一种轨道式番茄自动采摘装置
本发明涉及番茄采摘,特别涉及一种轨道式番茄自动采摘装置。
背景技术:
1、番茄采摘装置是一种用于自动或半自动采摘番茄的机械设备,该装置可以减轻劳动力,提高采摘效率,减少劳动成本,并减少人工采摘的劳动强度。
2、以往的采摘装置存在以下缺点:1、不具备能方便在长距离方向上进行水平移动的轨道结构,在采集时的效率不够高。为此,我们提出一种轨道式番茄自动采摘装置。
技术实现思路
1、本发明的主要目的在于提供一种轨道式番茄自动采摘装置,可以有效解决背景技术中的问题。
2、为实现上述目的,本发明采取的技术方案为:
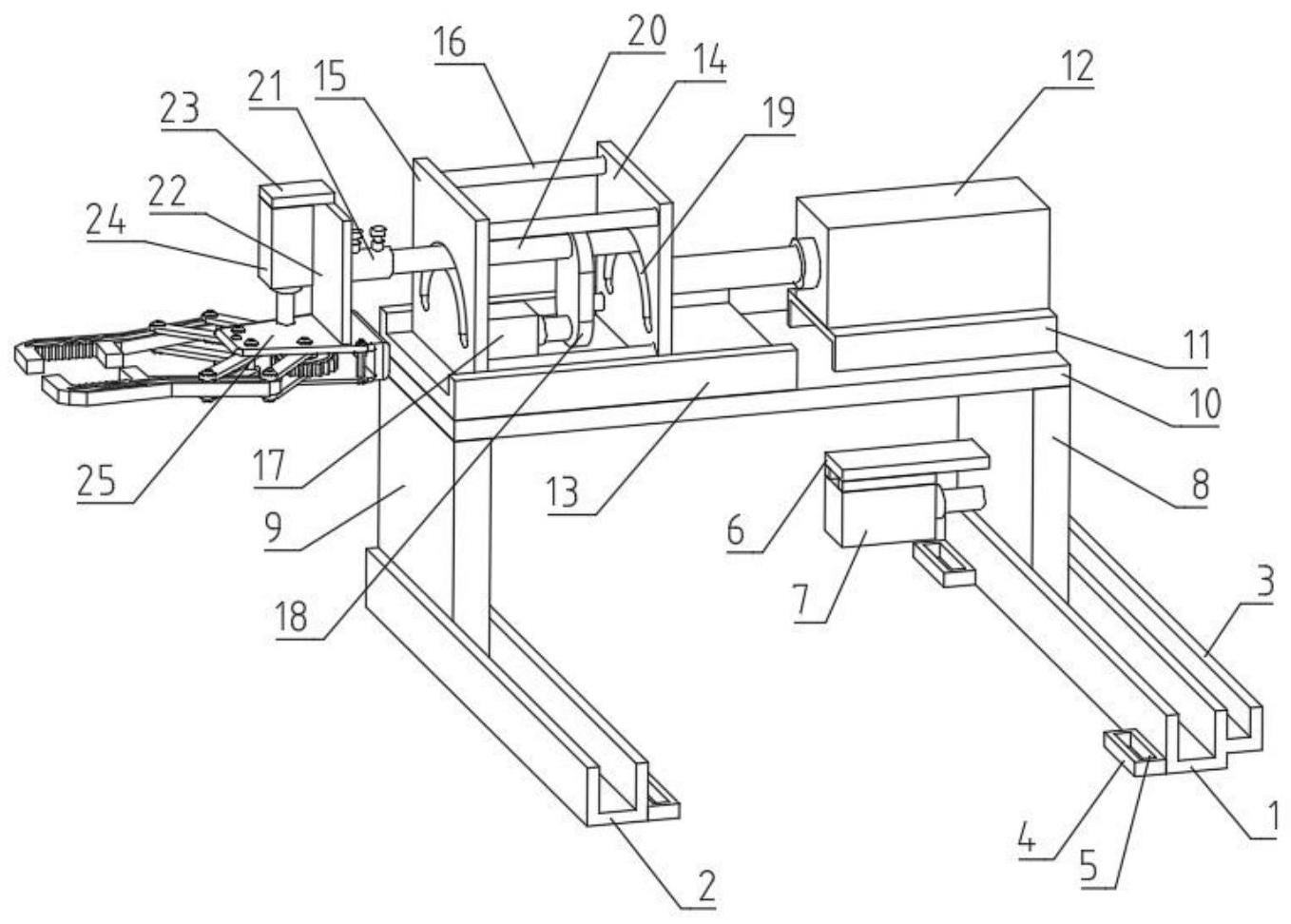
3、一种轨道式番茄自动采摘装置,包括第一滑轨、第二滑轨、伺服电缸、第二伺服电机、转动块、转动柱、立板、剪刀式机械手,所述第一滑轨和第二滑轨内分别设置有第一滑动板和第二滑动板,所述第一滑动板内壁焊接有延伸板,所述延伸板底部通过安装架设置有第一伺服电机,所述第一伺服电机的动力输出端贯穿所述第一滑动板且连接有转轮,所述第一滑轨一端设置有副轨,所述转轮底端位于副轨内,所述第一滑动板和第二滑动板顶部焊接有横板,所述横板顶部一端通过安装座设置有伺服电缸,所述伺服电缸的动力输出端连接有第一竖板,所述第一竖板一端通过连接柱连接有第二竖板,所述第二竖板内壁靠近底部处通过固定槽设置有第二伺服电机,所述第二伺服电机的动力输出端连接有转动块,所述转动块顶端一侧通过预留槽设置有转动柱,所述转动柱端部通过螺钉固定有套块,所述套块一端焊接有立板,所述立板底部连接有剪刀式机械手。
4、进一步地,所述第一竖板和第二竖板一端贯穿开设有导槽,所述转动柱位于导槽内,通过导槽对转动柱的限位作用,可以有效提升转动柱在转动时的稳定性。
5、进一步地,所述立板顶部连接有顶板,所述顶板底部通过固定座设置有第三伺服电机,所述第三伺服电机的输出轴与所述剪刀式机械手的动力输入端连接。
6、进一步地,所述横板顶部远离所述安装座一端处设置有限位导轨,所述第一竖板和第二竖板底端均位于限位导轨内,通过限位导轨对第一竖板和第二竖板的限位导向作用,可以有效提升第一竖板和第二竖板在水平移动时的稳定性。
7、进一步地,所述第一滑轨和第二滑轨内侧靠近两端处均设置有条形块,所述条形块顶部贯穿开设有安装槽。
8、进一步地,所述第一滑轨和第二滑轨均为钢材料制成,钢材料制成的第一滑轨和第二滑轨均具备良好的强度和耐腐蚀效果,在使用时的耐用效果好。
9、进一步地,所述剪刀式机械手的驱动方式为齿轮啮合驱动。
10、与现有技术相比,本发明具有如下有益效果:
11、1.本发明一种轨道式番茄自动采摘装置,通过外部螺栓穿过安装槽,方便将第一滑轨和第二滑轨固定在地面上,通过多组第一滑轨和第二滑轨,在地面上形成一组较长的滑轨,第一伺服电机、伺服电缸、第二伺服电机和第三伺服电机均连接外部电源进行使用,第一伺服电机在工作时动力输出端带动转轮转动,利用转轮在副轨内的滑动,方便带动第一滑动板、第二滑动板和横板水平移动,本采摘装置具备能方便在长距离方向上进行水平移动的轨道结构,在采集时的效率大大提升。
技术特征:
1.一种轨道式番茄自动采摘装置,包括第一滑轨(1)、第二滑轨(2)、伺服电缸(12)、第二伺服电机(17)、转动块(18)、转动柱(20)、立板(22)、剪刀式机械手(25),其特征在于:所述第一滑轨(1)和第二滑轨(2)内分别设置有第一滑动板(8)和第二滑动板(9),所述第一滑动板(8)内壁焊接有延伸板(6),所述延伸板(6)底部通过安装架设置有第一伺服电机(7),所述第一伺服电机(7)的动力输出端贯穿所述第一滑动板(8)且连接有转轮(26),所述第一滑轨(1)一端设置有副轨(3),所述转轮(26)底端位于副轨(3)内,所述第一滑动板(8)和第二滑动板(9)顶部焊接有横板(10),所述横板(10)顶部一端通过安装座(11)设置有伺服电缸(12),所述伺服电缸(12)的动力输出端连接有第一竖板(14),所述第一竖板(14)一端通过连接柱(16)连接有第二竖板(15),所述第二竖板(15)内壁靠近底部处通过固定槽设置有第二伺服电机(17),所述第二伺服电机(17)的动力输出端连接有转动块(18),所述转动块(18)顶端一侧通过预留槽设置有转动柱(20),所述转动柱(20)端部通过螺钉固定有套块(21),所述套块(21)一端焊接有立板(22),所述立板(22)底部连接有剪刀式机械手(25)。
2.根据权利要求1所述的一种轨道式番茄自动采摘装置,其特征在于:所述第一竖板(14)和第二竖板(15)一端贯穿开设有导槽(19),所述转动柱(20)位于导槽(19)内。
3.根据权利要求1所述的一种轨道式番茄自动采摘装置,其特征在于:所述立板(22)顶部连接有顶板(23),所述顶板(23)底部通过固定座设置有第三伺服电机(24),所述第三伺服电机(24)的输出轴与所述剪刀式机械手(25)的动力输入端连接。
4.根据权利要求1所述的一种轨道式番茄自动采摘装置,其特征在于:所述横板(10)顶部远离所述安装座(11)一端处设置有限位导轨(13),所述第一竖板(14)和第二竖板(15)底端均位于限位导轨(13)内。
5.根据权利要求1所述的一种轨道式番茄自动采摘装置,其特征在于:所述第一滑轨(1)和第二滑轨(2)内侧靠近两端处均设置有条形块(4),所述条形块(4)顶部贯穿开设有安装槽(5)。
6.根据权利要求1所述的一种轨道式番茄自动采摘装置,其特征在于:所述第一滑轨(1)和第二滑轨(2)均为钢材料制成。
7.根据权利要求1所述的一种轨道式番茄自动采摘装置,其特征在于:所述剪刀式机械手(25)的驱动方式为齿轮啮合驱动。
技术总结
本发明公开了一种轨道式番茄自动采摘装置,包括第一滑轨、第二滑轨、伺服电缸、第二伺服电机、转动块、转动柱、立板、剪刀式机械手,所述第一滑轨和第二滑轨内分别设置有第一滑动板和第二滑动板,所述第一滑动板内壁焊接有延伸板,所述延伸板底部通过安装架设置有第一伺服电机,所述第一伺服电机的动力输出端贯穿所述第一滑动板且连接有转轮,所述第一滑轨一端设置有副轨,所述转轮底端位于副轨内,所述第一滑动板和第二滑动板顶部焊接有横板,所述横板顶部一端通过安装座设置有伺服电缸。该发明具备能方便在长距离方向上进行水平移动的轨道结构,在采集时的效率大大提升,适合广泛推广使用。
技术研发人员:赵汐璇,郭光京
受保护的技术使用者:北京林业大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!