一种全向型四驱增氧机器人
本技术涉及水体增氧,尤其涉及一种全向型四驱增氧机器人。
背景技术:
1、随着渔业养殖的集中化、产业化、规模化迅速发展和综合养殖等高产高效养殖技术的广泛应用,渔业养殖得以快速发展。但是高密度的水产养殖模式,导致水体氧气消耗巨大,无法保障水体中的氧气供应。增氧机器人的发明是渔业机械方面的重要突破,为渔业养殖的高产稳产提供了重要保障。
2、但是传统的增氧机器人运转设备由普通叶轮构成的行驶系统和转向系统组成,在转运空间有限,工作通道狭窄的情况下,存在着转弯半径大,空间利用率低,运动灵活性差,运转效率不高等诸多缺点;针对目前的普通叶轮构成的平台使用过程中所暴露的问题,有必要对增氧机器人进行结构上的优化与改进。
技术实现思路
1、本实用新型的目的在于克服传统技术中存在的上述问题,提供一种全向型四驱增氧机器人。
2、为实现上述技术目的,达到上述技术效果,本实用新型是通过以下技术方案实现:
3、一种全向四驱增氧机器人,包括:
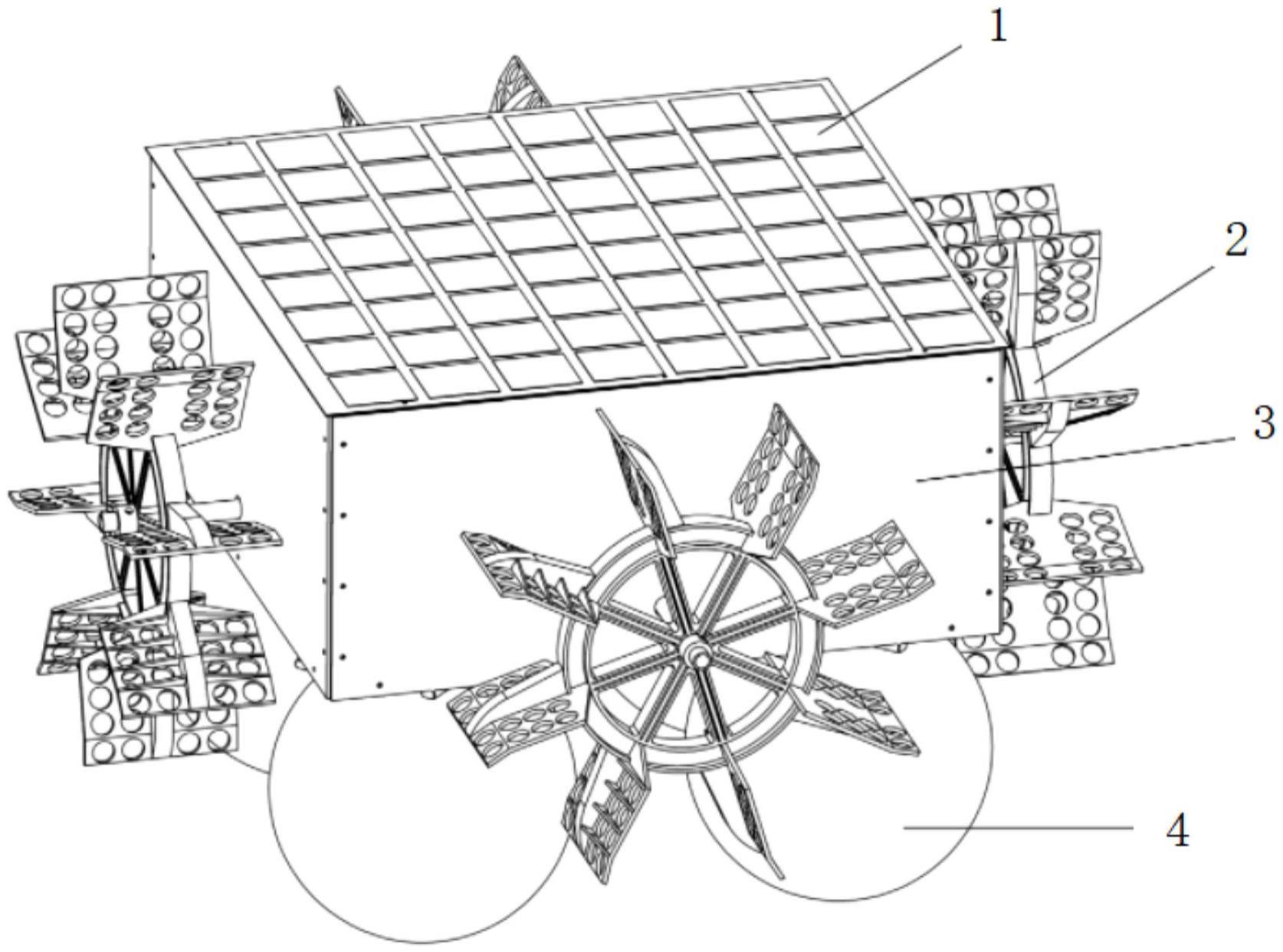
4、船体,所述船体作为安装载体,其底部安装有用于提供浮力的浮球;所述船体整体呈长方体状的框架式结构;
5、驱动系统,所述驱动系统包括控制盒、驱动电机、减速器和明轮,所述控制盒、驱动电机、减速器安装在船体的内部,所述驱动电机和减速器共设有四组,所述明轮共设有四个,所述驱动电机输出端与对应减速器的输入端连接,所述减速器的输出端通过联轴器与转轴连接,所述转轴伸出船体外的端部安装有明轮,四个所述明轮分别靠近船体的四个侧面分布,通过调节四个所述驱动电机的转速和转向来独立控制四个明轮的转速和转向,进而得到不同的船体运动轨迹。
6、进一步地,上述全向四驱增氧机器人中,所述船体内置有锂电池,所述船体的上侧外壁设有便于安装有太阳能电池板的支撑格栅,所述太阳能电池板通过转换器、线缆与锂电池进行连接。
7、进一步地,上述全向四驱增氧机器人中,所述船体的四周和底部平面安装有防止水进入内部的防水板。
8、进一步地,上述全向四驱增氧机器人中,所述锂电池为v,所述锂电池放在船体的内部中心位置处以便于提供能源,进而带动增氧机器人在水面运动。
9、进一步地,上述全向四驱增氧机器人中,所述驱动电机和减速器通过螺栓固定在防水板上,每个驱动电机和减速器下面各有一块用于增强连接强度的铁板。
10、进一步地,上述全向四驱增氧机器人中,所述控制盒的内部元器件包括继电器、hfg、树莓派、单片机、电流电压采集模块、降压模块、电机驱动器和gps导航;所述继电器控制树莓派和电机驱动器的开和关;所述hfg主要提供给树莓派网络配置;所述树莓派作为上位机,所述树莓派发送指令到单片机,所述单片机下发指令到达电机驱动器;所述电机驱动器能够调节所述驱动电机的转速和转向,进而调节增氧机器人的运动状态;所述电流电压采集模块主要负责采集电路中的电流和电压参数,所述降压模块是将v电压降压到便于提供给树莓派电源的v电压,所述gps导航用于记录船体的位置和航速。
11、进一步地,上述全向四驱增氧机器人中,所述明轮的轮体外侧沿周向均布有若干叶板,所述叶板上均匀开设有若干利于形成水膜的水膜形成孔。
12、进一步地,上述全向四驱增氧机器人中,所述浮球通过铝轴固定安装在船体的下端,所述铝轴位于浮球的两槽各安装有一个防止浮球轴向串动的止动固定环。
13、进一步地,上述全向四驱增氧机器人中,相邻组中的所述驱动电机和减速器呈度夹角,相对称组中的所述驱动电机和减速器共线,相邻的两个所述明轮呈度夹角,相对称的两个所述明轮的旋转中心线相互重合。
14、进一步地,上述全向四驱增氧机器人中,所述驱动电机和减速器施加的转速不同时,增氧机器人有不同的运动特点,具体表现为:四个明轮依次记为明轮a、明轮b、明轮c和明轮d,明轮a和明轮d关于增氧机器人几何中心o点对称,明轮b和明轮c关于增氧机器人几何中心o点对称;
15、当明轮a和明轮d以同向和大小相等的速度,且明轮b和明轮c速度为时,该增氧机器人以两轮运动方向作直线运动;当明轮b和明轮c以同向和大小相等的速度,且明轮a和明轮d速度为时,该增氧机器人以两轮运动方向作直线运动;
16、当明轮a和明轮d以同向和大小相等的速度运动,且明轮b和明轮c也以同向和大小相等的速度进行运动,该增氧机器人作斜移运动;
17、当明轮a、明轮b、明轮c、明轮d运动方向对其增氧机器人几何中心o点处产生顺时针/逆时针的转矩,该增氧机器人作旋转增氧运动;
18、当明轮a和明轮d运动的方向相反且速度大小相等,明轮b和明轮c运动的方向相反且速度大小相等,并且明轮a、d对几何中心o点产生的力偶矩与明轮b、c对几何中心产生的力偶矩大小相等方向相反,该增氧机器人能够悬停增氧。
19、本实用新型的有益效果是:
20、1、本实用新型提供的全向型四驱增氧机器人设计合理,其每相邻的两个电机之间两两正切,能够使增氧机器人的运动姿态出现多样化,这样能够在转运空间有限,工作通道狭窄的情况下,使其转弯半径小,空间利用率高,运动灵活性好,运转效率高等诸多优点。
21、2、本实用新型提供的一种全向型四驱增氧机器人,其在船体上采用的为铝型材组装的框架,一方面组装和加工比较方便,另一方面质量轻、强度高符合所选取的范围。
22、3、本实用新型提供的一种全向型四驱增氧机器人,其在船体上设置太阳能电池板,利用了太阳能电池板为船体在水面航行;一方面合理利用了丰富的太阳能资源,节约了传统能源的损耗;另一方面,相对于传统增氧机使用电缆连接上电源的方式,对增氧区域没有限制,能够满足整个养殖场地的增氧需求,使用更加灵活。
23、当然,实施本实用新型的任一产品并不一定需要同时达到以上的所有优点。
技术特征:
1.一种全向型四驱增氧机器人,其特征在于,包括:
2.根据权利要求1所述的全向型四驱增氧机器人,其特征在于:所述船体(17)内置有锂电池(10),所述船体(17)的上侧外壁设有便于安装有太阳能电池板(1)的支撑格栅(8),所述太阳能电池板(1)通过转换器、线缆与锂电池(10)进行连接。
3.根据权利要求2所述的全向型四驱增氧机器人,其特征在于:所述船体(17)的四周和底部平面安装有防止水进入内部的防水板(3)。
4.根据权利要求3所述的全向型四驱增氧机器人,其特征在于:所述锂电池(10)为24v,所述锂电池(10)放在船体的内部中心位置处以便于提供能源,进而带动增氧机器人在水面运动。
5.根据权利要求4所述的全向型四驱增氧机器人,其特征在于:所述驱动电机(13)和减速器(14)通过螺栓固定在防水板(3)上,每个驱动电机(13)和减速器(14)下面各有一块用于增强连接强度的铁板(21)。
6.根据权利要求1所述的全向型四驱增氧机器人,其特征在于:所述控制盒(9)的内部元器件包括继电器、hf2421g、树莓派、单片机、电流电压采集模块、降压模块、电机驱动器和gps导航;所述继电器控制树莓派和电机驱动器的开和关;所述hf2421g主要提供给树莓派网络配置;所述树莓派作为上位机,所述树莓派发送指令到单片机,所述单片机下发指令到达电机驱动器;所述电机驱动器能够调节所述驱动电机(13)的转速和转向,进而调节增氧机器人的运动状态;所述电流电压采集模块主要负责采集电路中的电流和电压参数,所述降压模块是将24v电压降压到便于提供给树莓派电源的5v电压,所述gps导航用于记录船体的位置和航速。
7.根据权利要求1所述的全向型四驱增氧机器人,其特征在于:所述明轮(2)的轮体外侧沿周向均布有若干叶板,所述叶板上均匀开设有若干利于形成水膜的水膜形成孔。
8.根据权利要求1所述的全向型四驱增氧机器人,其特征在于:所述浮球(4)通过铝轴(6)固定安装在船体(17)的下端,所述铝轴(6)位于浮球(4)的两槽各安装有一个防止浮球(4)轴向串动的止动固定环(20)。
9.根据权利要求1所述的全向型四驱增氧机器人,其特征在于:相邻组中的所述驱动电机(13)和减速器(14)呈90度夹角,相对称组中的所述驱动电机(13)和减速器(14)共线,相邻的两个所述明轮呈90度夹角,相对称的两个所述明轮(2)的旋转中心线相互重合。
10.根据权利要求1所述的全向型四驱增氧机器人,其特征在于:所述驱动电机(13)和减速器(14)施加的转速不同时,增氧机器人有不同的运动特点,具体表现为:四个明轮(2)依次记为明轮a、明轮b、明轮c和明轮d,明轮a和明轮d关于增氧机器人几何中心o点对称,明轮b和明轮c关于增氧机器人几何中心o点对称;
技术总结
本技术涉及水体增氧技术领域,尤其涉及一种全向型四驱增氧机器人,包括船体和驱动系统;船体整体呈框架式结构,其底部安装有浮球;驱动系统包括控制盒、驱动电机、减速器和明轮,所述控制盒、驱动电机、减速器安装在船体的内部,驱动电机和减速器共设有四组,明轮共设有四个,驱动电机的输出端与对应减速器的输入端连接,减速器的输出端通过联轴器与转轴连接,转轴伸出船体外的端部安装有明轮。本技术设计合理,其每相邻的两个电机之间两两正切,能够使增氧机器人的运动姿态出现多样化,这样能够在转运空间有限,工作通道狭窄的情况下,具有转弯半径小,空间利用率高,运动灵活性好,运转效率高等诸多优点。
技术研发人员:谢能刚,赵翔,朱晨,舒军勇,王萌,尤瑞涛
受保护的技术使用者:安徽工业大学
技术研发日:20230106
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!