智能挖红薯机器人的制作方法
本发明涉及红薯种植,具体为智能挖红薯机器人。
背景技术:
1、红薯是很重要的食材同时也是优质淀粉制作的主要材料,将红薯切条,晒干,做成地瓜干,是非常美味的食品,除供食用外,还可以制糖和酿酒、制酒精。但是,红薯在挖掘过程中不可避免会带上土壤,需要尽可能地分离,从而避免土壤的流失和后期的清理工作量。目前的大部分的红薯挖掘收获装置的土壤-红薯分离效果都不是很好,土壤粘接较多,给红薯的收获带来不便。
技术实现思路
1、本发明的目的在于提供智能挖红薯机器人,以解决上述背景技术中提出的问题。
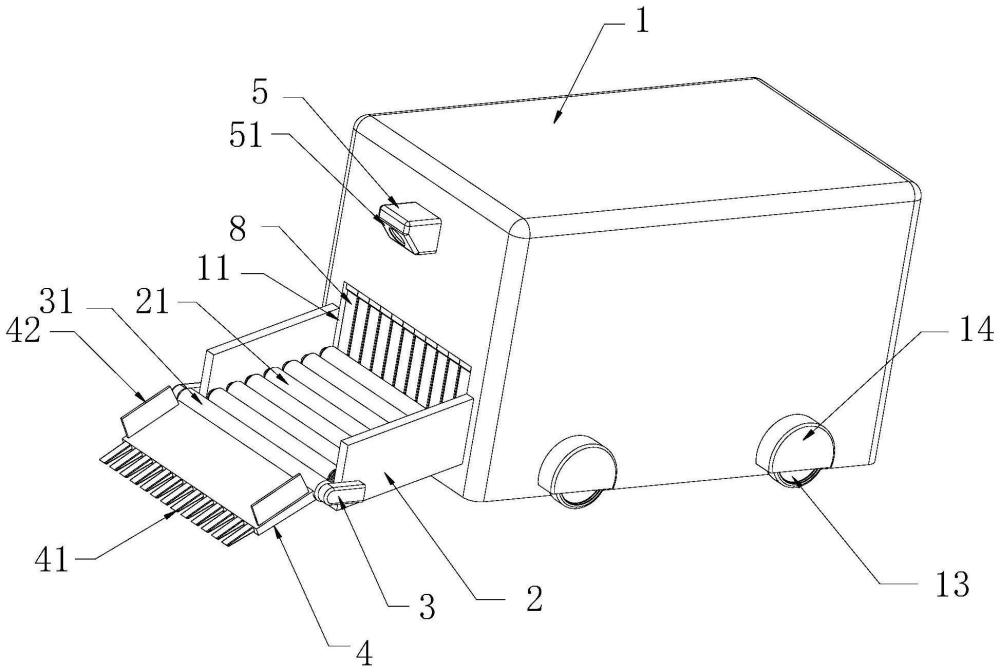
2、为实现上述目的,本发明提供如下技术方案:智能挖红薯机器人,包括料箱、输送板、挖掘板、辅助辊以及振动板,所述料箱整体呈方形结构,所述料箱内部中空,在料箱的两端分别设置有进料口、出料口;所述输送板安装在料箱设置有进料口的一侧,所述输送板整体呈u型结构,在输送板中安装有输送辊;所述挖掘板安装在输送板的端部,且挖掘板的端部设置有挖刀;所述辅助辊、振动板均设置在料箱内部,且辅助辊设置在振动板的上部;所述振动板两端分别贴着进料口、出料口设置,所述振动板上设置有用于漏出振动脱落土壤的落土孔,所述辅助辊上设置有用于推动红薯的推杆,推杆将振动板上的红薯从进料口向出料口推动。
3、优选的,所述输送板呈u型结构,所述进料口处于输送板的u型结构内侧;所述输送板整体倾斜向下设置,在输送板的u型结构内侧设置有若干根输送辊,所述输送辊由输送电机驱动,若干根输送辊沿着输送板的长度方向并排设置;所述输送板的u型底板设置有清理孔,所述清理孔设置为条形通孔,且均匀设置有多组。
4、优选的,所述输送板远离料箱的一端设置有旋转座,所述旋转座之间设置有换向轴;所述挖掘板一端固定在换向轴上,所述换向轴由换向电机驱动。
5、优选的,所述挖刀呈锥形结构,且挖刀沿着挖掘板的端部并排设置有多组;所述挖掘板上部并排设置有限位板,所述限位板贴着挖掘板的边沿设置。
6、优选的,所述料箱设置有进料口的一侧设置有监控盒,所述监控盒朝向输送板的方向设置有倾斜的监控面,所述监控面内镶嵌有数字摄像头。
7、优选的,所述振动板呈u型结构,振动板的u型开口分别朝向进料口、出料口设置;所述落土孔设置为条形通孔,所述落土孔设置在振动板的u型底板上;所述振动板两侧与料箱内壁之间留有缝隙,在振动板下部的四个边角处分别设置有振动台,所述振动台侧面嵌套在安装座中,所述安装座与料箱内壁固定连接;所述安装座内部设置有振动电机。
8、优选的,所述推杆呈v字型结构,且推杆的底端由弧形结构相连,推杆整体采用橡胶材料制成,推杆的两端与辅助辊相连;所述推杆在辅助辊上均匀设置有多组。
9、优选的,所述辅助辊两端安装在悬吊架上,所述悬吊架呈倒u型结构,辅助辊由辅助电机驱动;所述悬吊架的上部对称固定有收缩杆,所述收缩杆的顶端嵌套在套筒中,并与套筒内的电动推杆相连,所述套筒吊装在料箱的箱顶上。
10、优选的,所述料箱下部设置为镂空式结构,且在料箱下部设置有挡网。
11、优选的,所述料箱两侧设置有驱动电机驱动的移动轮,在移动轮的外侧设置有防护罩;所述进料口、出料口中分别设置有挡帘。
12、与现有技术相比,本发明的有益效果是:本发明所提供的挖掘机器人,能够实现红薯的挖掘,并且在红薯的输送过程中,经过充分的振动来分离红薯上的土壤;红薯在振动过程中通过辅助辊的配合来移动,最终从出料口排出,从而提高红薯的收获效率。
技术特征:
1.智能挖红薯机器人,其特征在于:包括料箱(1)、输送板(2)、挖掘板(4)、辅助辊(6)以及振动板(7),所述料箱(1)整体呈方形结构,所述料箱(1)内部中空,在料箱(1)的两端分别设置有进料口(11)、出料口(12);所述输送板(2)安装在料箱(1)设置有进料口(11)的一侧,所述输送板(2)整体呈u型结构,在输送板(2)中安装有输送辊(21);所述挖掘板(4)安装在输送板(2)的端部,且挖掘板(4)的端部设置有挖刀(41);所述辅助辊(6)、振动板(7)均设置在料箱(1)内部,且辅助辊(6)设置在振动板(7)的上部;所述振动板(7)两端分别贴着进料口(11)、出料口(12)设置,所述振动板(7)上设置有用于漏出振动脱落土壤的落土孔(71),所述辅助辊(6)上设置有用于推动红薯的推杆(61),推杆(61)将振动板(7)上的红薯从进料口(11)向出料口(12)推动。
2.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述输送板(2)呈u型结构,所述进料口(11)处于输送板(2)的u型结构内侧;所述输送板(2)整体倾斜向下设置,在输送板(2)的u型结构内侧设置有若干根输送辊(21),所述输送辊(21)由输送电机驱动,若干根输送辊(21)沿着输送板(2)的长度方向并排设置;所述输送板(2)的u型底板设置有清理孔(22),所述清理孔(22)设置为条形通孔,且均匀设置有多组。
3.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述输送板(2)远离料箱(1)的一端设置有旋转座(3),所述旋转座(3)之间设置有换向轴(31);所述挖掘板(4)一端固定在换向轴(31)上,所述换向轴(31)由换向电机驱动。
4.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述挖刀(41)呈锥形结构,且挖刀(41)沿着挖掘板(4)的端部并排设置有多组;所述挖掘板(4)上部并排设置有限位板(42),所述限位板(42)贴着挖掘板(4)的边沿设置。
5.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述料箱(1)设置有进料口(11)的一侧设置有监控盒(5),所述监控盒(5)朝向输送板(2)的方向设置有倾斜的监控面(51),所述监控面(51)内镶嵌有数字摄像头。
6.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述振动板(7)呈u型结构,振动板(7)的u型开口分别朝向进料口(11)、出料口(12)设置;所述落土孔(71)设置为条形通孔,所述落土孔(71)设置在振动板(7)的u型底板上;所述振动板(7)两侧与料箱(1)内壁之间留有缝隙,在振动板(7)下部的四个边角处分别设置有振动台(72),所述振动台(72)侧面嵌套在安装座(73)中,所述安装座(73)与料箱(1)内壁固定连接;所述安装座(73)内部设置有振动电机。
7.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述推杆(61)呈v字型结构,且推杆(61)的底端由弧形结构相连,推杆(61)整体采用橡胶材料制成,推杆(61)的两端与辅助辊(6)相连;所述推杆(61)在辅助辊(6)上均匀设置有多组。
8.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述辅助辊(6)两端安装在悬吊架(9)上,所述悬吊架(9)呈倒u型结构,辅助辊(6)由辅助电机驱动;所述悬吊架(9)的上部对称固定有收缩杆(92),所述收缩杆(92)的顶端嵌套在套筒(91)中,并与套筒(91)内的电动推杆相连,所述套筒(91)吊装在料箱(1)的箱顶上。
9.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述料箱(1)下部设置为镂空式结构,且在料箱(1)下部设置有挡网。
10.根据权利要求1所述的智能挖红薯机器人,其特征在于:所述料箱(1)两侧设置有驱动电机驱动的移动轮(13),在移动轮(13)的外侧设置有防护罩(14);所述进料口(11)、出料口(12)中分别设置有挡帘(8)。
技术总结
本发明涉及红薯种植技术领域,具体公开了智能挖红薯机器人,包括料箱、输送板、挖掘板、振动板以及辅助辊,所述料箱整体呈方形结构,所述料箱内部中空,在料箱的两端分别设置有进料口、出料口;所述输送板安装在料箱设置有进料口的一侧,所述输送板整体呈U型结构,在输送板中安装有输送辊;所述挖掘板安装在输送板的端部,且挖掘板的端部设置有挖刀;所述振动板、辅助辊均设置在料箱内部,且辅助辊设置在振动板的上部;所述振动板两端分别贴着进料口、出料口设置;所述振动板上设置有用于漏出振动脱落土壤的落土孔,所述辅助辊上设置有用于推动红薯的推杆,将振动板上的红薯从进料口向出料口推动;本发明能够提高红薯收获效率。
技术研发人员:于素华,申自辉,申梦婷,申慧君
受保护的技术使用者:界首市金龙机械设备有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!