两个所述长板(23)均与所述传送带(5)内圈贴合,两个所述长板(23)还固定连接闭环体(24),所述闭环体(24)与传送带(5)形状相同且位于所述传送带(5)上方,在所述闭环体(24)设置多个可滑动的球体(25),所述闭环体(24)开设围绕所述闭环体(24)一圈的球槽(26),所述球体(25)扣合在所述球槽(26)内并可在所述球槽(26)内滑动,所述球体(25)的数量与所述栽培盆(8)数量相同,在所述球体(25)和所述矩形块(6)之间设置一个倾斜排布的线材(27)。
7.根据权利要求6所述的自动化立体种植系统,其特征在于,所述矩形块(6)靠近所述第一连接块(7)的一端并开设“凸”字型槽口(28),所述第一连接块(7)固定连接“凸”字型滑块(29),所述滑块(29)与所述槽口(28)滑动连接,所述线材(27)分割为两部分,分别为第一部分和第二部分,第一部分的一端与所述球体(25)连接,另一端连接收卷部件,第二部分的一端与所述滑块(29)连接,另一端与收卷部件连接,所述收卷部件可以调控所述线材(27)的第二部分伸出的长度,从而控制所述滑块(29)上下移动。
8.根据权利要求7所述的自动化立体种植系统,其特征在于,所述收卷部件包括一个圆形块(30)和与圆形块(30)固定相连的方形块(31),所述圆形块(30)具有圆形腔室(32),所述圆形腔室(32)内设置可旋转的收卷轴(33),所述收卷轴(33)与所述圆形块(30)同轴心连接,所述方形块(31)安装伺服电机(34),所述伺服电机(34)的输出轴与所述收卷轴(33)的一端固定连接,可通过所述伺服电机(34)调控所述收卷轴(33)的正反转,所述圆形块(30)还开设一个开口(35),所述开口(35)与所述圆形腔室(32)连通,所述线材(27)的第二部分的一端伸入所述开口(35)并与所述收卷轴(33)外壁连接,所述收卷轴(33)的正反转控制所述线材(27)第二部分的收卷与放松。
9.根据权利要求8所述的自动化立体种植系统的应用,其特征在于,包括以下步骤:
技术总结
本发明公开了自动化立体种植系统,包括两个辊筒,两个所述辊筒之间相对固定,在两个辊筒之间设置一个传送带,其中一个所述辊筒设置动力机构,可驱动所述传送带运转,所述传送带四周设置多个用于培育草莓的栽培盆,随着所述传送带的运转,可使得各个具有草莓的栽培盆跟随同步运转,所述种植系统还包括底板,所述底板上固定连接多个立板。本发明中步进电机的动力驱动传送带均速运转,同步带动各个栽培盆运转,使得各个栽培盆均能够接近采摘人员,使得采摘人员停留在一处固定方位即可对各个草莓植株上的果实采摘,方便省力,同时也避免在大棚内布置采摘人员围绕栽培支架走动的区域,更加有效地利用大棚内空间。
技术研发人员:孙军,杨利娟,姜兴旺,王俊梅
受保护的技术使用者:宁夏启旭农业科技发展有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!