一种机器人工作运行方法、装置、设备及存储介质与流程
本发明涉及机器人,尤其涉及一种机器人工作运行方法、装置、设备及存储介质。
背景技术:
1、割草机器人是一种用于修剪草坪、植被等的机械工具。随着割草机器人技术的发展,能够自主割草的割草机器人受到了人们的欢迎,通常自主割草机器人配置了障碍物检测装置,当检测到障碍物时,控制割草机器人停止或避开障碍物。
2、但在割草机工作的草坪场景中,通常会有零星的高草,其高度显著高于周围的草。并且当激光雷达应用在割草机器人产品时,不具备障碍物类型的区分,会将超过一定高度的草识别为障碍物,便会进行绕障碍导致草坪漏割。
3、有鉴于此,亟需一种能够提高开荒割草效果的割草机器人工作运行方法。
4、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种机器人工作运行方法、装置、设备及存储介质,旨在解决现有技术中如何判断割草机器人能否进行开荒工作的技术问题。
2、为实现上述目的,本发明提供了一种机器人工作运行方法,所述方法包括以下步骤:
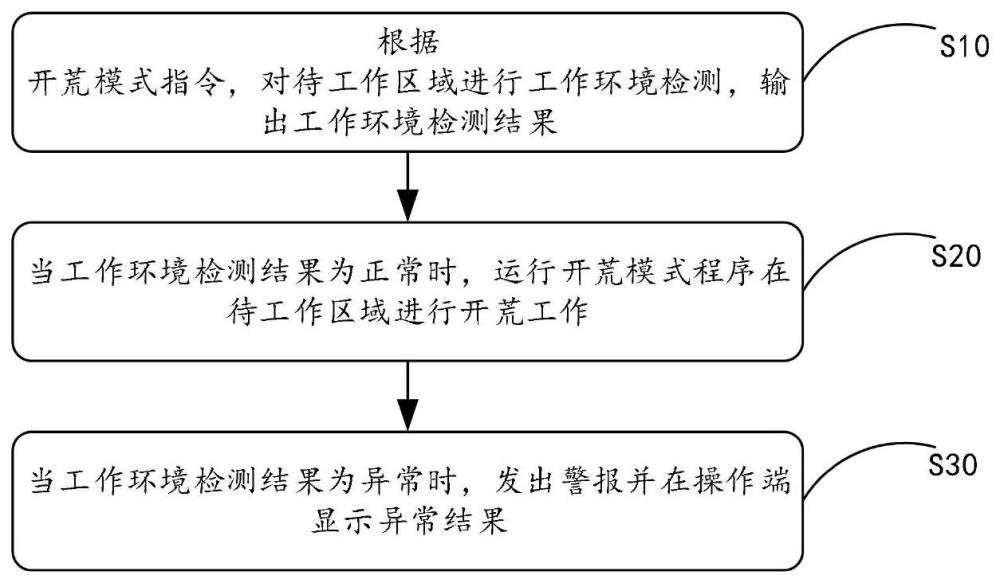
3、根据开荒模式指令,对待工作区域进行工作环境检测,输出工作环境检测结果;
4、当所述工作环境检测结果为正常时,运行开荒模式程序在所述待工作区域进行开荒工作;
5、当所述工作环境检测结果为异常时,发出警报并在操作端显示异常结果。
6、可选地,根据开荒模式指令,对待工作区域进行工作环境检测,输出工作环境检测结果,具体步骤包括:
7、接收所述开荒模式指令,使用激光雷达对所述待工作区域进行扫描,得到待工作区域的环境数据;
8、使用开荒模式算法对所述待工作区域的环境数据进行过滤识别,输出所述工作环境检测结果。
9、可选地,使用开荒模式算法对所述待工作区域的环境数据进行过滤识别,输出所述工作环境检测结果,具体过程包括:
10、使用所述开荒模式算法对所述待工作区域的环境数据进行过滤筛选,得到环境数据过滤集合;
11、当所述环境数据过滤集合中的数据个数超过预设障碍数时,所述工作环境检测结果输出为异常;
12、当所述环境数据过滤集合中的数据个数未超过预设障碍数时,所述工作环境检测结果输出为正常。
13、可选地,当所述工作环境检测结果为正常时,运行开荒模式程序在所述待工作区域进行开荒工作,具体步骤包括:
14、当所述工作环境检测结果为正常时,机器人调整运行状态并通过所述开荒模式算法对预设行进区域进行过滤筛选,得到实际行进区域图;
15、根据所述实际行进区域图进行路线规划执行所述开荒工作。
16、可选地,当所述工作环境检测结果为正常时,机器人调整运行状态并通过所述开荒模式算法对预设行进区域进行过滤筛选,得到实际行进区域图,具体步骤包括:
17、通过激光雷达对预设行进区域进行扫描,得到待行进区域的环境数据;
18、使用滤波算法对所述待行进区域的环境数据进行统计比对,得到第一障碍物分布结果;
19、使用视觉算法对所述待行进区域的环境数据进行异物障碍识别,得到第二障碍分布结果;
20、基于所述预设行进区域将所述第一障碍物分布结果和所述第二障碍分布结果进行整合,得到所述实际行进区域图。
21、可选地,使用滤波算法对所述待行进区域的环境数据进行统计比对,得到第一障碍物分布结果具体过程包括:
22、对所述待行进区域的环境数据中的各个数据点按照预设框选半径分别进行数据点框选,得到多个数据框选结果;
23、将所述多个数据框选结果逐个与预设数据点数目进行比对,得到所述第一障碍物分布结果。
24、可选地,当所述工作环境检测结果为异常时,发出警报并在操作端显示异常结果之后,还包括:
25、接收并解析异常工作指令,输出相应的指令解析结果;
26、当所述指令解析结果为所述开荒模式指令时,机器人重新启动开荒模式,并执行后续工作;
27、当所述指令解析结果为多障碍开荒指令时,机器人继续启动当前开荒模式,并执行后续工作。
28、此外,为实现上述目的,本发明还提出一种机器人工作运行装置,所述机器人工作运行装置包括:
29、指令接收模块:根据开荒模式指令,对待工作区域进行工作环境检测,输出工作环境检测结果;
30、指令执行模块:当所述工作环境检测结果为正常时,运行开荒模式程序在所述待工作区域进行开荒工作;
31、异常报警模块:当所述工作环境检测结果为异常时,发出警报并在操作端显示异常结果。
32、此外,为实现上述目的,本发明还提出一种机器人工作运行设备,所述机器人工作运行设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人工作运行程序,所述机器人工作运行程序配置为实现如上文所述的机器人工作运行方法的步骤。
33、此外,为实现上述目的,本发明还提出一种存储有计算机程序的计算机可读存储介质,所述存储介质上存储有机器人工作运行程序,所述机器人工作运行程序被处理器执行时实现如上文所述的机器人工作运行方法的步骤。
34、本发明根据开荒模式指令,对待工作区域进行工作环境检测,输出工作环境检测结果;当所述工作环境检测结果为正常时,运行开荒模式程序在所述待工作区域进行开荒工作;当所述工作环境检测结果为异常时,发出警报并在操作端显示异常结果。本发明在接收到开荒模式指令后,通过对待工作区域的检测来实现对开荒工作条件是否满足的判断,进而为割草机器人开荒模式的运行提供保障,提高了割草机器人在开荒场景的工作效率。
技术特征:
1.一种机器人工作运行方法,其特征在于,包括:
2.根据权利要求1所述的机器人工作运行方法,其特征在于,根据开荒模式指令,对待工作区域进行工作环境检测,输出工作环境检测结果,具体步骤包括:
3.根据权利要求2所述的机器人工作运行方法,其特征在于,使用开荒模式算法对所述待工作区域的环境数据进行过滤识别,输出所述工作环境检测结果,具体过程包括:
4.根据权利要求1所述的机器人工作运行方法,其特征在于,当所述工作环境检测结果为正常时,运行开荒模式程序在所述待工作区域进行开荒工作,具体步骤包括:
5.根据权利要求4所述的机器人工作运行方法,其特征在于,当所述工作环境检测结果为正常时,机器人调整运行状态并通过所述开荒模式算法对预设行进区域进行过滤筛选,得到实际行进区域图,具体步骤包括:
6.根据权利要求5所述的机器人工作运行方法,其特征在于,使用滤波算法对所述待行进区域的环境数据进行统计比对,得到第一障碍物分布结果具体过程包括:
7.根据权利要求1-6中任一项所述的机器人工作运行方法,其特征在于,当所述工作环境检测结果为异常时,发出警报并在操作端显示异常结果之后,还包括:
8.一种机器人工作运行装置,其特征在于,所述机器人工作运行装置包括:
9.一种机器人工作运行设备,其特征在于,所述机器人工作运行设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的机器人工作运行程序,所述机器人工作运行程序配置为实现根据权利要求1至7中任一项所述的机器人工作运行方法。
10.一种存储有计算机程序的计算机可读存储介质,其特征在于,计算机程序被处理器执行时能够实现权利要求1至7任一项所述的机器人工作运行方法中的步骤。
技术总结
本发明公开了一种机器人工作运行方法、装置、设备及存储介质,属于机器人技术领域。本发明通过根据开荒模式指令,对待工作区域进行工作环境检测,输出工作环境检测结果;当工作环境检测结果为正常时,运行开荒模式程序在待工作区域进行开荒工作;当工作环境检测结果为异常时,发出警报并在操作端显示异常结果。本发明在接收到开荒模式指令后,通过对待工作区域的检测来实现对开荒工作条件是否满足的判断,进而为割草机器人开荒模式的运行提供保障,提高了割草机器人在开荒场景的工作效率。
技术研发人员:董海洋,文鹏,廖荣东,文子洋
受保护的技术使用者:虎鲸(深圳)创新技术有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!