一种自走式植物保护机器人的制作方法
本发明属于农业设备,具体涉及一种自走式植物保护机器人。
背景技术:
1、现有大棚葡萄的种植中,葡萄由于通风、阳光的照射不均匀、梅雨天气等情况,会造成葡萄生病,生病的葡萄颜色为黄绿色或者青色、摸起来不紧实、吃起来没有味道只有水份,此类病易传染给生长好的普通,由于大棚里面的葡萄也比较多,仅人工进行养护比较费时费力,针对此类葡萄的病情,设计了一款自走式植物保护机器人;
2、现有植物保护机器人对葡萄的表面喷洒药物时,还不具备精准的喷洒,针对此结构进行了改进。
技术实现思路
1、本发明提供了一种自走式植物保护机器人,具有对生病葡萄针对性的养护,多方位多角度细致的喷洒药物,进行治疗的特点。
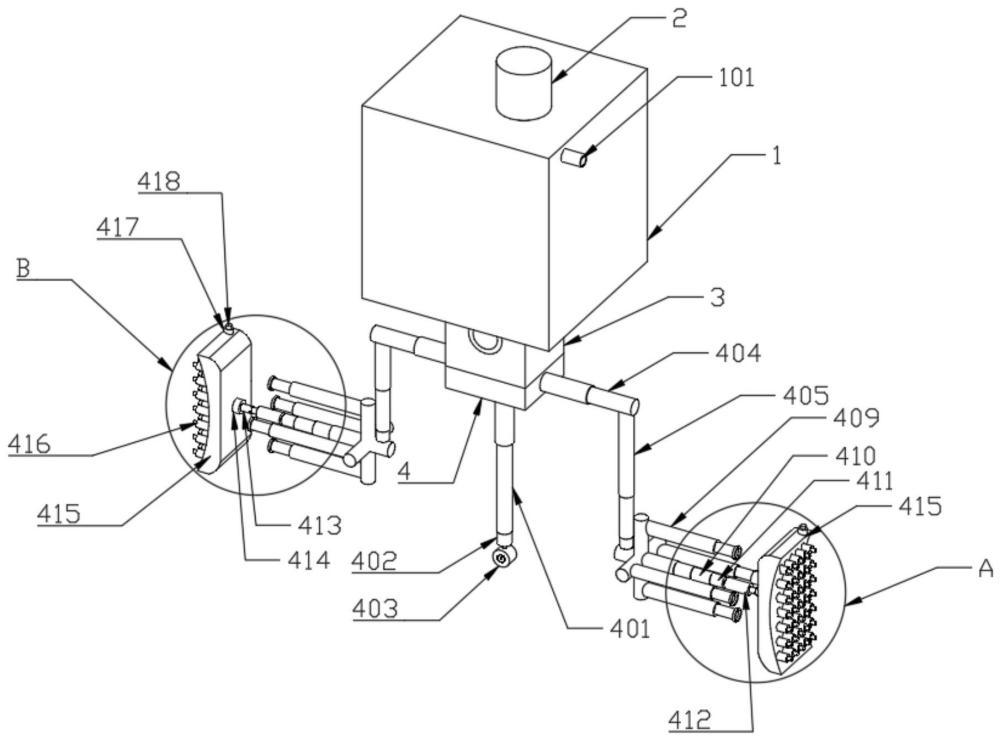
2、本发明提供如下技术方案:一种自走式植物保护机器人,包括机器人,所述机器人包括储水箱,所述储水箱的顶端螺纹连接有配药盒,所述储水箱的底端固定安设有驱动块,所述驱动块的底端固定安设有连接底盘,所述连接底盘的底部设置有摄像模块,所述连接底盘的两侧对称安设有伸缩杆二号、伸缩杆三号、微型电机二号连接杆一、连接杆二、伸缩杆四号、伸缩杆五号、微型电机三号、伸缩杆六号、滚珠万向旋转连接结构、连接块、喷药头、喷水口、压力泵、水管连接头、红外距离传感器、摄像模块,所述喷药头的喷洒边为弧形结构,且所述喷药头可360°转动调节喷洒方向,便于对葡萄的多角度的喷洒,精细喷药。
3、所述储水箱的一侧安设有注水口,所述储水箱的底端两侧分别安设有水管连接头一、水管连接头二,所述配药盒与储水箱的连接处还设置有电磁阀,便于自动下料;通过注水口连接水管进行对储水箱内部注水,水管连接头一、水管连接头二分别连接水管与两个水管连接头连接,便于喷水用。
4、所述驱动块的中部前后贯通开设有驱动孔,所述驱动孔与大棚内部安设的螺杆啮合设置,所述螺杆两端分别安设有主动电机与从动转轴,且主动电机、机器人均与主控设备电性连接;主控设备根据阈值时间,操控机器人对植物的检测及养护。
5、所述连接底盘的底端固定连接伸缩杆一号的一端,所述伸缩杆一号的另一端连接微型电机一号的一端,所述微型电机一号的另一端动子轴固定连接摄像模块;通过伸缩杆一号伸长收缩调节摄像模块的上下高度,通过微型电机一号带动摄像模块旋转,多方位的对葡萄的状态拍摄采集,传送到主控设备进行分析,当根据葡萄的生长时间及颜色的分析对比,判断葡萄的生病情况与原因,控制机器人对葡萄精细的喷药处理。
6、所述伸缩杆二号、伸缩杆三号分别便于对葡萄远近与高低的养护辅助设置,所述伸缩杆三号的底端固定安设有微型电机二号的一端,所述微型电机二号的另一端动子轴固定连接连接杆一的顶部,所述连接杆一的一端固定连接连接杆二。
7、所述连接杆二为十字架结构,所述连接杆二的中部固定连接伸缩杆五号的一端,所述伸缩杆五号的另一端固定连接微型电机三号的一端,所述微型电机三号的另一端动子轴固定连接伸缩杆六号的一端,所述伸缩杆六号的另一端为球形结构,且球形结构转动连接滚珠万向旋转连接结构的一端,所述滚珠万向旋转连接结构的另一端固定连接连接块,所述连接块与喷药头后侧固定连接。
8、所述滚珠万向旋转连接结构的一端为中空结构,所述伸缩杆六号的球形结构卡设在滚珠万向旋转连接结构中空结构内部;当需要进行对喷药头的倾斜角度进行微调时,通过伸缩杆四号可推动喷药头调节。
9、所述连接杆二的四根杆体上均分别固定连接伸缩杆四号的一端,所述伸缩杆四号的另一端固定设置有硬质橡胶环。
10、所述喷药头后侧安设有压力泵、水管连接头,所述喷药头前侧安设有若干排喷水口及若干个红外距离传感器、摄像模块。
11、所述红外距离传感器与摄像模块以上下左右及中部的方式安设;方便多角度的拍摄及多方位的距离调节,通过红外距离传感器与葡萄之间的距离检测,喷水口喷洒距离范围在3-8cm。
12、本发明的有益效果是:当出现葡萄一侧被遮挡时,通过微型电机三号微调节喷药头与叶片的遮挡面平行设置,再通过与叶片的对立面的伸缩杆四号轻微推动喷药头,结合红外距离传感器与摄像模块的检测进行对喷药头的调节,同时通过红外距离传感器检测喷洒距离,调节水泵的压力,对葡萄精确喷药,针对有叶片遮挡的葡萄喷药,首喷的角度均与叶片平行,同时为侧面喷洒,从其他角度喷洒会出现与叶片粘连,影响后续喷洒的精确度;
13、当需要对浇灌时,通过设置微型电机二号带动整个喷洒头,旋转,也可以调节距离对植物,一边同时喷洒或者两边分别进行浇灌。
14、该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
技术特征:
1.一种自走式植物保护机器人,其特征在于:包括机器人,所述机器人包括储水箱(1),所述储水箱(1)的顶端螺纹连接有配药盒(2),所述储水箱(1)的底端固定安设有驱动块(3),所述驱动块(3)的底端固定安设有连接底盘(4),所述连接底盘(4)的底部设置有摄像模块(403),所述连接底盘(4)的两侧对称安设有伸缩杆二号(404)、伸缩杆三号(405)、微型电机二号(406)连接杆一(407)、连接杆二(408)、伸缩杆四号(409)、伸缩杆五号(410)、微型电机三号(411)、伸缩杆六号(412)、滚珠万向旋转连接结构(413)、连接块(414)、喷药头(415)、喷水口(416)、压力泵(417)、水管连接头(418)、红外距离传感器(419)、摄像模块(420),所述喷药头(415)的喷洒边为弧形结构,且所述喷药头(415)可360°转动调节喷洒方向,便于对葡萄的多角度的喷洒,精细喷药。
2.根据权利要求1所述的一种自走式植物保护机器人,其特征在于:所述储水箱(1)的一侧安设有注水口(101),所述储水箱(1)的底端两侧分别安设有水管连接头一(102)、水管连接头二(103),所述配药盒(2)与储水箱(1)的连接处还设置有电磁阀,便于自动下料。
3.根据权利要求1所述的一种自走式植物保护机器人,其特征在于:所述驱动块(3)的中部前后贯通开设有驱动孔(301),所述驱动孔(301)与大棚内部安设的螺杆啮合设置,所述螺杆两端分别安设有主动电机与从动转轴,且主动电机、机器人均与主控设备电性连接。
4.根据权利要求1所述的一种自走式植物保护机器人,其特征在于:所述连接底盘(4)的底端固定连接伸缩杆一号(401)的一端,所述伸缩杆一号(401)的另一端连接微型电机一号(402)的一端,所述微型电机一号(402)的另一端动子轴固定连接摄像模块(403)。
5.根据权利要求1所述的一种自走式植物保护机器人,其特征在于:所述伸缩杆二号(404)、伸缩杆三号(405)分别便于对葡萄远近与高低的养护辅助设置,所述伸缩杆三号(405)的底端固定安设有微型电机二号(406)的一端,所述微型电机二号(406)的另一端动子轴固定连接连接杆一(407)的顶部,所述连接杆一(407)的一端固定连接连接杆二(408)。
6.根据权利要求5所述的一种自走式植物保护机器人,其特征在于:所述连接杆二(408)为十字架结构,所述连接杆二(408)的中部固定连接伸缩杆五号(410)的一端,所述伸缩杆五号(410)的另一端固定连接微型电机三号(411)的一端,所述微型电机三号(411)的另一端动子轴固定连接伸缩杆六号(412)的一端,所述伸缩杆六号(412)的另一端为球形结构,且球形结构转动连接滚珠万向旋转连接结构(413)的一端,所述滚珠万向旋转连接结构(413)的另一端固定连接连接块(414),所述连接块(414)与喷药头(415)后侧固定连接。
7.根据权利要求6所述的一种自走式植物保护机器人,其特征在于:所述滚珠万向旋转连接结构(413)的一端为中空结构,所述伸缩杆六号(412)的球形结构卡设在滚珠万向旋转连接结构(413)中空结构内部。
8.根据权利要求6所述的一种自走式植物保护机器人,其特征在于:所述连接杆二(408)的四根杆体上均分别固定连接伸缩杆四号(409)的一端,所述伸缩杆四号(409)的另一端固定设置有硬质橡胶环。
9.根据权利要求6所述的一种自走式植物保护机器人,其特征在于:所述喷药头(415)后侧安设有压力泵(417)、水管连接头(418),所述喷药头(415)前侧安设有若干排喷水口(416)及若干个红外距离传感器(419)、摄像模块(420)。
10.根据权利要求9所述的一种自走式植物保护机器人,其特征在于:所述红外距离传感器(419)与摄像模块(420)以上下左右及中部的方式安设;方便多角度的拍摄及多方位的距离调节,通过红外距离传感器(419)与葡萄之间的距离检测,喷水口(416)喷洒距离范围在3-8cm。
技术总结
本发明属于农业设备技术领域,尤其为一种自走式植物保护机器人,包括机器人,所述机器人包括储水箱,所述储水箱的顶端螺纹连接有配药盒,所述储水箱的底端固定安设有驱动块,所述驱动块的底端固定安设有连接底盘,所述连接底盘的底部设置有摄像模块,具有对生病葡萄针对性的养护,多方位多角度细致的喷洒药物,进行治疗的特点;当需要对浇灌时,通过设置微型电机二号带动整个喷洒头,旋转,也可以调节距离对植物,一边同时喷洒或者两边分别进行浇灌。
技术研发人员:耿坚
受保护的技术使用者:耿坚
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!