一种大蒜联合收获机的振动挖掘装置
本技术属于农业机械,尤其涉及一种大蒜联合收获机的大阻力振动挖掘装置。
背景技术:
1、在大蒜收获领域,由于大蒜种植农艺要求对行种植,现有的大蒜联合收获机振动铲间距均根据行距进行设计,均是单行单铲作业结构。这种单行单铲的作业方式虽然降低了整机的前进阻力,但是收获效率不高;而且这种作业方式对农艺的要求非常高,大蒜种植行的直线度如果不满足要求,那么就会导致个别大蒜挖掘松土不够,影响后续收获。当蒜田内存在高低起伏状况时,联合收获机整机前进不平稳,该单铲结构又不具备入土角调节功能,因而在挖掘过程中会损伤大蒜,影响收获质量。进行多行作业时,需要根据作业行数安装相应数量的单铲结构,安装工序复杂,费时费力。
技术实现思路
1、针对现有技术中存在的不足,本实用新型提供了一种大蒜联合收获机的振动挖掘装置,有效解决了传统挖掘装置所存在的收获效率不高、对种植农艺要求好、收获质量不好等问题。
2、本实用新型是通过以下技术手段实现上述技术目的的。
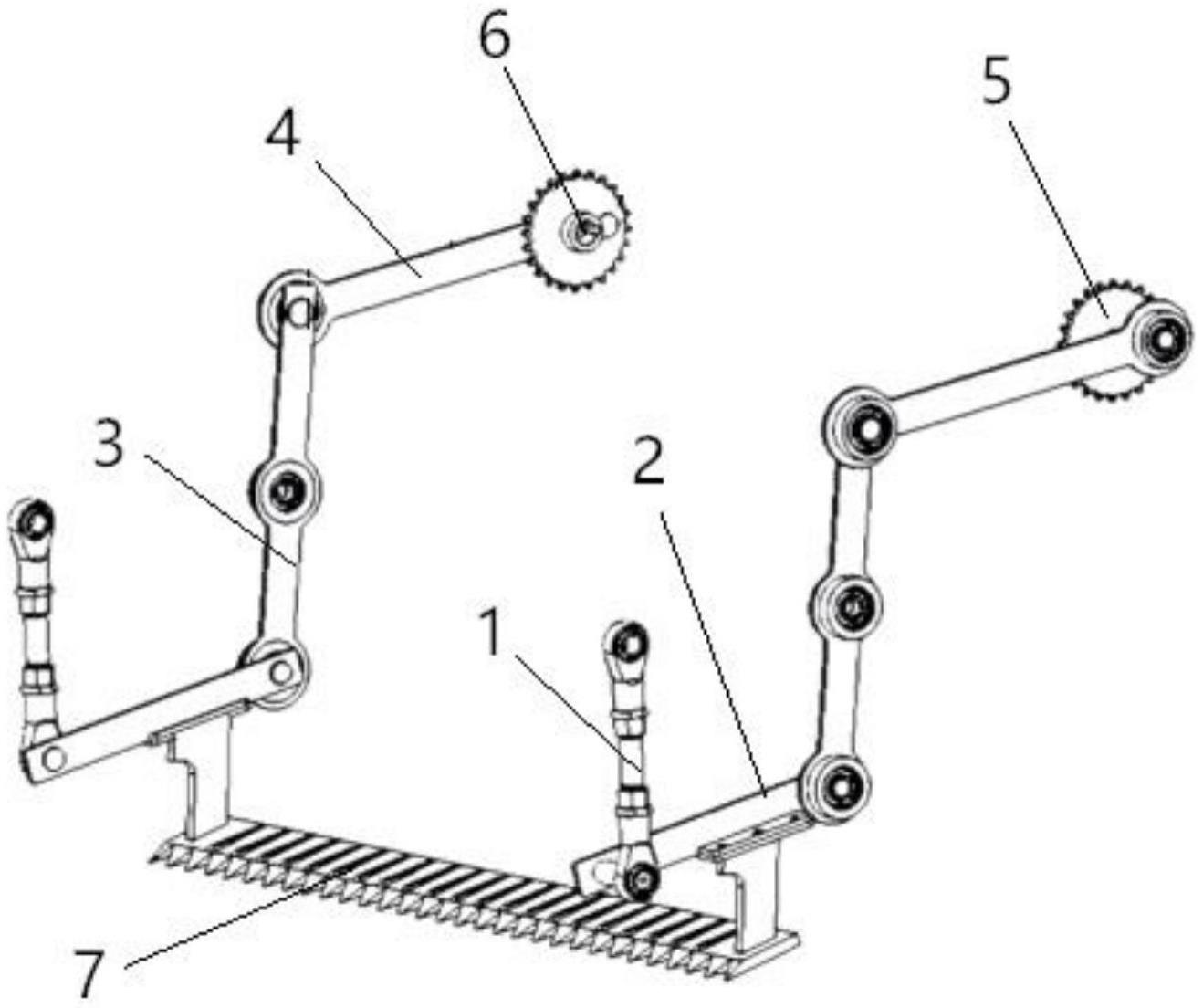
3、一种大蒜联合收获机的振动挖掘装置,包括长条状挖掘铲,挖掘铲前端为一排碎土齿,上表面设置有多个线型背脊;挖掘铲左右两端均安装有安装板,安装板两端均焊接固定有一根销轴;其中,靠近碎土齿的两根销轴上均铰接安装有角度调节杆,安装板上的另外两根销轴上均铰接安装有第一连杆,第一连杆另一端均铰接安装有第二连杆,第二连杆另一端均焊接固定有偏心轴,偏心轴另一端均焊接固定有链轮。
4、进一步地,所述角度调节杆包括螺杆相互连接的上鱼眼接头和下鱼眼接头,且下鱼眼接头铰接安装在靠近碎土齿的销轴上,上鱼眼接头与大蒜联合收获机前端侧板上的销轴连接。
5、进一步地,所述螺杆与上鱼眼接头及下鱼眼接头接触处均安装有用于锁紧的螺母。
6、进一步地,所述挖掘铲左右两端均垂直焊接固定有一连接板,连接板顶部均通过螺栓固定安装有矩形安装板。
7、进一步地,所述链轮与大蒜联合收获机上的主动链轮通过链条传动连接,且主动链轮由电机提供驱动力。
8、本实用新型具有如下有益效果:
9、本实用新型用一带碎土齿的长铲替代单铲,长铲表面还设置有若干线型背脊,使得振动挖掘装置不仅能一次完成多行大蒜的破土和碎土,实现工作幅宽范围内所有土壤的破土和抛翻,而且能降低碎土时的阻力,有效提高碎土效率。本实用新型所述的振动挖掘装置可以适用于大蒜的不对行收获,无需考虑种植行距、种植行直线度的影响;而且,通过调整鱼眼接头和螺杆即可方便灵活的调节挖掘铲入土角度,能够适用于各种不同工况下的大蒜挖掘作业,防止误伤大蒜,保证大蒜收获质量。另外,本实用新型通过设计链轮式偏心轮,将动力输入和偏心运动集合一体,带动长铲做挖掘运动,相较于传统的需要安装多个单铲进行多行大蒜挖掘作业的方式,节省了工序,节约了材料,整体操作简单、功能齐全、结构易于拆卸,方便了后期的维护修理。
技术特征:
1.一种大蒜联合收获机的振动挖掘装置,其特征在于,包括长条状挖掘铲(7),挖掘铲(7)左右两端均安装有安装板(2),安装板(2)两端均焊接固定有一根销轴;其中,靠近挖掘铲(7)前端的两根销轴上均铰接安装有角度调节杆(1),靠近挖掘铲(7)后端的两根销轴上均铰接安装有第一连杆(3),第一连杆(3)另一端均铰接安装有第二连杆(4),第二连杆(4)另一端均焊接固定有偏心轴(6),偏心轴(6)另一端均焊接固定有链轮(5)。
2.根据权利要求1所述的大蒜联合收获机的振动挖掘装置,其特征在于,所述挖掘铲(7)前端为一排碎土齿,上表面设置有多个线型背脊。
3.根据权利要求1所述的大蒜联合收获机的振动挖掘装置,其特征在于,所述角度调节杆(1)包括螺杆(102)相互连接的上鱼眼接头(100)和下鱼眼接头(101),且下鱼眼接头(101)铰接安装在靠近挖掘铲(7)前端的销轴上,上鱼眼接头(100)与大蒜联合收获机前端侧板上的销轴连接。
4.根据权利要求3所述的大蒜联合收获机的振动挖掘装置,其特征在于,所述螺杆(102)与上鱼眼接头(100)及下鱼眼接头(101)接触处均安装有用于锁紧的螺母(103)。
5.根据权利要求1所述的大蒜联合收获机的振动挖掘装置,其特征在于,所述挖掘铲(7)左右两端均垂直焊接固定有一连接板,连接板顶部均通过螺栓固定安装有矩形安装板(2)。
6.根据权利要求1所述的大蒜联合收获机的振动挖掘装置,其特征在于,所述链轮(5)与大蒜联合收获机上的主动链轮通过链条传动连接,且主动链轮由电机提供驱动力。
技术总结
本技术提供一种大蒜联合收获机的振动挖掘装置,包括挖掘铲,挖掘铲两端均安装有角度调节杆和连杆机构,角度调节杆由鱼眼接头以及螺杆组成,用于调整挖掘铲的入土角度,使得本技术能够适用于各种不同工况下的大蒜挖掘作业,防止误伤大蒜,保证大蒜收获质量。连杆机构与偏心轴连接,偏心轴上焊接固定链轮,该链轮通过链条与大蒜联合收获机上的链轮配合,由电机提供动力,带动挖掘铲运动,能一次完成多行大蒜的破土和碎土;而且挖掘铲前端带有碎土齿,表面设置有线型背脊,能降低碎土时的阻力,有效提高碎土效率。本技术可以适用于大蒜的不对行收获,无需考虑种植行距、种植行直线度,操作简单、功能齐全、易于拆卸,方便维护修理。
技术研发人员:李骅,徐国栋,王永健,葛艳艳,钟志堂,吴小伟,鲜洁宇
受保护的技术使用者:南京农业大学
技术研发日:20230306
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!