双臂协同水果采摘机器人
本技术涉及农业机械,具体提供一种双臂协同水果采摘机器人。
背景技术:
1、目前,随着农业自动化进程的加速,水果采摘机器人逐渐普及,针对不同水果的水果采摘机器人应运而生。但现存的水果采摘机器人普遍为单机械臂采摘,存在效率过低的问题,而且在果蔬装运环节过于繁琐,导致应用领域狭窄,市场竞争力弱。
2、因此,亟需一种自动化程度高、采摘效率高的水果采摘机器人。
技术实现思路
1、本实用新型为解决上述问题,提供了一种双臂协同水果采摘机器人,有效提高了采摘效率。
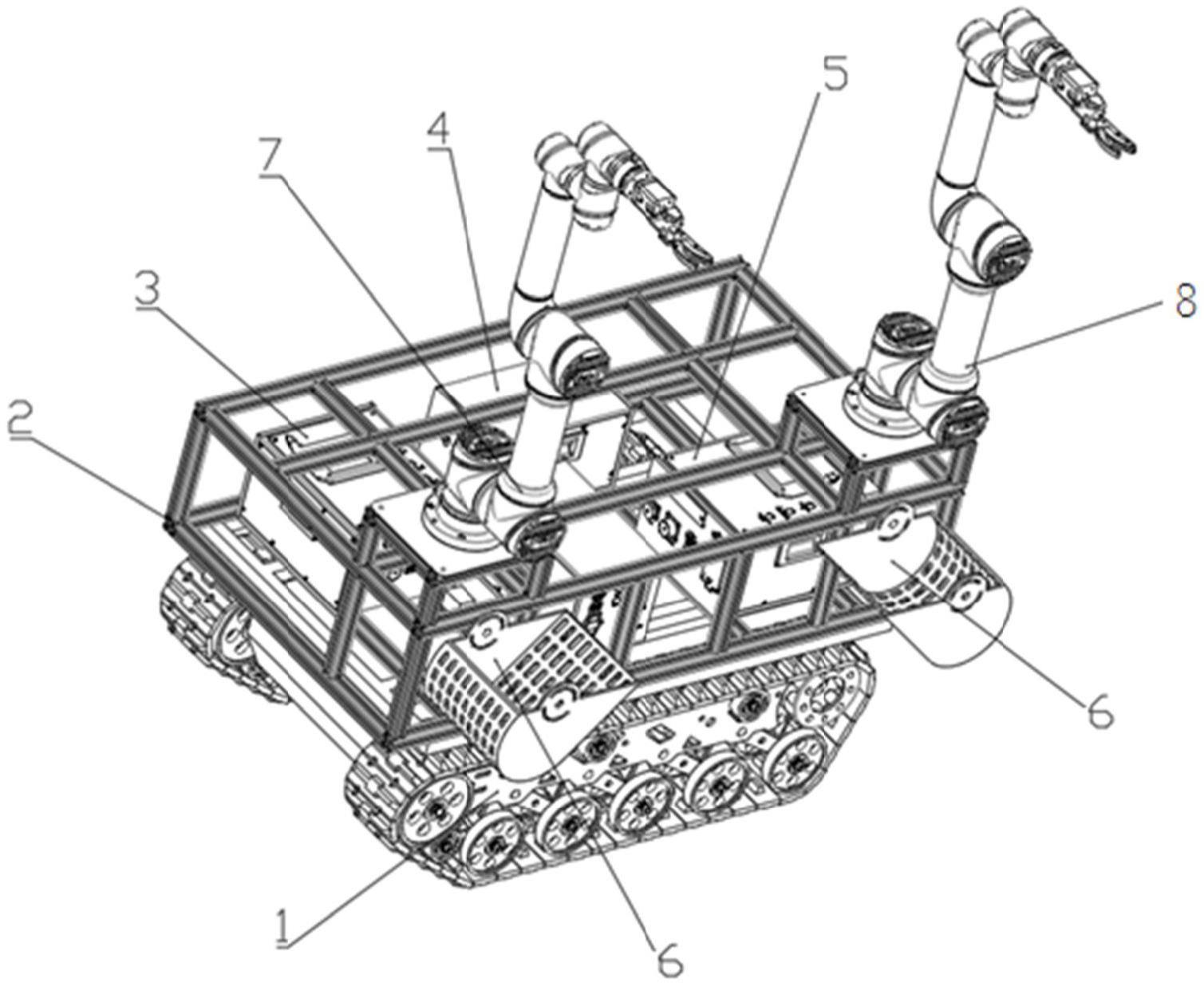
2、本实用新型提供的双臂协同水果采摘机器人,包括:移动底盘、机架、第一采摘机械手和第二采摘机械手;
3、移动底盘包括箱体和设置在箱体两侧的履带式行走结构,履带式行走结构包括支重轮、引导轮、行走梁和履带,多个支重轮等距设置,并连接在行走梁的下端;引导轮设置在行走梁的前端和/或后端,引导轮的设置高度高于支重轮的设置高度;履带为封闭环状,其啮合在支重轮和引导轮的外侧;
4、机架连接在箱体的上方,机架的侧面还设置有装运装置,装运装置用于存放第一采摘机械手和第二采摘机械手采摘获得的果实;
5、第一采摘机械手和第二采摘机械手均安装在机架上方,均包括机械臂、末端执行器和图像采集模块,末端执行器安装在机械臂的顶部末端,用于采摘果实;图像采集模块设置在机械臂的顶部,用于获取采摘图像信息。
6、优选的,箱体用于连接两侧的履带式行走结构,在箱体内还设置有用于驱动履带式行走结构的动力装置;机架的内部空间设置有电源、导航系统和控制器,电源为导航系统和控制器供电,导航系统用于规划和控制移动底盘的行走,控制器用于控制第一采摘机械手和第二采摘机械手的运动;。
7、优选的,履带式行走结构还包括托链轮和缓冲装置,托链轮连接在行走梁的上端,托链轮与履带接触,用于支撑履带;支重轮连接在缓冲装置的下端,缓冲装置的上端与行走梁连接。
8、优选的,装运装置通过配做的滑块和滑道连接在机架上。
9、优选的,滑块上还设置有锁紧装置,用于阻止滑块在滑道上运动,将装运装置分别固定在第一采摘机械手和第二采摘机械手的正下方。
10、优选的,装运装置包括集果篮、电机和传动件组成,集果篮位于采摘机械臂的下方,连接在机架上;传动件由连接件、连接轴和联轴器组成,连接件连接在转运篮与连接轴之间,连接轴通过联轴器与电机连接,电机用于带动集果篮旋转。
11、优选的,集果篮为2个,集果篮由一个圆弧镂空板、一个与该圆弧相切的平面镂空板、以及连接在圆弧镂空板和平面镂空板两侧的挡板组成。
12、优选的,架体由多个水平支杆和竖直支杆通过型钢连接件固定而成。
13、与现有技术相比,本实用新型能够取得如下有益效果:
14、本实用新型通过导航系统和控制器实现了机器人自动导航和采摘机械手的控制,并通过两个采摘机械手提高了采摘效率,当采摘机械手安装不同的末端执行器,可实现不同的采摘、修剪等多种功能;并且装运和卸载水果十分方便。
技术特征:
1.一种双臂协同水果采摘机器人,其特征在于,包括:移动底盘、机架、第一采摘机械手和第二采摘机械手;
2.如权利要求1所述的双臂协同水果采摘机器人,其特征在于,履带式行走结构还包括托链轮和缓冲装置,托链轮连接在行走梁的上端,托链轮与履带接触,用于支撑履带;支重轮连接在缓冲装置的下端,缓冲装置的上端与行走梁连接。
3.如权利要求1所述的双臂协同水果采摘机器人,其特征在于,装运装置通过配做的滑块和滑道连接在机架上。
4.如权利要求3所述的双臂协同水果采摘机器人,其特征在于,滑块上还设置有锁紧装置,用于阻止滑块在滑道上运动,将装运装置分别固定在第一采摘机械手和第二采摘机械手的正下方。
5.如权利要求3所述的双臂协同水果采摘机器人,其特征在于,装运装置包括集果篮、电机和传动件组成,集果篮位于采摘机械臂的下方,连接在机架上;传动件由连接件、连接轴和联轴器组成,连接件连接在转运篮与连接轴之间,连接轴通过联轴器与电机连接,电机用于带动集果篮旋转。
6.如权利要求5所述的双臂协同水果采摘机器人,其特征在于,集果篮为2个,集果篮由一个圆弧镂空板、一个与该圆弧相切的平面镂空板、以及连接在圆弧镂空板和平面镂空板两侧的挡板组成。
7.如权利要求1所述的双臂协同水果采摘机器人,其特征在于,架体由多个水平支杆和竖直支杆通过型钢连接件固定而成。
技术总结
本技术涉及农业机械技术领域,具体提供一种双臂协同水果采摘机器人,包括:移动底盘、机架和两个采摘机械手,移动底盘包括箱体和设置在箱体两侧的履带式行走结构,履带式行走结构用于机器人的行走;机架的内部设置有电源、导航系统和控制器,电源为导航系统和控制器供电,导航系统用于规划和控制移动底盘的行走,控制器用于控制采摘机械手的运动;机架的侧面还设置有用于存放果实的装运装置;采摘机械手安装在机架上方,用于采摘果实。本技术通过导航系统和控制器实现了自动导航和采摘机械手的控制,并通过两个采摘机械手提高了采摘效率,当采摘机械手安装不同的末端执行器,可实现采摘、修剪等多种功能;并且装运和卸载水果十分方便。
技术研发人员:付威,夏雨阳,张斌,占晓宇,黄嘉信,付明扬,邓紫阳,许仁华,黄锦熠
受保护的技术使用者:海南大学
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!