自移动割草设备的制作方法
本公开涉及自移动割草设备领域,更准确地说,本公开涉及一种自移动割草设备。
背景技术:
1、自移动割草机作为新兴的割草设备,通常用于家庭、公园、园林、小区、高尔夫球场的草地修剪维护。由于自移动割草机能够自动行走、自动割草、无需人工操作,能够减轻人力,提高工作效率,并能保持割草高度与质量的稳定,深受客户的好评。
2、传统割草机器人在设置割草高度时,通常需要人工手动调节刀头的离地高度,从而设置割草高度,没有完全摆脱人工参与,无法满足机器智能化的要求。
技术实现思路
1、本公开为了解决现有技术中存在的问题,提供了一种自移动割草设备。
2、根据本公开的第一方面,提供了一种自移动割草设备,包括:
3、机架,所述机架被配置为用于放置于工作面上;
4、切割机构,所述切割机构被构造为通过托架铰接在所述机架上,且被配置为相对所述机架朝靠近或远离所述工作面的方向移动;
5、举升机构,所述举升机构包括通过转轴铰接在机架一侧的举升部,所述举升部被构造为与所述托架配接;所述举升机构还包括与所述转轴连接的扇形齿轮,以及与所述扇形齿轮啮合的蜗杆,所述扇形齿轮被构造为在蜗杆的作用下带动所述转轴转动,以通过托架使所述切割机构沿上下方向移动;
6、角度检测单元,所述角度检测单元被配置为检测所述扇形齿轮的转动角度;
7、控制单元,所述控制单元被配置为根据角度检测单元的检测角度控制蜗杆带动扇形齿轮转动,以通过所述托架带动所述切割机构运动至目标切割高度。
8、在本公开的一个实施例中,所述角度检测单元包括与扇形齿轮转动轴线同轴布置的第一磁性件,以及所述第一磁性件相对设置的编码器,所述编码器被配置为基于所述第一磁性件转动所产生的磁场变化获取所述扇形齿轮的转动角度。
9、在本公开的一个实施例中,所述角度检测单元包括角度传感器,以及设置在扇形齿轮上偏离其转动轴线位置的第二磁性件,所述角度传感器被配置为基于所述第二磁性件随所述扇形齿轮的转动所产生的磁场强度变化获得所述扇形齿轮的转动角度。
10、在本公开的一个实施例中,所述角度传感器设置有两个,且两个所述角度传感器被构造为位于所述扇形齿轮转动方向上的两侧。
11、在本公开的一个实施例中,所述角度传感器为霍尔传感器。
12、在本公开的一个实施例中,所述自移动割草设备还包括检测组件,所述检测组件设置于所述扇形齿轮的转动极限位,且被配置为在所述扇形齿轮到达所述转动极限位时触发;
13、所述控制单元还被配置为在接收到所述检测组件发送的触发信号的情况下,控制所述扇形齿轮停止转动。
14、在本公开的一个实施例中,所述托架包括第一连杆和第二连杆,所述第一连杆与第二连杆、机架、切割机构围成了呈平行四边形的运动机构;所述举升部包括连接在所述转轴上的连接部,以及由连接部向所述托架底部方向延伸的延伸部;所述延伸部的两侧上设置有配接部;所述配接部被构造为延伸至与各自第二连杆的位置对应,且分别与对应第二连杆的底部配接。
15、在本公开的一个实施例中,所述举升机构包括安装盒、驱动装置;所述驱动装置、蜗杆、扇形齿轮设置在安装盒内;所述安装盒固定在机架上邻近所述托架其中一侧的位置。
16、在本公开的一个实施例中,所述切割机构包括安装支架,以及设置在所述安装支架相对两侧的两个切割单元,两个切割单元分别记为第一切割单元、第二切割单元,在自移动割草设备的行进方向上,第一切割单元相对位于第二切割单元的前方;所述安装盒被配置为沿着托架的方向延伸至邻近所述第一切割单元的位置,所述第一切割单元、安装盒在自移动设备行进方向上的正投影至少部分重叠。
17、在本公开的一个实施例中,所述驱动装置、蜗杆以横置的方式布置在所述安装盒中,所述扇形齿轮的一端被构造为安装在所述转轴上,另一端被构造为向上延伸至与横置的蜗杆螺纹连接。
18、在本公开的自移动割草设备调节切割机构高度的过程中,控制单元能够控制单元被配置为基于包括目标切割高度的高度调整指令,根据角度检测单元获得扇形齿轮的当前位置的角度,获取扇形齿轮的预定转动角度,然后用驱动装置驱动蜗杆转动带动扇形齿轮转动,进而带动转轴和转轴上的举升部转动,由于举升部与托架配合接触,在举升部转动过程中通过托架带动切割机构沿上下方向移动,控制单元根据角度检测单元检测角度控制蜗杆带动扇形齿轮转动,以通过托架带动切割机构运动至目标切割高度。
19、可以看出,本公开的自移动割草设备能够根据用户需要调节切割机构的高度,有效提高了用户的使用体验。另外,由于本公开的举升部与托架配合接触,这使得托架可以浮动在举升部上,当遇到阻力时,托架可以从举升部上抬起,从而可以根据切割机构自适应调整高度,从而提高了自移动割草设备的通过性。
20、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
技术特征:
1.一种自移动割草设备,其特征在于,包括:
2.根据权利要求1所述的自移动割草设备,其特征在于,所述角度检测单元(9)包括与扇形齿轮(62)转动轴线同轴布置的第一磁性件(621),以及所述第一磁性件(621)相对设置的编码器(91),所述编码器(91)被配置为基于所述第一磁性件(621)转动所产生的磁场变化获取所述扇形齿轮(62)的转动角度。
3.根据权利要求1所述的自移动割草设备,其特征在于,所述角度检测单元(9)包括角度传感器(92),以及设置在扇形齿轮(62)上偏离其转动轴线位置的第二磁性件(622),所述角度传感器(92)被配置为基于所述第二磁性件(622)随所述扇形齿轮(62)的转动所产生的磁场强度变化获得所述扇形齿轮(62)的转动角度。
4.根据权利要求3所述的自移动割草设备,其特征在于,所述角度传感器(92)设置有两个,且两个所述角度传感器(92)被构造为位于所述扇形齿轮(62)转动方向上的两侧。
5.根据权利要求3所述的自移动割草设备,其特征在于,所述角度传感器(92)为霍尔传感器。
6.根据权利要求1所述的自移动割草设备,其特征在于,所述自移动割草设备还包括检测组件,所述检测组件设置于所述扇形齿轮(62)的转动极限位,且被配置为在所述扇形齿轮(62)到达所述转动极限位时触发;
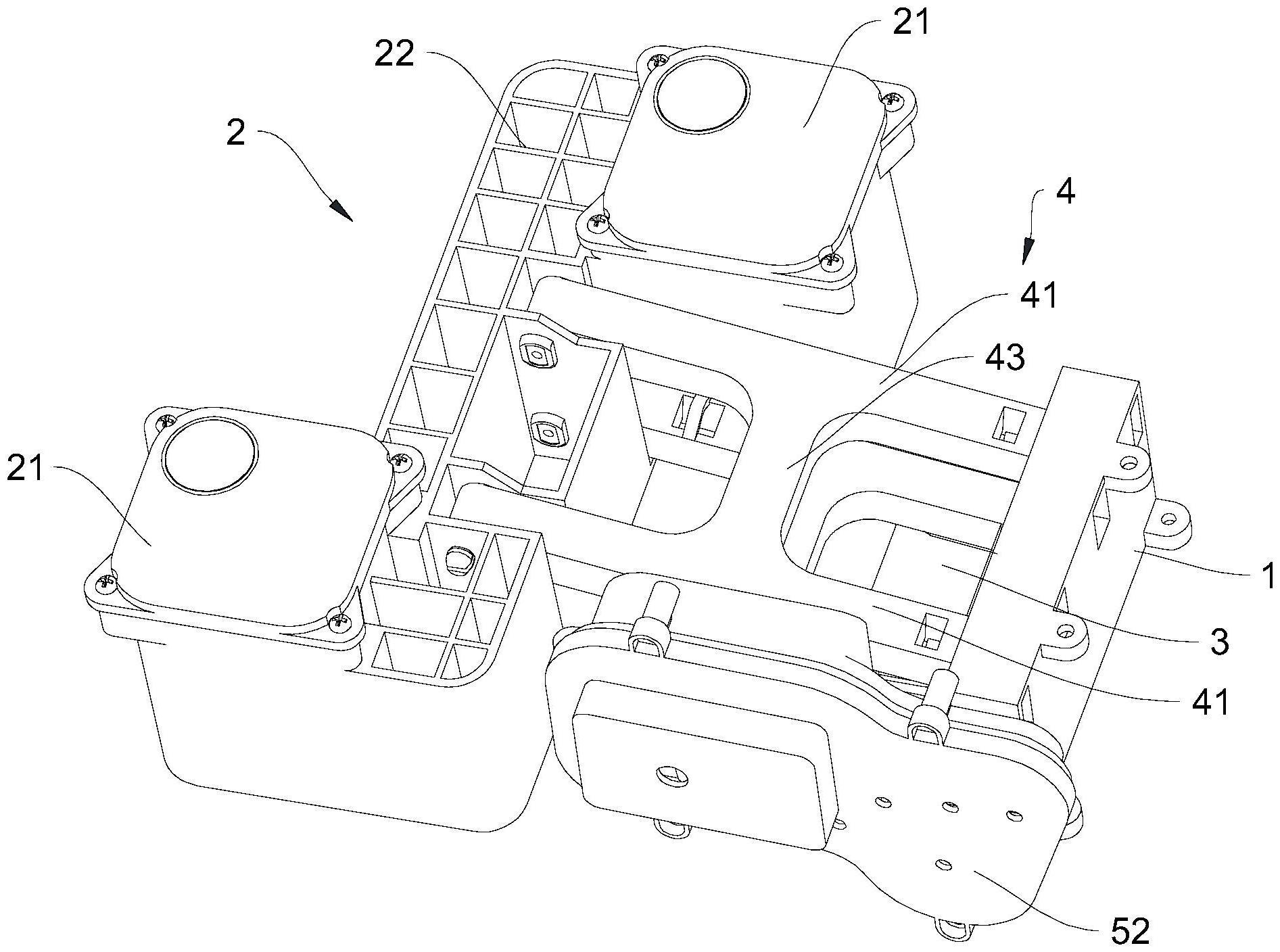
7.根据权利要求1所述的自移动割草设备,其特征在于,所述托架(4)包括第一连杆(41)和第二连杆(42),所述第一连杆(41)与第二连杆(42)、机架(1)、切割机构(2)围成了呈平行四边形的运动机构;所述举升部(3)包括连接在所述转轴(61)上的连接部(31),以及由连接部(31)向所述托架(4)底部方向延伸的延伸部(32);所述延伸部(32)的两侧上设置有配接部(33);所述配接部(33)被构造为延伸至与各自第二连杆(42)的位置对应,且分别与对应第二连杆(42)的底部配接。
8.根据权利要求1所述的自移动割草设备,其特征在于,所述举升机构包括安装盒(52)、驱动装置(51);所述驱动装置(51)、蜗杆(511)、扇形齿轮(62)设置在安装盒(52)内;所述安装盒(52)固定在机架(1)上邻近所述托架(4)其中一侧的位置。
9.根据权利要求8所述的自移动割草设备,其特征在于,所述切割机构(2)包括安装支架(22),以及设置在所述安装支架(22)相对两侧的两个切割单元(21),两个切割单元(21)分别记为第一切割单元(21)、第二切割单元(21),在自移动割草设备的行进方向上,第一切割单元(21)相对位于第二切割单元(21)的前方;所述安装盒(52)被配置为沿着托架(4)的方向延伸至邻近所述第一切割单元(21)的位置,所述第一切割单元(21)、安装盒(52)在自移动设备行进方向上的正投影至少部分重叠。
10.根据权利要求9所述的自移动割草设备,其特征在于,所述驱动装置(51)、蜗杆(511)以横置的方式布置在所述安装盒(52)中,所述扇形齿轮(62)的一端被构造为安装在所述转轴(61)上,另一端被构造为向上延伸至与横置的蜗杆(511)螺纹连接。
技术总结
本公开涉及一种自移动割草设备,该自移动割草设备包括机架、切割机构、举升机构、角度检测单元和控制单元。机架被配置为用于放置于工作面上;切割机构被构造为通过托架铰接在机架上;举升机构包括通过转轴铰接在机架一侧的举升部,举升部被构造为与托架配接;举升机构还包括与转轴连接的扇形齿轮,以及与扇形齿轮啮合的蜗杆,扇形齿轮被构造为在蜗杆的作用下带动转轴转动,以通过托架使切割机构沿上下方向移动;控制单元被配置为根据角度检测单元的检测角度控制蜗杆带动扇形齿轮转动,以通过托架带动切割机构运动至目标切割高度。
技术研发人员:李宏涛,蒲志高,吴永东
受保护的技术使用者:科沃斯机器人股份有限公司
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!