一种卸粮总成及收获机的制作方法
本技术属于收获机领域,尤其涉及一种卸粮总成及收获机。
背景技术:
1、收获机械卸粮筒卸粮之后的回位,如果是人工操作会有如下不便:由于驾驶室是前置,而卸粮筒是后置,驾驶员需回头观察卸粮筒的旋转位置和角度,工作效率低且容易出错。目前多数收获机的卸粮筒在匹配了一键回位功能,其多采用编码器或位置传感器采集卸粮筒旋出的角度值,一键回位时,同样以该角度值回旋即可,但其仍存在一些缺陷,目前一键回位功能的方式主要有两种:1、编码器检测回转角度方案的缺点:当卸粮筒转出时,编码器计下旋出的角度θ1;卸粮筒回位旋转时,控制器会控制卸粮筒按之前旋出时计下的角度θ1旋回,但是当存在机械打滑等误差时,θ1本来就是不准确的,所以卸粮筒旋回时,不能准确落入支架上;2、位置传感器检测并控制卸粮筒回位方案:卸粮筒一键回位旋回时,当旋转至终点时,会有一个接近传感器或行程开关检测卸粮筒是否旋回支架正上方,同时在此处设置机械限位,防止卸粮筒由于惯性旋过支架,但此时由于卸粮筒旋回角速度过大,会以较大的动能冲击机械限位机构,久而久之会对限位机构造成疲劳损伤。
技术实现思路
1、为了解决上述技术问题,本实用新型的目的之一在于提供一种可在卸粮筒回旋时进行缓冲减速以实现精确回位的卸粮总成。
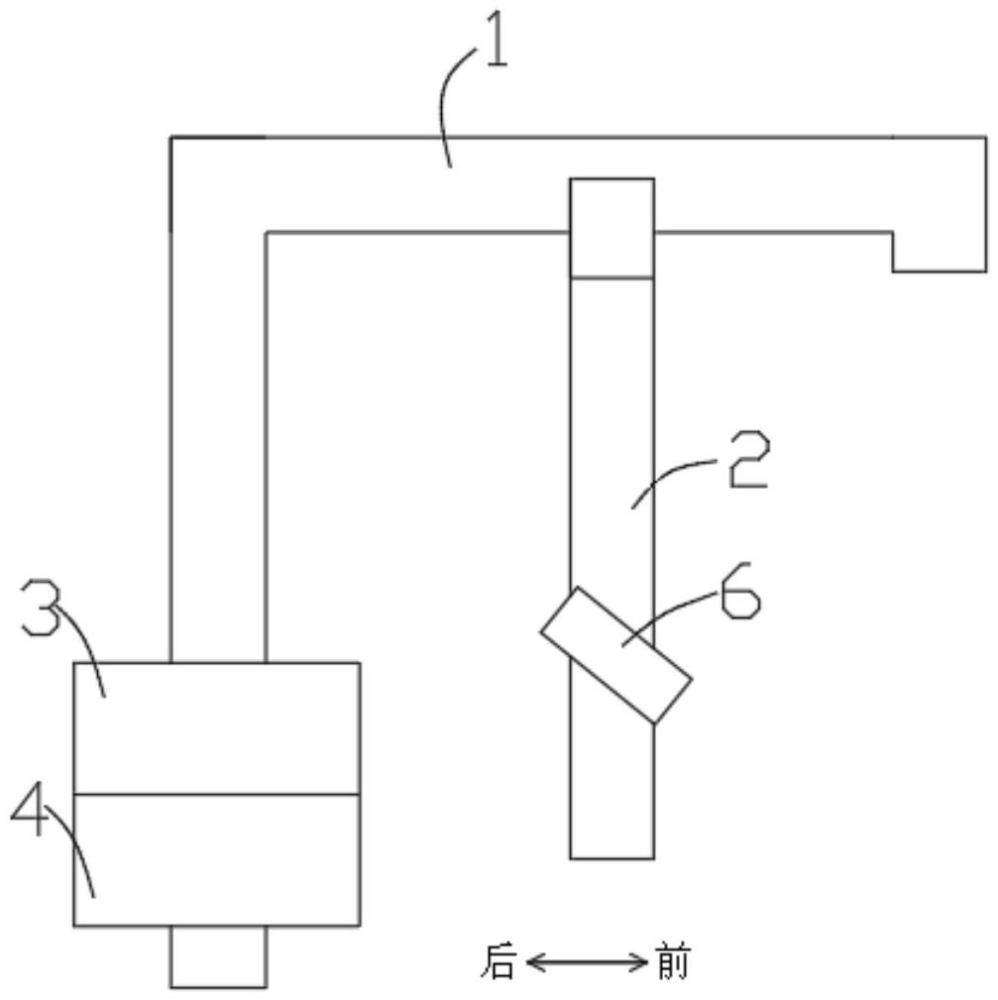
2、为了实现上述目的,本实用新型的技术方案如下:一种卸粮总成,包括卸粮筒、卸粮筒支架、驱动所述卸粮筒旋转的驱动电机以及驱动所述卸粮筒上升或下降的升降机构,所述升降机构用以驱动所述卸粮筒上升至与所述卸粮筒支架相分离,并由所述驱动电机驱动所述卸粮筒旋转至工作位,或由所述驱动电机驱动所述卸粮筒回旋至所述卸粮筒支架的正上方,并由所述升降机构驱动所述卸粮筒下降至托在所述卸粮筒支架上,还包括控制器和感应元件,所述驱动电机、感应元件和升降机构均与所述控制器电连接,所述卸粮筒水平段旋转轨迹的中部位置处设有感应位点,所述感应元件的感应端朝向所述感应位点。
3、上述技术方案的有益效果在于:如此可在卸粮筒回旋至复位(回到初始位置)时,当回旋至感应位点时并进行减速,直至其减速为零时(恰好停止),此时卸粮筒也恰好回旋至水平段正位于卸粮筒支架的上方,此时升降机构带动卸粮筒下降至水平段托在卸粮筒支架上即可。
4、上述技术方案中还包括驱动电机为伺服减速电机或变频减速电机。
5、上述技术方案的有益效果在于:如此是的卸粮筒旋转的角度和转速可进行精准的控制。
6、上述技术方案中所述卸粮筒在驱动电机驱动其回旋至水平段经过所述感应位点时,所述卸粮筒的瞬时角速度为ω0,且所述卸粮筒开始以角加速度为ω1进行减速运行,
7、其中,ω1=2(θ-ω0t)/t2,
8、θ为感应位点至初始位置之间的弧心角;t为预设定的时长值,其表示卸粮筒由感应位点回旋至所述卸粮筒支架正上方的时长。
9、上述技术方案的有益效果在于:如此可使得卸粮筒能在设定的时长t内,精准的将转速降至0并停留在卸粮筒支架的正上方。
10、上述技术方案中所述感应元件为超声波雷达。
11、上述技术方案的有益效果在于:其运行稳定性佳,且不会受积尘影响。
12、上述技术方案中还包括一键回位按钮,所述一键回位按钮与所述控制器电连接,所述一键回位按钮供驾驶员给控制器发送信号,以由控制器控制所述驱动电机运行以将所述卸粮筒由工作位回旋至所述卸粮筒支架的正上方。
13、上述技术方案的有益效果在于:如此可由驾驶员实现卸粮筒一键旋回复位,其操作简便。
14、上述技术方案中所述感应元件安装在所述卸粮筒支架上。
15、上述技术方案的有益效果在于:其安装简便。
16、上述技术方案中所述卸粮筒支架的上端为u形槽,且所述卸粮筒回旋至所述卸粮筒支架的正上方时,由所述控制器控制所述升降机构下降至所述卸粮筒的水平段落入至所述卸粮筒支架上端的u形槽内。
17、上述技术方案的有益效果在于:如此在卸粮筒在初始位置时,卸粮筒的水平段落入至卸粮筒支架上端的u形槽内时,可由u形槽对卸粮筒进限位,避免收获机在行驶时,卸粮筒不会晃动。
18、本实用新型的目的之二在于提供一种卸粮筒可一键精准并缓冲回位的收获机。
19、为了实现上述目的,本实用新型的技术方案如下:一种收获机,包括如上所述的卸粮总成。
20、上述技术方案的有益效果在于:其智能化程度高,且在卸粮筒回旋时能实现精准的复位。
技术特征:
1.一种卸粮总成,包括卸粮筒(1)、卸粮筒支架(2)、驱动所述卸粮筒(1)旋转的驱动电机(3)以及驱动所述卸粮筒(1)上升或下降的升降机构(4),所述升降机构(4)用以驱动所述卸粮筒(1)上升至与所述卸粮筒支架(2)相分离,并由所述驱动电机(3)驱动所述卸粮筒(1)旋转至工作位,或由所述驱动电机(3)驱动所述卸粮筒(1)回旋至所述卸粮筒支架(2)的正上方,并由所述升降机构(4)驱动所述卸粮筒(1)下降至托在所述卸粮筒支架(2)上,其特征在于,还包括控制器(5)和感应元件(6),所述驱动电机(3)、感应元件(6)和升降机构(4)均与所述控制器(5)电连接,所述卸粮筒(1)水平段旋转轨迹的中部位置处设有感应位点,所述感应元件(6)的感应端朝向所述感应位点,所述卸粮筒(1)回转至经过所述感应位点时开始进行匀减速转动,直至转动至所述卸粮筒支架(2)的上方时转速为0;
2.根据权利要求1所述的卸粮总成,其特征在于,还包括驱动电机(3)为伺服减速电机或变频减速电机。
3.根据权利要求1所述的卸粮总成,其特征在于,所述感应元件(6)为超声波雷达。
4.根据权利要求1所述的卸粮总成,其特征在于,还包括一键回位按钮(7),所述一键回位按钮(7)与所述控制器(5)电连接,所述一键回位按钮(7)供驾驶员给控制器(5)发送信号,以由控制器(5)控制所述驱动电机(3)运行以将所述卸粮筒(1)由工作位回旋至所述卸粮筒支架(2)的正上方。
5.根据权利要求1所述的卸粮总成,其特征在于,所述感应元件(6)安装在所述卸粮筒支架(2)上。
6.根据权利要求1所述的卸粮总成,其特征在于,所述卸粮筒支架(2)的上端为u形槽,且所述卸粮筒(1)回旋至所述卸粮筒支架(2)的正上方时,由所述控制器(5)控制所述升降机构(4)下降至所述卸粮筒(1)的水平段落入至所述卸粮筒支架(2)上端的u形槽内。
7.一种收获机,其特征在于,包括如权利要求1-6任一项所述的卸粮总成。
技术总结
本技术公开了一种卸粮总成及收获机,卸粮总成包括卸粮筒、卸粮筒支架、驱动卸粮筒旋转的驱动电机以及驱动卸粮筒上升或下降的升降机构,还包括控制器和感应元件,驱动电机、感应元件和升降机构均与控制器电连接,卸粮筒水平段旋转轨迹的中部位置处设有感应位点,感应元件的感应端朝向感应位点,且卸粮筒由感应位点旋转至卸粮筒支架正上方时的旋转角度为θ,卸粮筒回旋至感应位点时,感应元件将感应到信号发送至控制器,并由控制器控制驱动电机减速转动,直至驱动电机减速至转速为0时,卸粮筒的水平段恰好位于卸粮筒支架的正上方,如此可在卸粮筒回旋至复位时操作简便,且回位时精确度高。
技术研发人员:温读夫,谭翠卿,李春猛,韩峰,于文静,王瑞雨,王一鸣
受保护的技术使用者:潍柴雷沃智慧农业科技股份有限公司
技术研发日:20230217
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!