一种四面通透式羊肚菌采摘机器人平台
本技术属于羊肚菌采摘,具体涉及一种四面通透式羊肚菌采摘机器人平台。
背景技术:
1、羊肚菌是羊肚菌科,羊肚菌属真菌,菌盖近球形,卵形至椭圆形,高可达十厘米,顶端钝圆,表面有似羊肚状的凹坑,目前人工培养的羊肚菌一般会通过机器人对羊肚菌继进行采摘。
2、现有的部分羊肚菌采摘机器人安装完成后,位置相对较为固定,在经过长期使用后,受机械臂频繁移动所带来的冲击力的影响,采摘机器人与平台的连接处极易产生偏移,造成采摘部分的机械爪位置产生误差,从而影响抓取时的精确度,较为不易。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种四面通透式羊肚菌采摘机器人平台,以解决上述背景技术中提出的现有的部分羊肚菌采摘机器人安装完成后,位置相对较为固定,在经过长期使用后,受机械臂频繁移动所带来的冲击力的影响,采摘机器人与平台的连接处极易产生偏移,造成采摘部分的机械爪位置产生误差,从而影响抓取时的精确度,较为不易的问题。
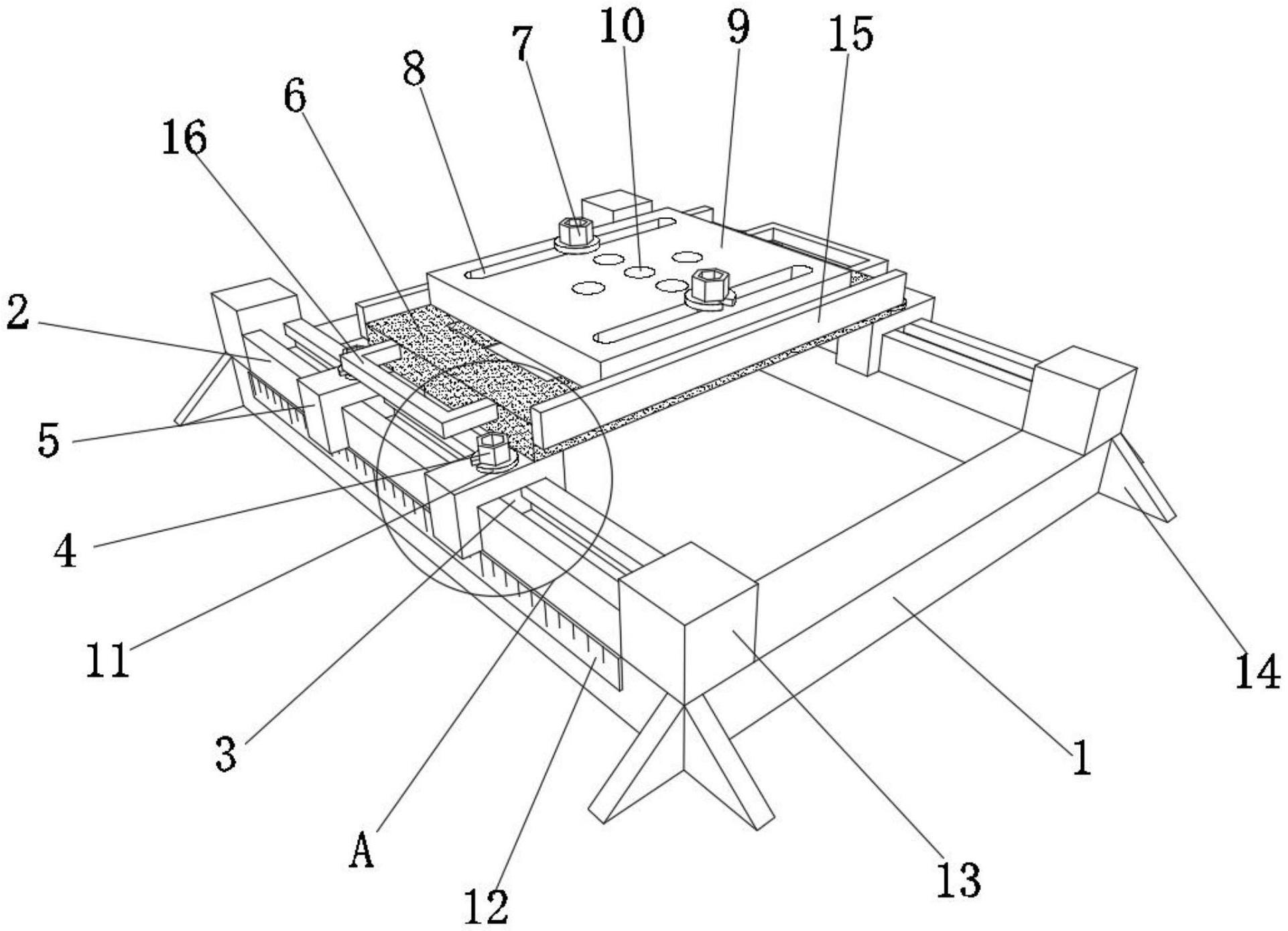
2、为实现上述目的,本实用新型提供如下技术方案:一种四面通透式羊肚菌采摘机器人平台,包括底框,所述底框顶部固定连接有导轨,所述导轨对称设置有两个,所述导轨内侧均滑动连接有滑块,所述滑块对称设置有若干个,所述滑块顶部均螺纹连接有第一螺杆,所述第一螺杆外侧均活动连接有移块,所述移块内侧均滑动连接有导轨,所述移块一侧均固定连接有顶框,所述顶框顶端的内侧螺纹连接有第二螺杆,所述第二螺杆外侧均通过限位孔活动连接有搭载板,所述搭载板内侧对称设置有若干连接螺孔。
3、优选的,所述第一螺杆和第二螺杆外侧均活动连接有垫片,所述第一螺杆底端的外侧均螺纹连接有滑块,所述第二螺杆底端的外侧均螺纹连接有顶框。
4、优选的,所述导轨一侧均固定连接有限位块,所述限位块对称设置有若干个,所述限位块底部均固定连接有底框。
5、优选的,所述限位孔为u形结构,所述限位孔内侧均活动连接有第二螺杆,所述第二螺杆底端的外侧均螺纹连接有顶框。
6、优选的,所述顶框一侧固定连接有限向条,所述限向条对称设置有两个。
7、优选的,所述底框一侧固定连接有脚架,所述脚架对称设置有若干个。
8、优选的,所述顶框一侧固定连接有提手,所述提手对称设置有两个,所述顶框底部固定连接有移块,所述移块内侧均活动连接有第一螺杆,所述第一螺杆底端的外侧均螺纹连接有滑块。
9、优选的,所述底框一侧固定连接有标尺。
10、与现有技术相比,本实用新型提供了一种四面通透式羊肚菌采摘机器人平台,具备以下有益效果:
11、1、本实用新型通过设置导轨,导轨底部均固定连接有底框,导轨内侧均滑动连接有滑块,滑块顶端的内侧均螺纹连接有第一螺杆,第一螺杆外侧均活动连接有移块,移块一侧均固定连接有顶框,顶框顶部的内侧螺纹连接有第二螺杆,第二螺杆外侧均通过限位孔活动连接有搭载板,搭载板内侧对称设置有若干连接螺孔,将羊肚菌采摘机器人通过连接螺孔加装在搭载板的顶部,采摘机器人经过长时间使用产生位置上的偏移后,逆时针旋转第一螺杆进行放松后,滑动滑块将移块和顶框在水平的两个方向上调节羊肚菌采摘机器人的位置,顺时针旋转第一螺杆对位置进行固定,逆时针旋转第二螺杆进行放松后,配合u形的限位孔调节搭载板顶部的羊肚菌机器人在水平的另两个方向上记性二次调节,从而从四面通透的方向上重新校准羊肚菌采摘机器人的位置,能够较为有效的矫正羊肚菌采摘机器人经长时间使用后,所产生的位置偏移,有效保障了抓取采摘羊肚菌过程中的准确性;
12、2、本实用新型通过设置垫片,垫片内侧分别活动连接有第一螺杆和第二螺杆,能够有效降低第一螺杆和第二螺杆长时间使用过程中所产生的松动幅度,提升使用时的稳定性;
13、3、本实用新型通过设置限位块,限位块底部均固定连接有底框,限位块一侧均固定连接有导轨,能够有效限制滑块的滑动幅度,有效降低过度滑动导致脱落的风险。
14、该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现,本实用新型结构科学合理,使用安全方便,为人们提供了很大的帮助。
技术特征:
1.一种四面通透式羊肚菌采摘机器人平台,包括底框(1),其特征在于:所述底框(1)顶部固定连接有导轨(2),所述导轨(2)对称设置有两个,所述导轨(2)内侧均滑动连接有滑块(3),所述滑块(3)对称设置有若干个,所述滑块(3)顶部均螺纹连接有第一螺杆(4),所述第一螺杆(4)外侧均活动连接有移块(5),所述移块(5)内侧均滑动连接有导轨(2),所述移块(5)一侧均固定连接有顶框(6),所述顶框(6)顶端的内侧螺纹连接有第二螺杆(7),所述第二螺杆(7)外侧均通过限位孔(8)活动连接有搭载板(9),所述搭载板(9)内侧对称设置有若干连接螺孔(10)。
2.根据权利要求1所述的一种四面通透式羊肚菌采摘机器人平台,其特征在于:所述第一螺杆(4)和第二螺杆(7)外侧均活动连接有垫片(11),所述第一螺杆(4)底端的外侧均螺纹连接有滑块(3),所述第二螺杆(7)底端的外侧均螺纹连接有顶框(6)。
3.根据权利要求1所述的一种四面通透式羊肚菌采摘机器人平台,其特征在于:所述导轨(2)一侧均固定连接有限位块(13),所述限位块(13)对称设置有若干个,所述限位块(13)底部均固定连接有底框(1)。
4.根据权利要求1所述的一种四面通透式羊肚菌采摘机器人平台,其特征在于:所述限位孔(8)为u形结构,所述限位孔(8)内侧均活动连接有第二螺杆(7),所述第二螺杆(7)底端的外侧均螺纹连接有顶框(6)。
5.根据权利要求1所述的一种四面通透式羊肚菌采摘机器人平台,其特征在于:所述顶框(6)一侧固定连接有限向条(15),所述限向条(15)对称设置有两个。
6.根据权利要求1所述的一种四面通透式羊肚菌采摘机器人平台,其特征在于:所述底框(1)一侧固定连接有脚架(14),所述脚架(14)对称设置有若干个。
7.根据权利要求1所述的一种四面通透式羊肚菌采摘机器人平台,其特征在于:所述顶框(6)一侧固定连接有提手(16),所述提手(16)对称设置有两个,所述顶框(6)底部固定连接有移块(5),所述移块(5)内侧均活动连接有第一螺杆(4),所述第一螺杆(4)底端的外侧均螺纹连接有滑块(3)。
8.根据权利要求1所述的一种四面通透式羊肚菌采摘机器人平台,其特征在于:所述底框(1)一侧固定连接有标尺(12)。
技术总结
本技术公开了一种四面通透式羊肚菌采摘机器人平台,包括底框,所述底框顶部固定连接有导轨,所述导轨对称设置有两个,所述导轨内侧均滑动连接有滑块,所述滑块对称设置有若干个,所述滑块顶部均螺纹连接有第一螺杆,所述第一螺杆外侧均活动连接有移块,所述移块内侧均滑动连接有导轨,顺时针旋转第一螺杆对位置进行固定,逆时针旋转第二螺杆进行放松后,配合U形的限位孔调节搭载板顶部的羊肚菌机器人在水平的另两个方向上记性二次调节,从而从四面通透的方向上重新校准羊肚菌采摘机器人的位置,能够较为有效的矫正羊肚菌采摘机器人经长时间使用后,所产生的位置偏移,有效保障了抓取采摘羊肚菌过程中的准确性。
技术研发人员:廖剑,谢焰锋,吕程辉,庞雄斌,高星星,卢泽民,王锐,谢敬波,罗欣,陈鸿
受保护的技术使用者:武汉市农业科学院
技术研发日:20230524
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!