一种农机自动驾驶装置的制作方法
本技术涉及自动驾驶农机,特别是一种农机自动驾驶装置。
背景技术:
1、随着科技的发展大部分农业逐渐被机械取代,通过物联网进行远程操作,不需要人工进行现场驾驶,这样不仅能够提高工作效率,还能够降低人工的劳动强度。
2、根据专利文献公开号为cn212905983u所提供的一种自动驾驶农机的安全装置,包括机身,所述机身的下表面四个拐角处均设置有凸块,各个所述凸块的下表面均设置有车轮,其中两个所述凸块的下端前表面均固定安装有距离传感器,所述机身的下方前表面固定设置有防侧翻机构,所述机身的两侧表面均设置有缓冲机构。虽然该装置能够对凸起的土壤进行移除保证自动驾驶的工作效率,但是没有考虑到在对土壤移除的过程中,有可能灰尘会沾染在该装置的齿轮上,长期下来,齿轮有可能会出现被运转生涩甚至卡死的情况。
技术实现思路
1、本实用新型的目的在于提供一种农机自动驾驶装置,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
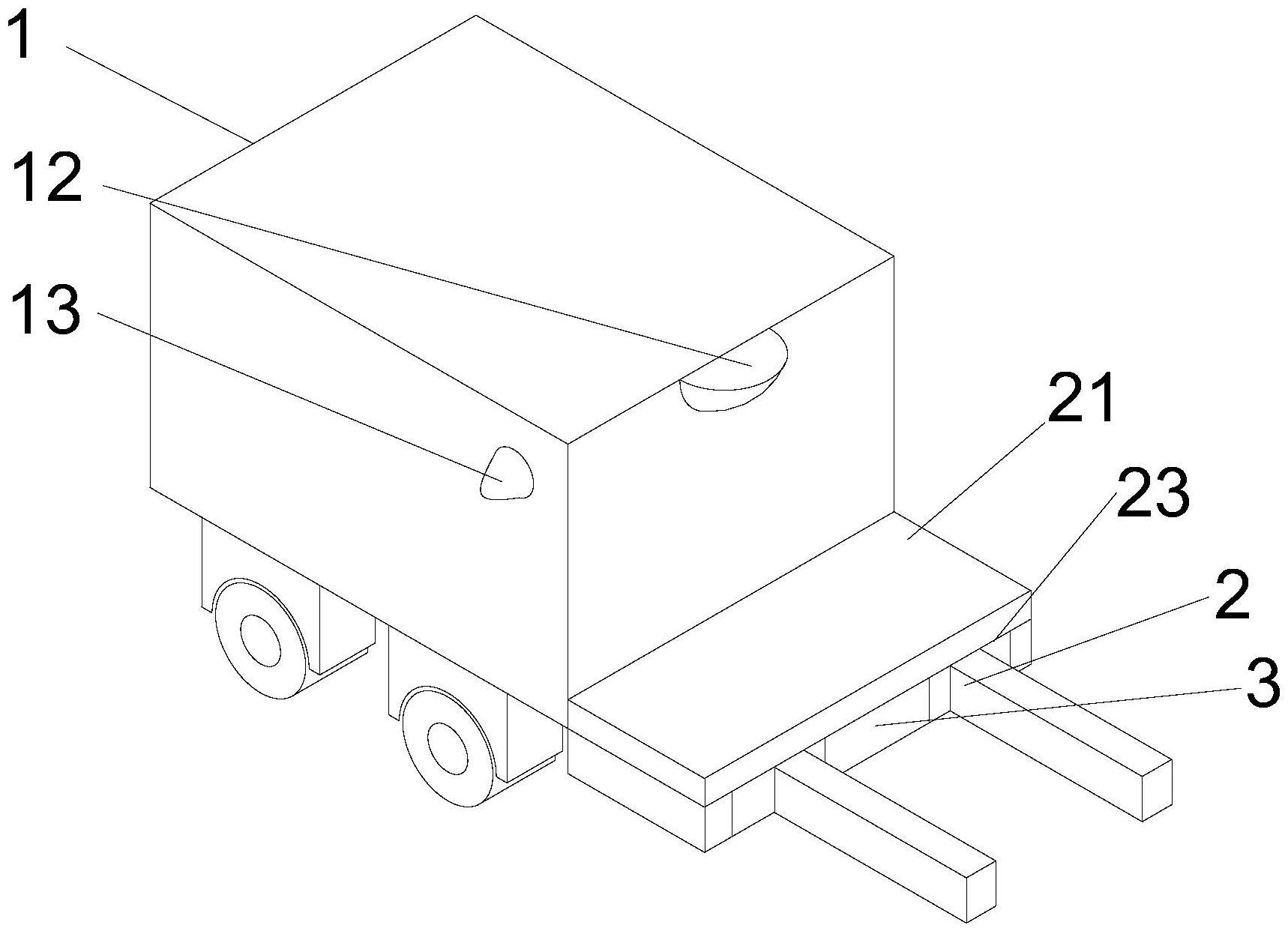
3、一种农机自动驾驶装置,包括机身,机身一侧设置有分土结构和防灰结构,分土结构包括有固定板,固定板一侧与机身外壁为焊接,固定板下表面连接有外壳,外壳内部对称设有移动臂,两个移动臂上端均铰链连接有固定杆,两个移动臂内侧均对称连接有推力杆,两个推力杆上端铰链连接有位移杆,外壳位于推力杆远离固定杆的一端开设有活动槽,两个移动臂均延伸出活动槽,防灰结构包括有设置在活动槽中心的中心块,中心块一侧贯穿设置有第一空槽,第一空槽两端内部对称设置有中心挡板,两个中心挡板之间设置有第一弹簧。
4、作为本实用新型优选的方案,固定杆远离移动臂的一侧设置有液压缸,液压缸的输出端贯穿固定杆与位移杆固定连接,移动臂和位移杆以及推力杆均与外壳内壁相接触且呈活动连接,固定杆与外壳内壁相接触且呈固定连接。
5、作为本实用新型优选的方案,外壳上表面与固定板下表面为焊接,两个推力杆与移动臂外壁为转动连接。
6、作为本实用新型优选的方案,中心挡板与第一空槽内壁呈划扣连接,第一弹簧和中心挡板与第一空槽内壁均相接触呈活动连接,第一弹簧的两端均与中心挡板一侧外壁卡扣连接。
7、作为本实用新型优选的方案,外壳外壁位于活动槽两侧对称开设有第二空槽,两个第二空槽内部均设有两侧挡块,两个两侧挡块均与第二空槽内壁均为划扣连接,两个第二空槽内部均设有第二弹簧,两个第二弹簧两端分别与两侧挡块一侧外壁和第二空槽内壁均为卡扣连接。
8、作为本实用新型优选的方案,外壳外壁靠近液压缸的一侧支架连接有吸风机,吸风机输出端贯穿外壳,吸风机输出端与外壳内壁密闭连接。
9、作为本实用新型优选的方案,机身位于分土结构一侧外壁上端设置有监视器,监视器与机身外壁支架连接,机身一侧外壁支架连接有报警器。
10、与现有技术相比,本实用新型的有益效果为:该机构在结构上设置有挡块,当移动臂在活动槽内移动时,中心挡块和两侧挡块能够随着进行位移,有效的将外面飞起的大部分灰尘阻挡在外,同时设置的吸风机能够将少部分吸入外壳内部的灰尘吸走,能够有效保证机构的运转,避免因灰尘过多可能造成的转动生涩甚至卡死。
技术特征:
1.一种农机自动驾驶装置,包括机身(1),其特征在于,所述机身(1)一侧设置有分土结构(2)和防灰结构(3),所述分土结构(2)包括有固定板(21),所述固定板(21)一侧与机身(1)外壁为焊接,所述固定板(21)下表面连接有外壳(22),所述外壳(22)内部对称设有移动臂(25),两个所述移动臂(25)上端均铰链连接有固定杆(26),两个所述移动臂(25)内侧均对称连接有推力杆(28),两个所述推力杆(28)上端铰链连接有位移杆(27),所述外壳(22)位于推力杆(28)远离固定杆(26)的一端开设有活动槽(23),两个所述移动臂(25)均延伸出活动槽(23),所述防灰结构(3)包括有设置在活动槽(23)中心的中心块(31),所述中心块(31)一侧贯穿设置有第一空槽(32),所述第一空槽(32)两端内部对称设置有中心挡板(33),两个所述中心挡板(33)之间设置有第一弹簧(34)。
2.根据权利要求1所述的一种农机自动驾驶装置,其特征在于,所述固定杆(26)远离移动臂(25)的一侧设置有液压缸(24),所述液压缸(24)的输出端贯穿固定杆(26)与位移杆(27)固定连接,所述移动臂(25)和位移杆(27)以及推力杆(28)均与外壳(22)内壁相接触且呈活动连接,所述固定杆(26)与外壳(22)内壁相接触且呈固定连接。
3.根据权利要求1所述的一种农机自动驾驶装置,其特征在于,所述外壳(22)上表面与固定板(21)下表面为焊接,两个所述推力杆(28)与移动臂(25)外壁为转动连接。
4.根据权利要求1所述的一种农机自动驾驶装置,其特征在于,所述中心挡板(33)与第一空槽(32)内壁呈划扣连接,所述第一弹簧(34)和中心挡板(33)与第一空槽(32)内壁均相接触呈活动连接,所述第一弹簧(34)的两端均与中心挡板(33)一侧外壁卡扣连接。
5.根据权利要求1所述的一种农机自动驾驶装置,其特征在于,所述外壳(22)外壁位于活动槽(23)两侧对称开设有第二空槽(312),两个所述第二空槽(312)内部均设有两侧挡块(310),两个所述两侧挡块(310)均与第二空槽(312)内壁均为划扣连接,两个所述第二空槽(312)内部均设有第二弹簧(311),两个所述第二弹簧(311)两端分别与两侧挡块(310)一侧外壁和第二空槽(312)内壁均为卡扣连接。
6.根据权利要求1所述的一种农机自动驾驶装置,其特征在于,所述外壳(22)外壁靠近液压缸(24)的一侧支架连接有吸风机(30),所述吸风机(30)输出端贯穿外壳(22),所述吸风机(30)输出端与外壳(22)内壁密闭连接。
7.根据权利要求1所述的一种农机自动驾驶装置,其特征在于,所述机身(1)位于分土结构(2)一侧外壁上端设置有监视器(12),所述监视器(12)与机身(1)外壁支架连接,所述机身(1)一侧外壁支架连接有报警器(13)。
技术总结
一种农机自动驾驶装置,包括机身,机身一侧设置有分土结构和防灰结构,分土结构包括有固定板,固定板一侧与机身外壁为焊接,固定板下表面连接有外壳,外壳内部对称设有移动臂,两个移动臂上端均连接有固定杆,两个移动臂内侧均对称连接有推力杆,两个推力杆上端连接有位移杆,外壳位于推力杆远离固定杆的一端开设有活动槽,防灰结构包括有设置在活动槽中心的中心块,中心块一侧贯穿设置有第一空槽,第一空槽两端内部对称设置有中心挡板。该机构在结构上设置有挡块,有效的将外面飞起的大部分灰尘阻挡在外,同时设置的吸风机能够将少部分吸入外壳内部的灰尘吸走,能够有效保证机构的运转,避免因灰尘过多可能造成的转动生涩甚至卡死。
技术研发人员:李明佳
受保护的技术使用者:云南北佑斗空间技术应用有限公司
技术研发日:20230317
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!