自测旋耕受力的智能旋耕刀及自测方法
本发明涉及农机设备,具体地指一种自测旋耕受力的智能旋耕刀及自测方法。
背景技术:
1、旋耕刀是旋耕机的核心耕作部件,具有对土壤和秸秆进行切削破碎、搅拌混合的功能。刀具的结构参数直接影响机具的作业质量、功耗及自身的磨损和使用寿命。因为保护性耕作制度的推广以及农药化肥的大量使用,土壤的表面坚实度发生了很大改变,旋耕刀在使用过程中可能会因阻力的变化而产生崩断。且由于地域不同,土壤条件、种植制度各有差异,具有明显区域特性的旋耕作业机具也应运而生,作物的栽播条件与方式同时对机具提出了新的要求,因此需要研究刀具在切削过程中的变形、受力等规律。刀具与土壤接触,对土壤加工的同时也受到了来自土壤的反作用力,该力是研究切削过程的基础,对于指导刀具的优化设计,无论在理论上还是实际应用方面都有重要的意义,所以有必要对旋耕刀受力进行测量,实时掌握旋耕刀工作时表面压力变化。
2、目前旋耕刀的工作时受力测量是通过搭建试验台架,在旋耕刀轴上加装三向力传感器进行分析测量。该技术使用了始位感应器和转角感应器分别识别不断转动中的始位圆盘和分度圆盘上的凸起并产生脉冲信号,将三向力其各数据均与转角对应,通过相应数值运算进行坐标转换,分别得到连续转动刀辊所受三向力与刀辊转动时间和角度的关系,完成三向力的测量。另外一种自激振动式旋耕类刀片受力和振动检测装置包括振动测量模块、位姿测量模块、压力测量模块,根据处理还原的原始信号波形可以获得刀片的沿x、y、z三个空间自由度的加速度值以及绕这三个自由度旋转的角度值;进行信号分析处理后得到对应自由度方向的位移值、受力值、角度值和所受扭矩。
3、这些测量方式并不能直接测量旋耕刀受力,且采集数据过程较为复杂,而且不能实时对数据进行传输,并且三向力传感器价格昂贵,这都给旋耕刀表面压力测量带来一定难度,且传感器基本裸露在外,容易剐蹭,使用寿命不长。此外,现有的技术在实验室条件下搭建试验台架进行测试,并不能在真实工况下进行测量。因此需要设计一种成本较低、能进行无线数据传输、寿命较长的能自测旋耕受力的智能旋耕刀。
技术实现思路
1、本发明的目的就是要提供一种自测旋耕受力的智能旋耕刀及自测方法,本发明可以准确检测旋耕刀在不同作业环境下表面压力的大小,并用上位机界面显示,分析旋耕刀加强筋处在作业中的表面压力。
2、为实现此目的,本发明所设计的自测旋耕受力的智能旋耕刀,它包括旋耕刀、应变片、信号调理模块和上位机,其中,所述应变片安装在旋耕刀的刀柄加强筋开槽处,所述信号调理模块用于将应变片输出的应变电阻信号转换为对应的应变电压信号,并对应变电压信号进行预处理,上位机用于根据预处理后的应变电压信号和应变片灵敏度系数获得应变片所测应变,并根据应变片所测应变结合旋耕刀材质杨氏模量获得旋耕刀的刀柄加强筋开槽处所受应力。
3、本发明的有益效果:
4、本发明将应变片粘贴镶嵌在旋耕刀的刀柄加强筋处,通过硅橡胶进行粘贴固定并使用硅橡胶封装,能够直接测量旋耕刀加强筋处的实时表面压力,防止工作时的刮蹭,延长传感器的使用寿命。
5、本发明采用无线传感技术,减少接线数量,防止接线缠绕,能够更直接准确方便的测量旋耕刀在不同工作环境下的表面压力,解决了以往测试过程中通过测量旋耕机其他部位来间接测量旋耕刀表面所受压力而导致测试不准确的问题,以及采用三维力传感器价格昂贵的问题。
技术特征:
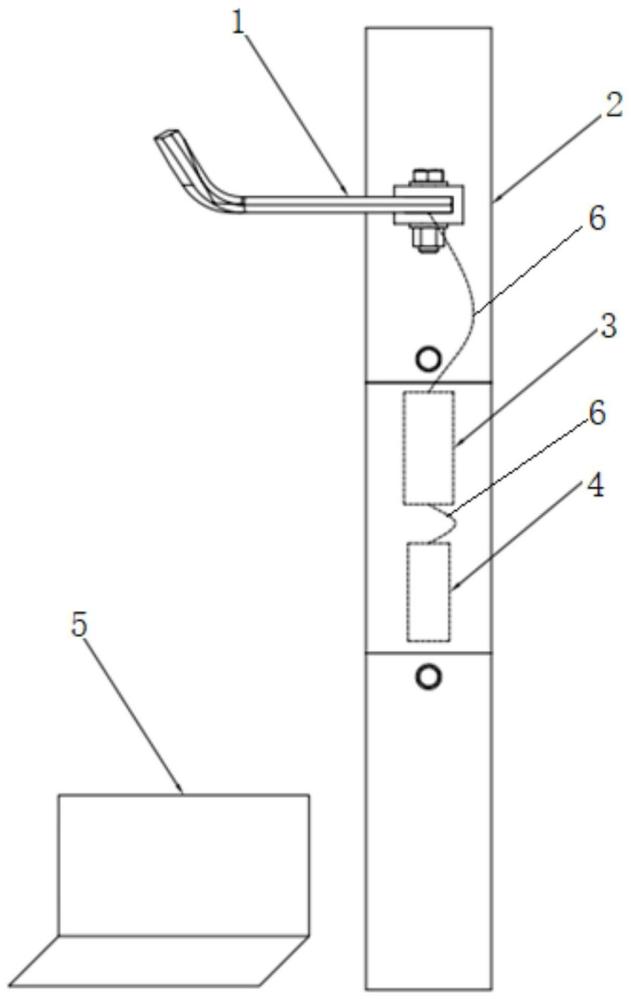
1.一种自测旋耕受力的智能旋耕刀,其特征在于:它包括旋耕刀(1)、应变片(7)、信号调理模块(3)和上位机(5),其中,所述应变片(7)安装在旋耕刀(1)的刀柄加强筋开槽处(8),所述信号调理模块(3)用于将应变片(7)输出的应变电阻信号转换为对应的应变电压信号,并对应变电压信号进行预处理,上位机(5)用于根据预处理后的应变电压信号和应变片灵敏度系数获得应变片(7)所测应变,并根据应变片(7)所测应变结合旋耕刀材质杨氏模量获得旋耕刀(1)的刀柄加强筋开槽处(8)所受应力。
2.根据权利要求1所述的自测旋耕受力的智能旋耕刀,其特征在于:所述应变片(7)粘贴镶嵌在旋耕刀(1)的刀柄加强筋开槽处(8)。
3.根据权利要求2所述的自测旋耕受力的智能旋耕刀,其特征在于:所述应变片(7)粘贴镶嵌在旋耕刀(1)的刀柄加强筋开槽处(8)的具体方法为:
4.根据权利要求1所述的自测旋耕受力的智能旋耕刀,其特征在于:所述信号调理模块(3)中的单桥电路将应变片(7)输出的应变电阻信号转换为对应的应变电压信号,所述单桥电路包括电阻r1、电阻r2、电阻r3和直流电源v,所述电阻r1的一端连接应变片(7)电阻的一端,电阻r1的另一端连接电阻r2的一端,电阻r2的另一端连接电阻r3的一端,电阻r3的另一端连接应变片(7)电阻的另一端,直流电源v的一极连接电阻r2的一端,直流电源v的另一极连接电阻r3的另一端,电阻r1的一端和电阻r2的另一端之间输出应变电压信号ve。
5.根据权利要求4所述的自测旋耕受力的智能旋耕刀,其特征在于:所述对应变电压信号ve进行预处理包括滤波和放大处理得到预处理后的应变电压信号v1,所述滤波为低通滤波。
6.根据权利要求5所述的自测旋耕受力的智能旋耕刀,其特征在于:上位机(5)根据预处理后的应变电压信号和应变片灵敏度系数获得应变片(7)所测应变的具体方法为:
7.根据权利要求1所述的自测旋耕受力的智能旋耕刀,其特征在于:根据应变片(7)所测应变结合旋耕刀材质杨氏模量获得旋耕刀(1)的刀柄加强筋开槽处(8)所受应力的具体方法为:
8.根据权利要求1所述的自测旋耕受力的智能旋耕刀,其特征在于:它还包括数据采集卡(4),所述旋耕刀(1)的刀辊(2)为分段式旋耕刀刀辊,相邻两个刀辊(2)的连接段套接,并通过螺栓将相邻两个刀辊(2)的连接段固定,所述信号调理模块(3)和数据采集卡(4)安装在刀辊(2)的内壁上,数据采集卡(4)用于采集信号调理模块(3)输出的预处理后应变电压信号,并将预处理后应变电压信号通过蓝牙通信传输给上位机(5)。
9.根据权利要求3所述的自测旋耕受力的智能旋耕刀,其特征在于:所述第二层硅橡的厚度大于第一层硅橡胶的厚度。
10.一种旋耕刀旋耕受力测试方法,其特征在于,它包括如下步骤:
技术总结
本发明公开了自测旋耕受力的智能旋耕刀,它包括旋耕刀、应变片、信号调理模块和上位机,其中,所述应变片安装在旋耕刀的刀柄加强筋开槽处,所述信号调理模块用于将应变片输出的应变电阻信号转换为对应的应变电压信号,并对应变电压信号进行预处理,上位机用于根据预处理后的应变电压信号和应变片灵敏度系数获得应变片所测应变,并根据应变片所测应变结合旋耕刀材质杨氏模量获得旋耕刀的刀柄加强筋开槽处所受应力。本发明可以准确检测旋耕刀在不同作业环境下表面压力的大小。
技术研发人员:明全元,夏进启,闫龙,戴惟羿,田逸奇,李善军,廖庆喜,万强
受保护的技术使用者:华中农业大学
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!