可更换执行末端的多功能果蔬采摘机器人
本技术涉及农业机械,尤其涉及农业采摘机器人领域,具体是指一种可更换执行末端的多功能果蔬采摘机器人及其使用方法。
背景技术:
1、采摘是果蔬生产链条中最耗时、最耗力的环节,目前,果蔬的采摘工作在我国仍然是以人工为主,劳动强度大、成本高,采摘效率低。在果农的经营成本中,雇佣采摘工人的费用占据了 50%~70%。近些年来,农业劳动力不足,人口老龄化进一步加剧了农业劳动力的短缺,雇佣农工的成本逐年增高。在果蔬生产作业中,收获采摘是费力最大、耗时最多的一个环节。
2、为了解决人工采摘存在的问题,在不同场景的果蔬采摘中,选择相应的农业机器人整机进行采摘工作,不同类型的果蔬需要使用不同的机器人,投入成本高,给果农造成较大的经济负担。
3、果蔬采摘时要识别果实的成熟度,对果实的空间坐标定位,机械臂-采摘末端选择性采摘。随着机器人、机器视觉、人工智能等技术的发展,机器换人实现自动化、智能化的高效低损采摘是标准化设施立体种植果蔬产业发展的必然趋势。因此,需要开发一种可更换执行末端的多功能果蔬采摘机器人替代人工采摘,来解决上述问题。
技术实现思路
1、本实用新型针对现有技术的不足,提供一种可更换执行末端的多功能果蔬采摘机器人及其使用方法,实现了对果蔬的空间立体化采摘,并且采用可更换的执行末端,可应对不同的采摘场景,采摘不同果蔬时只需要更换相应的执行末端,方便高效,节约成本。
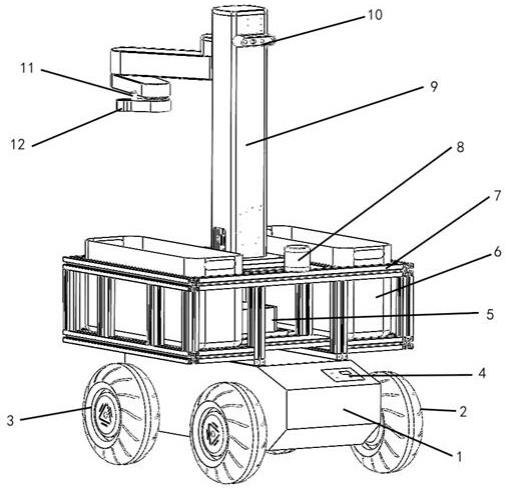
2、本实用新型是通过如下技术方案实现的,提供一种可更换执行末端的多功能果蔬采摘机器人,包括自走驱动系统,以及安装在所述自走驱动系统上的采摘装置和果实收集装置;
3、所述采摘装置包括沿竖向向上延伸的scara臂、安装在scara臂执行端的末端执行器和安装在末端执行器上的果蔬识别摄像头,scara臂的前侧面安装有位于自走驱动系统上方的路况识别摄像头,果蔬识别摄像头、路况识别摄像头和自走驱动系统均电性连接控制器;所述果实收集装置包括分别位于scara臂左、右两侧的两收集框,收集框顶部开口位于末端执行器卸料位的下方。
4、本方案在使用时,通过自走驱动系统实现机器人的行走,在行走过程中,通过路况识别摄像头采集并反馈路况信息,控制器根据路况信息控制行走路线,以实现避障,在采摘时,通过果蔬识别摄像头采集并反馈果实的形状、大小等信息,以对果实分级;通过scara臂带动末端执行器移动至采摘位置并完成采摘,采摘后的果实根据分级情况放置于相应的收集框中。
5、作为优化,所述自走驱动系统包括安装有行走轮和转向轮的机器人底盘,以及固接于所述机器人底盘上表面的固定平台,固定平台上设有与所述收集框适配的放置槽,两放置槽之间固设有与scara臂下端通过螺栓固接的连接座。本优化方案通过机器人底盘作为安装载体,通过设置放置槽 ,便于保证收集框放置的稳定性,通过设置连接座,便于安装scara臂。
6、作为优化,固定平台的顶部安装有位于scara臂前方的激光雷达。本优化方案通过设置激光雷达,便于对机器人进行实时定位。
7、作为优化,所述固定平台包括上底盘,以及固接于上底盘下表面的若干支撑柱,各支撑柱沿周向排布,支撑柱的下端与机器人底盘固接,上底盘与机器人底盘之间的空腔内设有工控机,放置槽的槽口开设在所述上底盘。本优化方案的固定平台设置,使得上底盘与机器人底盘之间形成空腔,既利于减轻整机重量,又方便对工控机形成防护。
8、作为优化,所述scara臂包括立柱、与立柱沿竖向滑接的第一机械臂和驱动所述第一机械臂沿竖向移动的第一驱动电机,第一机械臂远离立柱的一端通过第一竖轴转动连接有第二机械臂,第二机械臂远离第一机械臂的一端通过第二竖轴转动连接有第三机械臂,第三机械臂远离第二机械臂的一端通过第三竖轴与所述末端执行器转动连接,所述第一机械臂、第二机械臂和第三机械臂均沿横向延伸;所述scara臂还包括驱动第二机械臂绕第一竖轴轴线转动的第二驱动电机、驱动第三机械臂绕第二竖轴轴线转动的第三驱动电机,以及驱动末端执行器绕第三竖轴轴线转动的第四驱动电机。本优化方案的scara臂实现了执行末端的竖向和横向的位置移动,以及采摘角度的调整,进一步提高了采摘效率。
9、本方案还提供一种上述果蔬采摘机器人的使用方法,具体为:通过自走驱动系统实现机器人行走,在机器人行走过程中,通过路况识别摄像头将前方行间道路信息实时反馈至控制器,以实现避障行走,并由激光雷达进行实时定位;在采摘果实的过程中,由果蔬识别摄像头对果实图像识别,根据果实的形状及大小进行分级,并根据分级结果将果实放入相应侧的收集框中。
10、本实用新型的有益效果为:
11、1、采用scara臂作为果蔬采摘装置的主体机构,利用scara臂较大的工作空间、准确的工作精度及轻便灵活的特点,更加适合于高架栽培模式的果蔬采摘;scara臂前端末端执行器上方与摄像头组合,在采摘时摄像头对果实信息识别,识别可视区域物体的类型、采摘果实的特征参数,并获取位置信息,各机械臂相互配合,有较大的工作范围,可运动到空间内不同位置,实现果实空间立体化的精准采摘,省去了人力操作的麻烦,提高了作业准确率。
12、2、采用分级的果实收集装置,两侧收集框可对不同大小品质的果实分选,放入两个收集框中,收集完的不同品质的果实,可减少人工分拣环节,降低了劳动成本。
13、3、该实用新型设备结构简单,设计合理,可以对行间道路导航定位,实现自动化采摘果实,大大节约了农民的时间,降低了劳动强度,提高了经济效益。
技术特征:
1.一种可更换执行末端的多功能果蔬采摘机器人,其特征在于:包括自走驱动系统,以及安装在所述自走驱动系统上的采摘装置和果实收集装置;
2.根据权利要求1所述的可更换执行末端的多功能果蔬采摘机器人,其特征在于:所述自走驱动系统包括安装有行走轮(3)和转向轮(2)的机器人底盘(1),以及固接于所述机器人底盘上表面的固定平台(7),固定平台(7)上设有与所述收集框(6)适配的放置槽,两放置槽之间固设有与scara臂下端通过螺栓固接的连接座。
3.根据权利要求2所述的可更换执行末端的多功能果蔬采摘机器人,其特征在于:固定平台的顶部安装有位于scara臂(9)前方的激光雷达(8)。
4.根据权利要求2所述的可更换执行末端的多功能果蔬采摘机器人,其特征在于:所述固定平台(7)包括上底盘,以及固接于上底盘下表面的若干支撑柱,各支撑柱沿周向排布,支撑柱的下端与机器人底盘固接,上底盘与机器人底盘之间的空腔内设有工控机(5),放置槽的槽口开设在所述上底盘。
5.根据权利要求1所述的可更换执行末端的多功能果蔬采摘机器人,其特征在于:所述scara臂包括立柱、与立柱沿竖向滑接的第一机械臂(19)和驱动所述第一机械臂沿竖向移动的第一驱动电机,第一机械臂远离立柱的一端通过第一竖轴(18)转动连接有第二机械臂(17),第二机械臂(17)远离第一机械臂(19)的一端通过第二竖轴(16)转动连接有第三机械臂(15),第三机械臂(15)远离第二机械臂(17)的一端通过第三竖轴(20)与所述末端执行器(12)转动连接,所述第一机械臂(19)、第二机械臂(17)和第三机械臂(15)均沿横向延伸;
技术总结
本技术涉及一种可更换执行末端的多功能果蔬采摘机器人,包括自走驱动系统,以及安装在自走驱动系统上的采摘装置和果实收集装置;采摘装置包括沿竖向向上延伸的SCARA臂、末端执行器和安装在末端执行器上的果蔬识别摄像头,SCARA臂的前侧面安装有位于自走驱动系统上方的路况识别摄像头,果蔬识别摄像头、路况识别摄像头和自走驱动系统均电性连接控制器;所述果实收集装置包括分别位于SCARA臂左、右两侧的两收集框,收集框顶部开口位于末端执行器卸料位的下方。本技术采用SCARA臂作为果蔬采摘装置的主体机构,利用SCARA臂较大的工作空间、准确的工作精度及轻便灵活的特点,实现空间立体化精准采摘。
技术研发人员:闫银发,熊竹青,杨化伟,刘莫尘,褚镇源,崔明诗,吴杰,李法德,王金星,宋占华,田富洋,杨庆璐,于镇伟,鹿瑶
受保护的技术使用者:山东农业大学
技术研发日:20230425
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!