宠物智能喂食装置的制作方法
本技术属于宠物用具,尤其涉及一种宠物智能喂食装置。
背景技术:
1、宠物自动喂食器是一种能放入宠物粮的容器,可以设置好时间和食量,喂食机将自动定时定量的进行投喂,能让宠物“一日三餐”有着落。自动喂食器在宠物主加班、出差或者平时没时间喂宠物的时候,自动给宠物投食,这样大大方便了宠物主。
2、例如,申请号为:cn202220585003.6名称为一种宠物自动喂食装置的实用新型专利提及:一种宠物自动喂食装置,包括底座、筒体和出粮组件。底座上设置有盛粮槽,筒体设置于底座上,筒体内限定出第一粮仓和第二粮仓,出粮组件包括出粮筒和送粮叶轮,送粮叶轮上设置有第一叶轮仓和第二叶轮仓,第一叶轮仓与第一粮仓连通,第二叶轮仓与第二粮仓连通,送粮叶轮反复正反向转动即可使出粮口交替流出不同类型的宠物粮,以供宠物食用,实现自动喂食。该宠物自动喂食装置既能够使宠物吃到不同类型的宠物粮,保证宠物摄取的营养均衡,又能够避免不同宠物粮因混合存放变质而导致宠物健康受影响,同时也避免了不同宠物粮混合存放后营养流失的问题,能够有效保证宠物粮的食用效果”。
3、由上述
技术实现要素:
可得,现有技术中的宠物喂食器为了提高宠物饮食平衡,已然实现双仓、甚至多仓宠物粮混合自动喂养的结构成型。
4、上述宠物喂食器乃至传统的宠物喂食器中,虽逐渐呈现多功能化,例如,多仓喂食、定时喂食等,然而,对于宠物粮仓的信息反馈方面存在缺陷,例如,上述专利提及的宠物喂食器中,虽然宠物粮仓位置设置有观察视窗,但是观察视窗存在局限性,例如,只有当宠物主主动观察,才能获取信息,而宠物喂食器一般都是置放在地面上,宠物主需要躬身才能做观察动作,导致观察窗使用不便,该可观察视窗结构也是传统宠物喂食器的通用结构;同时,上述旋转式送粮结构中,由于宠物粮是堆积在叶轮仓中,叶轮仓旋转过程中,顶层的宠物粮容易与叶轮仓和粮仓的边沿抵接,导致卡粮,以及,因此,出粮位置的宠物粮是否顺利输出可以作为堵粮判定条件,在喂食器工作状态下,出粮位置若长时间未输出宠物粮,则极有可能其内部或出粮位置存在堵粮情况,但是传统宠物喂食器并未设置有检测出粮位置宠物粮状况的方案。
5、综上所述,现有技术中的宠物喂食器并没有解决上述问题的对应方案,导致传统的宠物喂食器使用便捷程度下降,逐渐无法满足消费者的需求,亟待改善。
技术实现思路
1、本实用新型的目的在于提供一种宠物智能喂食装置,旨在解决现有技术中的宠物喂食器无法妥善解决结构中多处卡粮和粮仓监控的技术问题。
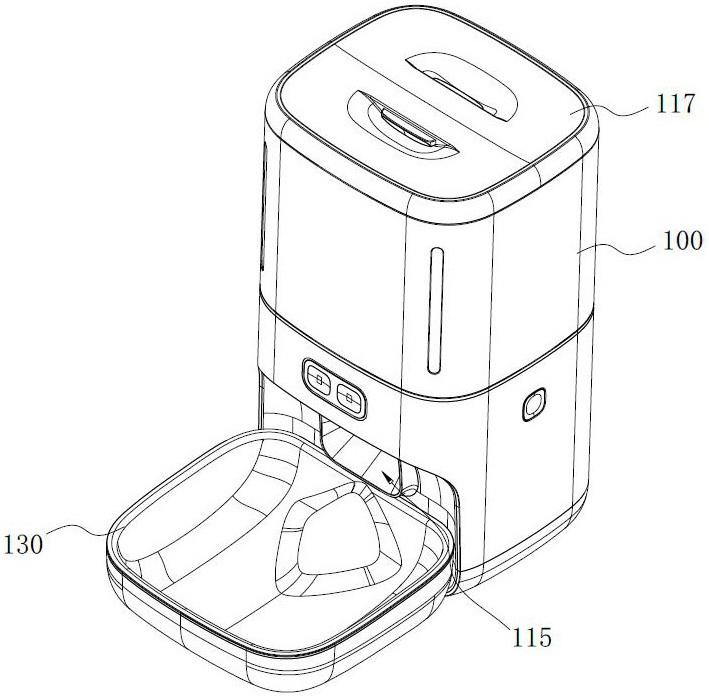
2、为实现上述目的,本实用新型实施例提供的一种宠物智能喂食装置,包括载粮机构和余粮检测机构,所述载粮机构设置有用于装载宠物粮的载粮型腔;所述余粮检测机构设置在所述载粮型腔内且用于监控所述载粮型腔内的宠物粮存量;其中,所述载粮型腔的出粮位置设置有用于检测是否堵粮的卡粮检测机构。
3、可选地,所述余粮检测机构包括第一传感器和提醒模块,所述第一传感器设置在所述载粮型腔内且位于出粮位置的一侧,所述提醒模块与所述第一传感器信号连接且用于提醒宠物主余粮情况。
4、可选地,所述第一传感器为红外传感器或光栅传感器,所述载粮型腔内的宠物粮受重力能够移动至所述第一传感器的感应路径上。
5、可选地,所述提醒模块包括指示灯和控制中心,所述控制中心与所述第一传感器信号连接,所述指示灯与所述控制中心电连接,所述控制中心根据所述第一传感器的信号反馈驱动所述指示灯开启或关闭。
6、可选地,所述卡粮检测机构包括第二传感器和指示模块,所述载粮型腔设置有出粮口,所述第二传感器设置在所述出粮口的内壁上,所述指示模块与所述第二传感器信号连接,所述第二传感器的感应路径经过所述出粮口。
7、可选地,所述载粮机构包括载粮仓、出粮组件和粮盒,所述载粮型腔成型在所述载粮仓内;所述出粮组件设置在所述载粮仓的出粮位置;所述粮盒设置在所述载粮型腔的出粮位置;其中,所述出粮组件上成型有转载槽,所述出粮组件位于所述载粮仓和所述粮盒之间,所述余粮检测机构和所述卡粮检测机构均设置在所述载粮仓内。
8、可选地,所述载粮仓包括安装座和载粮框,所述安装座上设置有开口型腔,所述出粮组件设置在所述开口型腔内;所述载粮框可拆卸连接在所述开口型腔上,所述载粮型腔成型在所述载粮框内;其中,所述开口型腔设置有输入口和输出口,所述载粮框可拆卸安装在所述输入口,所述粮盒可拆卸安装在所述输出口。
9、可选地,所述出粮组件包括安装架、旋转座和驱动源,所述安装架设置在所述安装座上且位于所述开口型腔内;所述旋转座转动连接在所述安装架;所述驱动源与所述旋转座驱动连接;其中,所述转载槽成型在所述旋转座上,所述安装架上设置有连通所述载粮型腔的过料孔,所述转载槽随所述旋转座旋转能够往复移动在所述过料孔和所述输出口之间,使所述转载槽循环依次连通所述过料孔和所述输出口。
10、可选地,所述驱动源包括驱动电机和控制模块,所述驱动电机设置在所述安装座上,所述驱动电机与所述旋转座驱动连接,所述控制模块与所述驱动电机电性连接且控制所述驱动电机的输出主轴往预设方向旋转。
11、可选地,所述控制模块包括控制电路板和旋转角度传感器,所述控制电路板设置在所述安装座内,所述旋转角度传感器设置在所述驱动电机的输出主轴上,所述控制电路板与所述驱动电机电性驱动连接,所述旋转角度传感器与所述控制电路板信号连接。
12、本实用新型实施例提供的宠物智能喂食装置中的上述一个或多个技术方案至少具有如下技术效果之一:当载粮型腔内的宠物粮余量不足时,余粮检测机构的检测端检测到余粮实时状况后,提示宠物主添加宠物粮;在喂食装置启动后,卡粮检测机构检测到喂食装置的出粮位置存在宠物粮时,提示宠物主出粮位置存在宠物粮,喂食装置的工作状态正常,当卡粮检测机构长时间无法检测到宠物粮时,提示宠物主存在卡粮情况,进而提醒宠物主卡粮;相较于传统的宠物喂食器无法妥善解决结构中多处卡粮和粮仓监控的问题,本实用新型实施例提供的宠物智能喂食装置通过双检测体系将载粮型腔和出粮位置的宠物粮状况进行检测,实现余粮实时监测以及卡粮实时反馈效果,有效地提高宠物喂食装置的智能化,提高宠物喂食装置的实用性。
技术特征:
1.一种宠物智能喂食装置,其特征在于,包括:
2.根据权利要求1所述的宠物智能喂食装置,其特征在于:所述余粮检测机构包括第一传感器和提醒模块,所述第一传感器设置在所述载粮型腔内且位于出粮位置的一侧,所述提醒模块与所述第一传感器信号连接且用于提醒宠物主余粮情况。
3.根据权利要求2所述的宠物智能喂食装置,其特征在于:所述第一传感器为红外传感器或光栅传感器,所述载粮型腔内的宠物粮受重力能够移动至所述第一传感器的感应路径上。
4.根据权利要求2所述的宠物智能喂食装置,其特征在于:所述提醒模块包括指示灯和控制中心,所述控制中心与所述第一传感器信号连接,所述指示灯与所述控制中心电连接,所述控制中心根据所述第一传感器的信号反馈驱动所述指示灯开启或关闭。
5.根据权利要求1~4任意一项所述的宠物智能喂食装置,其特征在于:所述卡粮检测机构包括第二传感器和指示模块,所述载粮型腔设置有出粮口,所述第二传感器设置在所述出粮口的内壁上,所述指示模块与所述第二传感器信号连接,所述第二传感器的感应路径经过所述出粮口。
6.根据权利要求1~4任意一项所述的宠物智能喂食装置,其特征在于:所述载粮机构包括:
7.根据权利要求6所述的宠物智能喂食装置,其特征在于:所述载粮仓包括:
8.根据权利要求7所述的宠物智能喂食装置,其特征在于:所述出粮组件包括:
9.根据权利要求8所述的宠物智能喂食装置,其特征在于:所述驱动源包括驱动电机和控制模块,所述驱动电机设置在所述安装座上,所述驱动电机与所述旋转座驱动连接,所述控制模块与所述驱动电机电性连接且控制所述驱动电机的输出主轴往预设方向旋转。
10.根据权利要求9所述的宠物智能喂食装置,其特征在于:所述控制模块包括控制电路板和旋转角度传感器,所述控制电路板设置在所述安装座内,所述旋转角度传感器设置在所述驱动电机的输出主轴上,所述控制电路板与所述驱动电机电性驱动连接,所述旋转角度传感器与所述控制电路板信号连接。
技术总结
本技术属于宠物用具技术领域,尤其涉及一种宠物智能喂食装置,包括载粮机构和余粮检测机构,所述载粮机构设置有用于装载宠物粮的载粮型腔;所述余粮检测机构设置在所述载粮型腔内且用于监控所述载粮型腔内的宠物粮存量;其中,所述载粮型腔的出粮位置设置有用于检测是否堵粮的卡粮检测机构。通过双检测体系将载粮型腔和出粮位置的宠物粮状况进行检测,实现余粮实时监测以及卡粮实时反馈效果,有效地提高宠物喂食装置的智能化,提高宠物喂食装置的实用性。
技术研发人员:肖江林
受保护的技术使用者:广东林晟智能科技有限公司
技术研发日:20230426
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!