割草机的制作方法
本技术属于割草设备,具体涉及割草机。
背景技术:
1、割草机是一种在庭院、园林及大型草地的场景中进行割草工作的设备。传统技术中的割草机在使用时,需要布置边界线以设定割草机的工作区域,并采用接触式避障的方式使割草机的运动范围限于工作区域内。但,传统技术中通过布置边界线的布置耗时耗力,且不便于工作区域的边界识别。
技术实现思路
1、因此,本实用新型所要解决的技术问题是如何方便地识别割草机的工作区域求。
2、为解决上述技术问题,本实用新型提供一种割草机,所述割草机包括:
3、机体;
4、rtk模块,所述rtk模块设于所述机体而用于rtk定位;
5、拍摄模块,所述拍摄模块设于所述机体而用于视觉定位;
6、检测传感器,所述检测传感器设于所述机体,所述检测传感器向所述割草机的周围发射检测介质并接收反射回的所述检测介质,以用于检测障碍物。
7、可选地,上述的割草机,所述rtk模块与所述检测传感器间隔布置,沿所述机体的前进方向,所述检测传感器设于所述rtk模块的前部。
8、可选地,上述的割草机,所述rtk模块的空间位置高于所述拍摄模块和所述检测传感器。
9、可选地,上述的割草机,沿垂直所述机体前进方向的方向,所述rtk模块与所述机体两侧的距离相同。
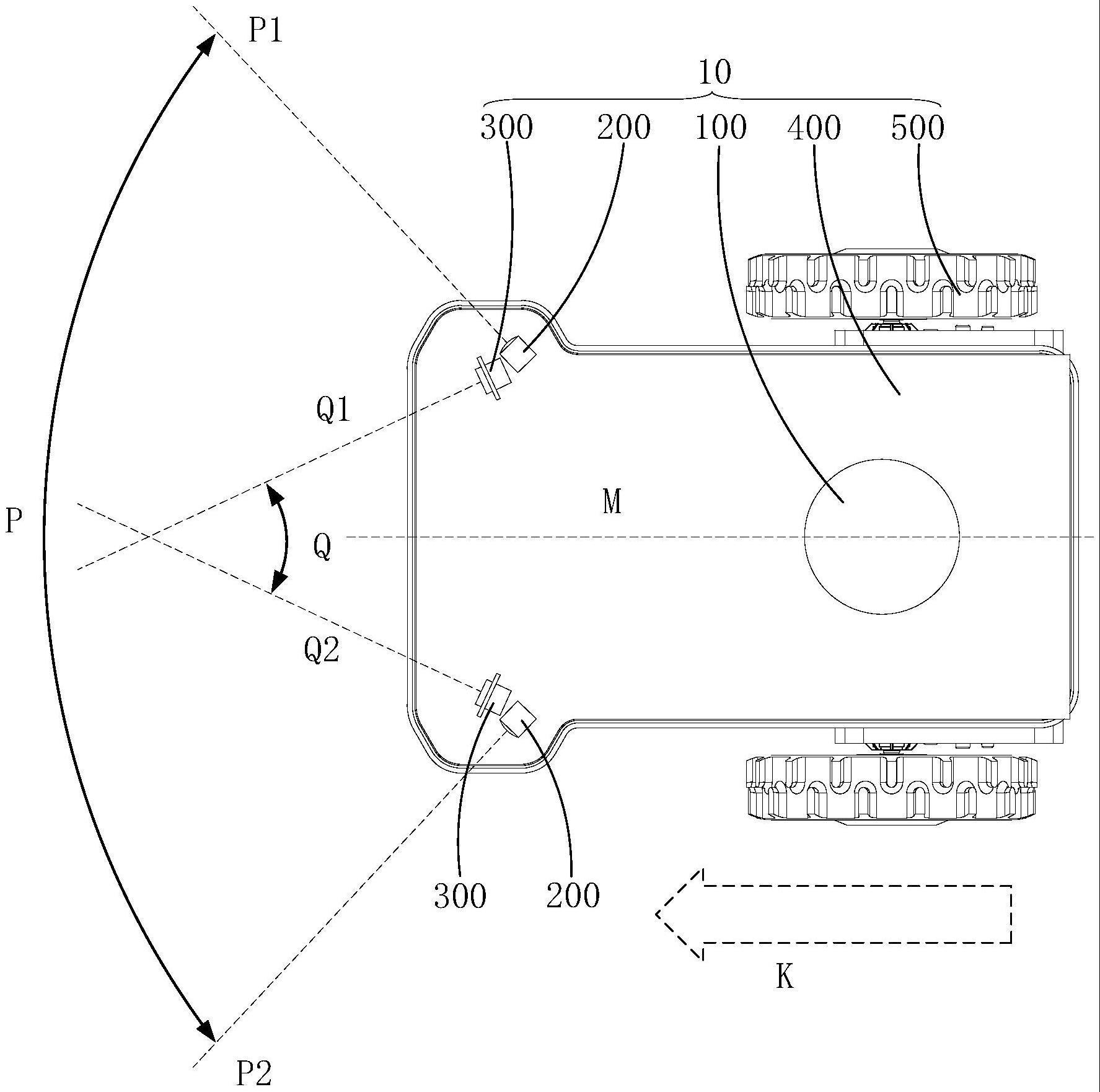
10、可选地,上述的割草机,所述检测传感器用于朝向所述机体的前方,两个所述检测传感器分别布置在所述割草机前进方向上的两侧。
11、可选地,上述的割草机,所述检测传感器发射检测介质的范围的中心线为参考线,两个所述检测传感器参考线的夹角小于或等于90°。
12、可选地,上述的割草机,两个所述拍摄模块分别布置在所述前进方向上的两侧。
13、可选地,上述的割草机,两个所述拍摄模块光轴的夹角小于或等于180°,且至少一个所述拍摄模块用于朝向所述机体的前方。
14、可选地,上述的割草机,沿所述前进方向,所述检测传感器位于所述拍摄模块前部。
15、可选地,上述的割草机,沿垂直所述前进方向的方向,所述拍摄模块相对所述检测传感器更靠近所述机体边缘。
16、可选地,上述的割草机,所述拍摄模块和/或所述检测传感器距离所述割草机所处工作面的垂直距离等于或大于200mm。
17、可选地,上述的割草机,所述rtk模块距离所述割草机所处工作面的垂直距离等于或大于220mm。
18、可选地,上述的割草机,所述检测传感器包括超声波传感器、红外线传感器及激光传感器中的至少一种。
19、可选地,上述的割草机,所述割草机还包括存储器,所述存储器用于记录所述割草机的位置数据。
20、可选地,上述的割草机,所述割草机还包括移动装置,所述移动装置与所述机体连接以带动所述机体运动。
21、本实用新型提供的技术方案,具有以下优点:
22、本实用新型提供的割草机,通过rtk模块能够对割草机整体进行rtk定位,通过拍摄模块能够对割草机整体进行视觉定位。如此,通过rtk模块结合拍摄模块对割草机的位置进行双重定位,更不容易因受干扰而影响对割草机定位的准确性,即能够提高对割草机定位的准确性,提高了割草机对工作区域边界范围判断的准确度。
23、进一步地,检测传感器通过检测介质能够实现非接触式避障,相对于传统技术中的接触式避障方式,本实施例中非接触式避障对割草机的结构强度无要求。
技术特征:
1.一种割草机,其特征在于,所述割草机包括:
2.根据权利要求1所述的割草机,其特征在于,所述rtk模块与所述检测传感器间隔布置,沿所述机体的前进方向,所述检测传感器设于所述rtk模块的前部。
3.根据权利要求1所述的割草机,其特征在于,所述rtk模块的空间位置高于所述拍摄模块和所述检测传感器。
4.根据权利要求1所述的割草机,其特征在于,沿垂直所述机体前进方向的方向,所述rtk模块与所述机体两侧的距离相同。
5.根据权利要求1所述的割草机,其特征在于,所述检测传感器用于朝向所述机体的前方,两个所述检测传感器分别布置在所述割草机前进方向上的两侧。
6.根据权利要求5所述的割草机,其特征在于,所述检测传感器发射检测介质的范围的中心线为参考线,两个所述检测传感器参考线的夹角小于或等于90°。
7.根据权利要求5所述的割草机,其特征在于,两个所述拍摄模块分别布置在所述前进方向上的两侧。
8.根据权利要求7所述的割草机,其特征在于,两个所述拍摄模块光轴的夹角小于或等于180°,且至少一个所述拍摄模块用于朝向所述机体的前方。
9.根据权利要求7所述的割草机,其特征在于,沿所述前进方向,所述检测传感器位于所述拍摄模块前部。
10.根据权利要求7所述的割草机,其特征在于,沿垂直所述前进方向的方向,所述拍摄模块相对所述检测传感器更靠近所述机体边缘。
11.根据权利要求1所述的割草机,其特征在于,所述拍摄模块和/或所述检测传感器距离所述割草机所处工作面的垂直距离等于或大于200mm。
12.根据权利要求1所述的割草机,其特征在于,所述rtk模块距离所述割草机所处工作面的垂直距离等于或大于220mm。
13.根据权利要求1至12任意一项所述的割草机,其特征在于,所述检测传感器包括超声波传感器、红外线传感器及激光传感器中的至少一种。
14.根据权利要求1所述的割草机,其特征在于,所述割草机还包括存储器,所述存储器用于记录所述割草机的位置数据。
15.根据权利要求1所述的割草机,其特征在于,所述割草机还包括移动装置,所述移动装置与所述机体连接以带动所述机体运动。
技术总结
本技术公开一种割草机,所述割草机包括机体、RTK模块、拍摄模块及检测传感器,所述RTK模块设于所述机体而用于RTK定位;所述拍摄模块设于所述机体而用于视觉定位;所述检测传感器设于所述机体,所述检测传感器向所述割草机的周围发射检测介质并接收反射回的所述检测介质,以用于检测障碍物。通过RTK模块结合拍摄模块对割草机的位置进行双重定位,更不容易因受干扰而影响对割草机定位的准确性,即能够提高对割草机定位的准确性,提高了割草机对工作区域边界范围判断的准确度。并且,检测传感器通过检测介质能够实现非接触式避障,相对于接触式避障,非接触式避障对割草机的结构强度无要求。
技术研发人员:陈斌斌,刘斌,张杰
受保护的技术使用者:追觅创新科技(苏州)有限公司
技术研发日:20230329
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!