一种吊轨式精准加药饲喂机器人
本技术涉及智能畜牧养殖装备,具体是指一种吊轨式精准加药饲喂机器人。
背景技术:
1、如今世界畜禽疫病大流行,给各个国家的畜禽养殖都带来了极大的困扰,在精准投料饲喂前实现均匀变量加药,既满足了畜禽的营养需求、提高了饲料利用率,又提高了畜禽免疫力,有效实现了疫病防控。在对畜禽饲料均匀变量加药进行疫病预防时,我国养殖场一般采用料线输送饲料并定量落料到集料斗,然后再人工将药物加入到饲料中的饲喂方式。
2、由于现有的这种饲喂方式不能根据畜类个体(牛、猪等)或禽类群体(如鸡、鸭等)的用药量差异进行按需添加,并且在料线输送过程中,人工加药与饲料逐渐分离并沉积到料线管道的底部,造成了药物有效利用率低,疫病防控效果差等问题。
技术实现思路
1、本实用新型针对现有技术的不足,提供一种吊轨式精准加药饲喂机器人,可视觉识别畜类个体或禽类群体,根据个体或群体需料量和需药量进行精准加药饲喂。
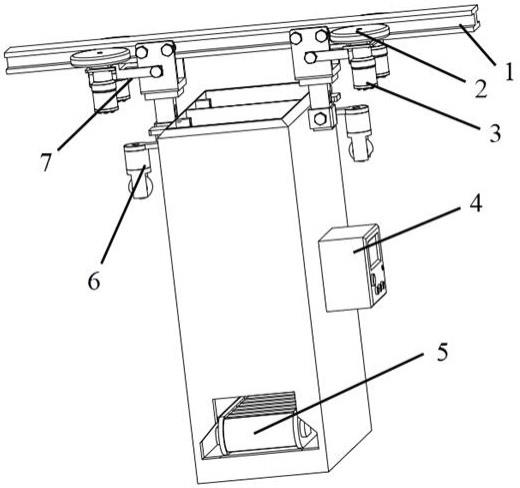
2、本实用新型是通过如下技术方案实现的,提供一种吊轨式精准加药饲喂机器人,包括主机架,以及驱动所述主机架沿导轨移动的动力装置,所述主机架上固设有掺混筒和位于掺混筒上方的至少两料仓,料仓的出料口连接有落料管,所述落料管上安装有槽轮式放料机构,各落料管的下端均与所述掺混筒的入料口对应;所述掺混筒内安装有混料装置,掺混筒的下端设有排料口,排料口的下方设有安装在所述主机架上的投料输送带。
3、本方案设置主机架,使机器人形成一个整体机器,通过动力装置带动整机沿导轨移动,既实现了在各饲喂位置及装料位置之间的移动,同时提高了整机移动的稳定性;通过设置至少两料仓,以方便将饲料和药物分开放置,通过设置槽轮式放料机构,便于控制饲料和药物的落料速度,从而控制饲料与药物两者之间的配比;从落料管落下的物料进入同一掺混筒内,并在混料装置的作用下实现混合,混合后的饲料和药物落至投料输送带,通过投料输送带将饲料和药物的混合物投至饲喂位置。
4、作为优化,所述掺混筒包括上大下小的锥筒和固接于所述锥筒下端的直筒,各落料管的下端均延伸至所述锥筒,所述混料装置安装在所述直筒内腔。本优化方案的掺混筒通过设置的锥筒,增大了收料面积,避免落料管中落下的物料迸溅,通过设置的直筒内腔给混料装置提供安装空间,便于物料下落。
5、作为优化,所述混料装置包括尖端朝上且与所述直筒同轴的混料锥,混料锥通过支撑杆与直筒固接,混料锥与直筒的侧壁之间形成落料通道。本优化方案的混料装置采用混料锥的结构型式,利用混料锥的斜面与物料碰撞,并便于物料向下滑落,经落料通道落下,整体结构简单,制作方便。
6、作为优化,所述料仓为两件,两落料管位于槽轮式放料机构下方的部分倾斜设置,且两落料管的下端出料口相对设置。本优化方案通过设置的两料仓,分别用于盛放饲料和药物,满足了饲料与药物分开放置的使用要求,将落料管的下部倾斜且相对设置,使得从两落料管流出的物料相互交叉,提高了混料效果。
7、作为优化,所述主机架为壳体结构,所述落料管、槽轮式放料机构和掺混筒均位于主机架的内腔。本优化方案将主机架设置为壳体结构,对落料管、槽轮式放料机构和掺混筒起到防护作用,避免杂物混入到饲料中。
8、作为优化,还包括智能控制系统,以及安装在所述主机架上的图像采集装置,所述图像采集装置、动力装置和槽轮式放料机构均与所述智能控制系统电性连接。本优化方案通过图像采集装置采集待饲喂的畜禽图像,智能控制系统根据畜禽种类控制槽轮式放料机构的放料速度,及动力装置驱使整机的移动速度,使得饲料量、药物量均与畜禽相匹配,避免药物量浪费或不足。
9、作为优化,所述料仓内安装有料位检测装置,所述料位检测装置与所述智能控制系统电性连接。本优化方案通过设置的料位检测装置检测料仓内的物料料位,当料位低于设定值时,智能控制系统控制整机移动至加料处,进行饲料或药物的添加。
10、本方案还提供一种使用上述吊轨式精准加药饲喂机器人进行的饲喂方法,包括以下步骤:
11、1、将饲料放入其中一个料仓,将药物放入另一料仓,根据养殖场的大小和机器到动物的距离,通过控制器设置好机器的行进速度,通过控制器向智能控制系统输入数据后,整机在电动马达的驱动下向前运动;
12、2、机器向前运动时,图像采集装置拍摄要饲喂畜禽的图像,对于群养禽类(如鸡、鸭等),将捕捉到拍摄的图像进行图像分割并计算需要饲喂的动物数量,智能控制系统根据动物的数量计算出所需要的投喂饲料和药物的量;对于饲喂的畜类(如牛、猪等),通过图像采集装置拍摄到的图像对饲喂个体进行身份识别,然后根据个体需料量和用药量进行计算,并由此控制两个槽轮式放料机构的放料速度,饲料和药物在掺混筒内与混料锥碰撞掺混均匀后下落到投料输送带上,智能控制系统控制投料输送带的电机正或反转将加入药物的饲料投喂给观测对象;
13、3、在机器返回时,通过另一侧的图像采集装置对要饲喂的畜禽进行图像采集并重复上述操作,最终完成对全部畜禽的加药饲喂工作;
14、4、在饲喂的过程中,当料位检测装置检测到料仓中的饲料或药物不足时,向智能控制系统传递信号,智能控制系统在接受信号后记录当前的行进位置,并控制电动马达驱动整机快速返回,装填完毕后,再驱动整机回到记录的位置。
15、本实用新型的有益效果为:
16、1、根据需求用计量式槽轮对饲料量和药物量进行控制,并根据检测到的畜类个体或禽类群体进行饲喂,计量式槽轮排量稳定,排料精度高,每转的排料量相同,可确保每个动物的进食量和用药量,实现对畜禽的精准饲喂,很大程度上避免了饲料和药物掺混不均匀对畜禽免疫力的影响,保证了畜禽进食量和用药量的同时,也很大程度上避免了药物的浪费。
17、2、机器在装填饲料和药物后沿着吊轨运动对动物进行饲喂,与传统饲喂方式相比,吊轨式精准加药饲喂机器人所占用的空间更小,可按照轨道进行定向移动。此过程中不需要再进行人工操作,节省了人工成本,降低了操作难度,同时也降低了对人和动物健康的影响。
18、3、本机器的图像采集装置形成机器视觉系统,可对畜类个体或禽类群体位置和数量进行识别从而进行加药,提高加药效率的同时节省了饲料和药物降低了成本。
技术特征:
1.一种吊轨式精准加药饲喂机器人,其特征在于:包括主机架,以及驱动所述主机架沿导轨(1)移动的动力装置,所述主机架上固设有掺混筒(19)和位于掺混筒(19)上方的至少两料仓(15),料仓(15)的出料口连接有落料管(17),所述落料管(17)上安装有槽轮式放料机构,各落料管的下端均与所述掺混筒的入料口对应;
2.根据权利要求1所述的一种吊轨式精准加药饲喂机器人,其特征在于:所述掺混筒包括上大下小的锥筒和固接于所述锥筒下端的直筒,各落料管的下端均延伸至所述锥筒,所述混料装置安装在所述直筒内腔。
3.根据权利要求2所述的一种吊轨式精准加药饲喂机器人,其特征在于:所述混料装置包括尖端朝上且与所述直筒同轴的混料锥,混料锥通过支撑杆与直筒固接,混料锥与直筒的侧壁之间形成落料通道。
4.根据权利要求1所述的一种吊轨式精准加药饲喂机器人,其特征在于:所述料仓为两件,两落料管位于槽轮式放料机构下方的部分倾斜设置,且两落料管的下端出料口相对设置。
5.根据权利要求1所述的一种吊轨式精准加药饲喂机器人,其特征在于:所述主机架为壳体结构,所述落料管、槽轮式放料机构和掺混筒均位于主机架的内腔。
6.根据权利要求1所述的一种吊轨式精准加药饲喂机器人,其特征在于:还包括智能控制系统,以及安装在所述主机架上的图像采集装置(6),所述图像采集装置、动力装置和槽轮式放料机构均与所述智能控制系统电性连接。
7.根据权利要求6所述的一种吊轨式精准加药饲喂机器人,其特征在于:所述料仓内安装有料位检测装置(14),所述料位检测装置与所述智能控制系统电性连接。
技术总结
本技术涉及一种吊轨式精准加药饲喂机器人,包括主机架,以及驱动主机架沿导轨移动的动力装置,主机架上固设有掺混筒和两料仓,料仓的出料口连接有落料管,落料管上安装有槽轮式放料机构;掺混筒内安装有混料装置,掺混筒的下方设有安装在主机架上的投料输送带。本技术根据需求用计量式槽轮对饲料量和药物量进行控制,并根据检测到的畜类个体或禽类群体进行饲喂,计量式槽轮排量稳定,排料精度高,可确保每个动物的进食量和用药量,实现对畜禽的精准饲喂,很大程度上避免了饲料和药物掺混不均匀对畜禽免疫力的影响,保证了畜禽进食量和用药量的同时,也很大程度上避免了药物的浪费。
技术研发人员:闫银发,刘冠鲁,刘莫尘,赵梦娟,熊竹青,陈怡然,崔明诗,李法德,宋占华,田富洋,李玉道,杨庆璐,于镇伟,鹿瑶
受保护的技术使用者:山东农业大学
技术研发日:20230413
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!