支架和自动机器人的制作方法
本申请涉及机械设备,尤其涉及一种支架和自动机器人。
背景技术:
1、随着科技的发展,越来越多的自动机器人可以替代人工,减轻人们的体力劳动。例如割草机是一种用于修理绿化带或草坪的自动机器人,其可以自动剪草,减轻人们修理草坪的负担。
2、自动机器人可以包括万向轮、底壳、电池包以及其他的功能件,万向轮安装在底壳上。在自动机器人被搬起时,万向轮会落下,电池包和功能件也可以安装在底壳上。其中,功能件可以为gps导航模块,也可以为霍尔传感器,霍尔传感器可以用于检测万象轮的位置,以用来判断机器是否被搬起。
3、现有技术中,电池包、各功能件分别单独安装在底壳上,这种安装方式导致固定结构多,零件数量多,装配和维护相对复杂。
技术实现思路
1、为了解决上述问题,本申请实施例提供了一种支架和自动机器人,以至少部分地解决上述问题。
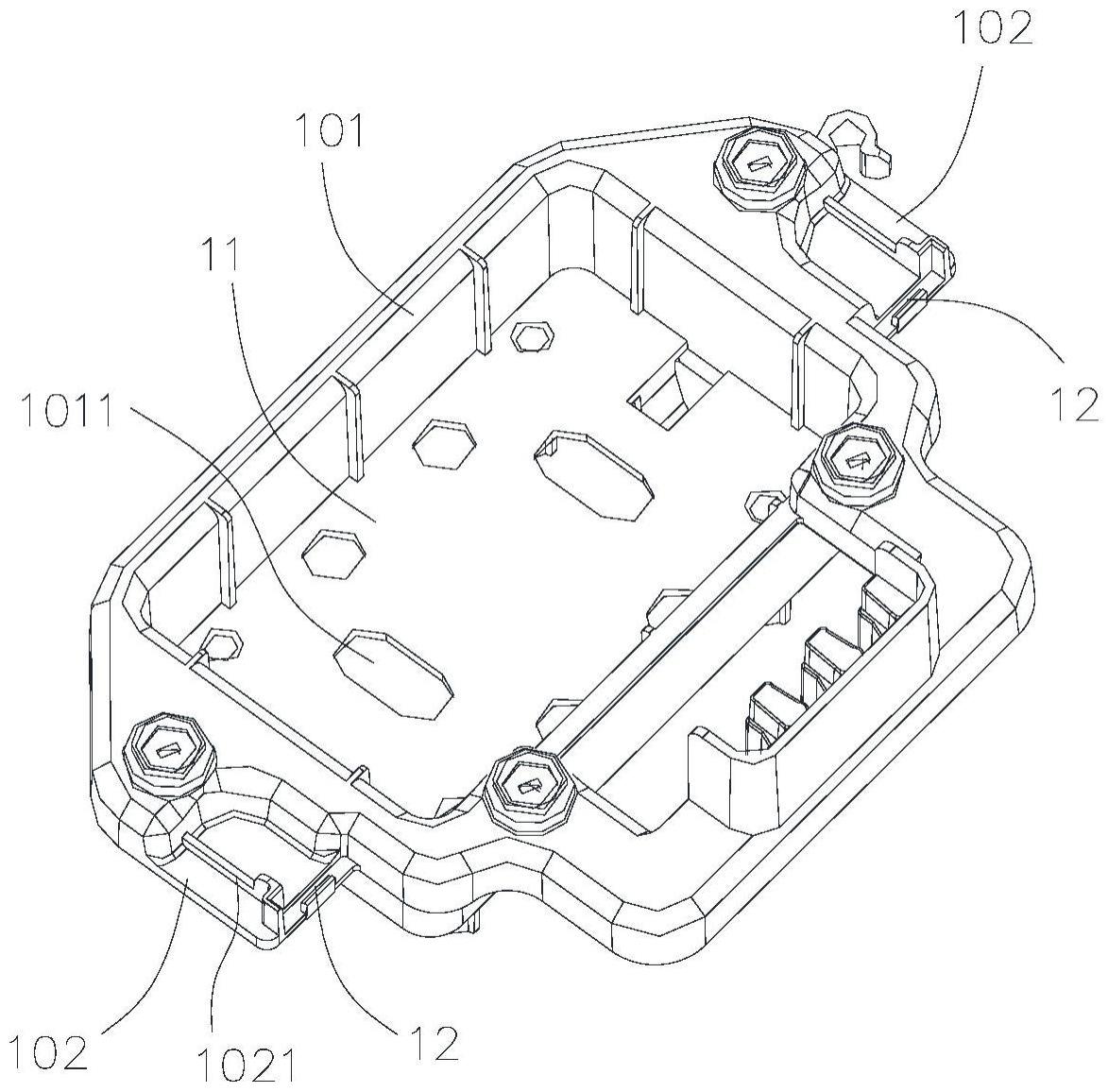
2、第一方面,本申请的一个或多个实施例提供了一种支架,所述支架包括主体,所述主体上设置有第一安装结构和第二安装结构,所述第一安装结构和所述第二安装结构位于所述主体的相对两侧;当所述支架安装在割草机的底壳上时,所述第一安装结构朝向所述底壳,所述第一安装结构与所述底壳配合以限位所述割草机的第一功能件,所述第二安装结构用于安装所述割草机的第二功能件。
3、可选的,所述第一安装结构为形成在所述主体上的第一容纳槽,所述第一容纳槽能够容纳所述第一功能件。
4、可选的,所述第二安装结构为设置在所述主体表面的凸柱,所述第二功能件安装在所述凸柱上,所述第二功能件与所述主体之间具有间隙。
5、可选的,所述支架还包括朝向所述底壳的第三安装结构,所述第一安装结构和所述第三安装结构位于所述支架的同一侧,所述第三安装结构与所述底壳配合以限位所述割草机的第三功能件。
6、可选的,所述第三安装结构为第二容纳槽,所述第二容纳槽能够容纳所述第三功能件。
7、可选的,所述支架还包括与所述主体连接的耳板,所述第三安装结构设置在所述耳板上。
8、可选的,所述耳板的数量为两个,两个所述耳板关于所述主体对称分布,所述耳板上设置有第一连接部,所述第一连接部用于连接所述底壳。
9、第二方面,本申请还提供一种自动机器人,所述自动机器人包括第一功能件、第二功能件、底壳和上述的支架,所述第一功能件被限位在所述支架和所述底壳之间,所述第二功能件安装在所述第二安装结构上。
10、可选的,所述底壳上设置有第一安装部,第一安装部朝向并对准所述第一安装结构,所述第一功能件被限位在所述第一安装部和所述第一安装结构之间,所述第二功能件位于所述支架的背离所述底壳的一侧。
11、可选的,所述第一安装部为设置在所述底壳上的第一凹槽,所述第一功能件容纳于所述第一凹槽。
12、可选的,所述第一功能件包括储能件;所述第二功能件包括通讯件或定位件。
13、可选的,所述自动机器人为割草机。
14、基于本申请提供的上述支架,一方面,一个支架可以用于同时将两个功能件安装在自动机器人的底壳上,集成度高,可以减少使用的零件数量,有利于简化自动机器人的装配步骤,提高生产效率。另一方面,由于第一安装结构和第二安装结构位于主体的相对两侧,如此分布可以充分利用主体相对两侧的空间,可以减小第一功能件、第二功能件和支架装配在一起后整体的体积,利于节省自动机器人的内部空间,有利于自动机器人的小型化设计。
技术特征:
1.一种支架,其特征在于,所述支架(10)包括主体(101),所述主体(101)上设置有第一安装结构(11)和第二安装结构(12),所述第一安装结构(11)和所述第二安装结构(12)位于所述主体(101)的相对两侧;
2.根据权利要求1所述的支架,其特征在于,所述第一安装结构(11)为形成在所述主体(101)上的第一容纳槽,所述第一容纳槽能够容纳所述第一功能件(201)。
3.根据权利要求1所述的支架,其特征在于,所述第二安装结构(12)为设置在所述主体(101)表面的凸柱,所述第二功能件(202)安装在所述凸柱上,所述第二功能件(202)与所述主体(101)之间具有间隙。
4.根据权利要求1所述的支架,其特征在于,所述支架(10)还包括朝向所述底壳(20)的第三安装结构(13),所述第一安装结构(11)和所述第三安装结构(13)位于所述支架(10)的同一侧,所述第三安装结构(13)与所述底壳(20)配合以限位所述割草机的第三功能件(203)。
5.根据权利要求4所述的支架,其特征在于,所述第三安装结构(13)为第二容纳槽,所述第二容纳槽能够容纳所述第三功能件(203)。
6.根据权利要求4所述的支架,其特征在于,所述支架(10)还包括与所述主体(101)连接的耳板(102),所述第三安装结构(13)设置在所述耳板(102)上。
7.根据权利要求6所述的支架,其特征在于,所述耳板(102)的数量为两个,两个所述耳板(102)关于所述主体(101)对称分布,所述耳板(102)上设置有第一连接部(14),所述第一连接部(14)用于连接所述底壳(20)。
8.一种自动机器人,其特征在于,所述自动机器人包括第一功能件(201)、第二功能件(202)、底壳(20)和上述权利要求1-7中任一项所述的支架(10),所述第一功能件(201)被限位在所述支架(10)和所述底壳(20)之间,所述第二功能件(202)安装在所述第二安装结构(12)上。
9.根据权利要求8所述的自动机器人,其特征在于,所述底壳(20)上设置有第一安装部(21),
10.根据权利要求9所述的自动机器人,其特征在于,所述第一安装部(21)为设置在所述底壳(20)上的第一凹槽,所述第一功能件(201)容纳于所述第一凹槽。
11.根据权利要求8所述的自动机器人,其特征在于,所述第一功能件(201)包括储能件;所述第二功能件(202)包括通讯件或定位件。
12.根据权利要求8所述的自动机器人,其特征在于,所述自动机器人为割草机。
技术总结
本技术提供一种支架和自动机器人,所述支架包括主体,所述主体上设置有第一安装结构和第二安装结构,所述第一安装结构和所述第二安装结构位于所述主体的相对两侧;当所述支架安装在割草机的底壳上时,所述第一安装结构朝向所述底壳,所述第一安装结构与所述底壳配合以限位所述割草机的第一功能件,所述第二安装结构用于安装所述割草机的第二功能件。由此,一个支架可以同时将两个功能件安装在割草机底壳上,集成度高,可以减少使用的零件数量,且可以充分利用主体相对两侧的空间,减小第一功能件、第二功能件和支架装配在一起后整体的体积,利于割草机的小型化设计。
技术研发人员:翟东延,李增洋,崔俊伟,乔万阳
受保护的技术使用者:未岚大陆(北京)科技有限公司
技术研发日:20230331
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!