一种基于激光补光的植物补光机器人的制作方法
本技术属于植物补光,涉及一种基于激光补光的植物补光机器人。
背景技术:
1、大棚种植经常会遇到光照不足的时候,夏天的阴雨天气、冬天的雾霾天,以及大棚材料的遮挡导致阳光分布不均匀,所以很难满足绿色植物正常生长和光合作用对于阳光的需求。目前大棚种植主要采用led灯进行补光,采用半导体照明原理及红蓝灯珠固定配比的方法实现光照度、光质的补光方案。通过适合植物所需光谱的led灯照射,不仅可以促进其生长,而且还可以延长花期,提高花的品质。进一步把这种高效光源系统应用到大棚、温室等设施等农业生产上,一方面可以解决日照不足导致番茄、黄瓜等大棚蔬菜口感下降的弊端,另一方面还可以使冬季大棚茄果类蔬菜提前到春节前后上市,从而达到反季节培植的目的。
2、采用led灯进行补光,此种传统补光方式投入成本巨大,很难大规模应用推广,而且补光时间、灯的工作状态及大棚环境状况不能及时掌控和调整。
技术实现思路
1、本实用新型解决的技术问题在于提供一种基于激光补光的植物补光机器人,可以及时掌握补光时间、灯的工作状态及大棚环境状况,方便对激光补光器进行调整。
2、本实用新型是通过以下技术方案来实现:
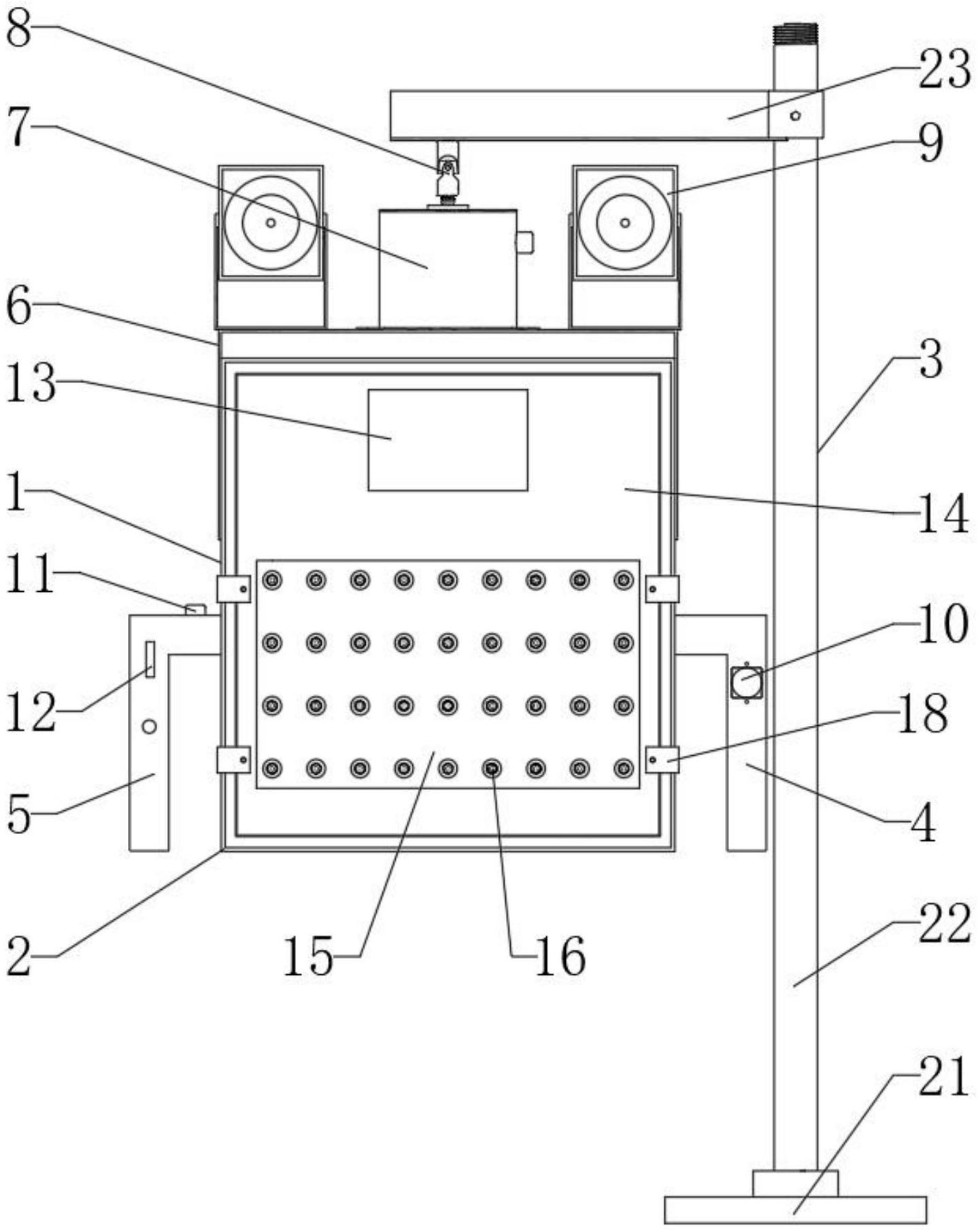
3、一种基于激光补光的植物补光机器人,包括设有左臂和右臂的激光补光器;激光补光器上设有环境信息采集单元;
4、环境采集单元包括安装于左臂上的接近传感器,安装于右臂上的光照传感器和温湿度传感器;
5、激光补光器包括壳体、补光灯支架、安装支架和嵌设显示屏的补光组件;补光组件安装于壳体内;
6、补光灯支架转动安装于壳体外侧,补光灯支架顶部设有旋转云台,旋转云台纵向输出轴上设有万向节,万向节顶部与安装支架相连;补光灯支架顶部两侧均设有语音喇叭。
7、进一步地,补光组件包括由外到内依次分布的led面板、聚光板、若干激光器以及底板组成;
8、激光器安装于聚光板与底板之间;
9、若干激光器由蓝光半导体激光器和红光半导体激光器组成,且蓝光半导体激光器和红光半导体激光器的数量比为1:8;
10、蓝光半导体激光器居中配制,红光半导体激光器辐射配置其周围。
11、进一步地,补光组件与壳体之间通过卡件固定。
12、进一步地,显示屏嵌设于led面板和聚光板之间。
13、进一步地,旋转云台纵向输出轴通过万向节连接轴与万向节相连。
14、进一步地,语音喇叭通过语音喇叭支架安装于补光灯支架顶部,语音喇叭支架转动安装于语音喇叭外侧。
15、进一步地,安装支架包括底座,底座顶部设有支撑杆,支撑杆顶部设有固定支架,支撑杆上套设有活动支架,活动支架与支撑杆之间通过螺钉定位;
16、活动支架底部与万向节顶部相连。
17、进一步地,所述壳体内还设有控制单元;
18、旋转云台、语音喇叭、接近传感器、光照传感器、温湿度传感器、显示屏和激光器均与控制单元电连接。
19、与现有技术相比,本实用新型具有以下有益的技术效果:
20、1、本实用新型提供的基于激光补光的植物补光机器人,旋转云台和万向节可以保障激光补光器能够对大棚内植物进行水平照射补光;通过环境信息采集单元实时监测激光补光器在大棚内工作环境信息,即光照传感器和温湿度传感器采集到的光照强度数据、温湿度数据,实时调整激光补光器内补光组件的工作状态,将当前环境下的光照强度数据、温湿度数据实时显示在显示屏上;接近传感器检测到有人靠近植物补光机器人后,控制单元通过语音喇叭播放当前环境温湿度及光照强度,并发出语音提醒。
21、2、本实用新型提供的基于激光补光的植物补光机器人,通过种植的植物适合的光谱调整激光器的配比,以最大限度的提升补光效果,有助于降低植物补光成本。
技术特征:
1.一种基于激光补光的植物补光机器人,其特征在于,包括设有左臂(4)和右臂(5)的激光补光器(1);激光补光器(1)上设有环境信息采集单元;
2.根据权利要求1所述的一种基于激光补光的植物补光机器人,其特征在于,补光组件包括由外到内依次分布的led面板(14)、聚光板(15)、若干激光器(16)以及底板(17)组成;
3.根据权利要求1所述的一种基于激光补光的植物补光机器人,其特征在于,补光组件与壳体(2)之间通过卡件(18)固定。
4.根据权利要求1所述的一种基于激光补光的植物补光机器人,其特征在于,显示屏(13)嵌设于led面板(14)和聚光板(15)之间。
5.根据权利要求1所述的一种基于激光补光的植物补光机器人,其特征在于,旋转云台(7)纵向输出轴通过万向节连接轴(19)与万向节(8)相连。
6.根据权利要求1所述的一种基于激光补光的植物补光机器人,其特征在于,语音喇叭(9)通过语音喇叭支架(20)安装于补光灯支架(6)顶部,语音喇叭支架(20)转动安装于语音喇叭(9)外侧。
7.根据权利要求1所述的一种基于激光补光的植物补光机器人,其特征在于,安装支架(3)包括底座(21),底座(21)顶部设有支撑杆(22),支撑杆(22)顶部设有固定支架(23),支撑杆(22)上套设有活动支架(24),活动支架(24)与支撑杆(22)之间通过螺钉定位;
8.根据权利要求2所述的一种基于激光补光的植物补光机器人,其特征在于,所述壳体(2)内还设有控制单元;
技术总结
本技术属于植物补光技术领域,公开了一种基于激光补光的植物补光机器人,包括设有左臂和右臂的激光补光器;激光补光器包括壳体、补光灯支架、安装支架和嵌设显示屏的补光组件;补光组件安装于壳体内;补光灯支架转动安装于壳体外侧,补光灯支架顶部设有旋转云台,旋转云台纵向输出轴上设有万向节,万向节顶部与安装支架相连;补光灯支架顶部两侧均设有语音喇叭;激光补光器上设有环境信息采集单元;环境采集单元包括安装于左臂上的接近传感器,安装于右臂上的光照传感器和温湿度传感器;可以及时掌握补光时间、灯的工作状态及大棚环境状况,方便对激光补光器进行调整。
技术研发人员:赵鹏
受保护的技术使用者:西安同凯电子科技有限责任公司
技术研发日:20230116
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!