一种农业复式作业机器人的制作方法
本技术涉及无人机机身,具体为一种农业复式作业机器人。
背景技术:
1、在农业生产领域,传统的农业生产多为人工手动劳作,生产效率较为低下,难以实现大规模的种植,但是随着近年来农业种植技术的发展和自动化技术的成熟,农业机械设备被逐渐运用到农业生产当中,机械化的设备能够极大地提高农业种植和管理效率,满足规模化农业发展的需要,从而有利于促进农业的高速发展。
2、目前的在农业种植活动中,种子的种植一般需要经历开沟、播种以及覆土掩盖流程,而上述流程大多是由人工单项依次独立完成,即先开沟,然后播种,最后对播完的种子进行覆土,不方便同时实施上述工作步骤,从而严重影响农业的种植效率的同时,还严重损耗人力劳动成本。
3、针对上述问题,亟需设计一种农业复式作业机器人。
技术实现思路
1、本实用新型的目的在于提供一种农业复式作业机器人,以解决上述背景技术中提出的至少一项技术问题。
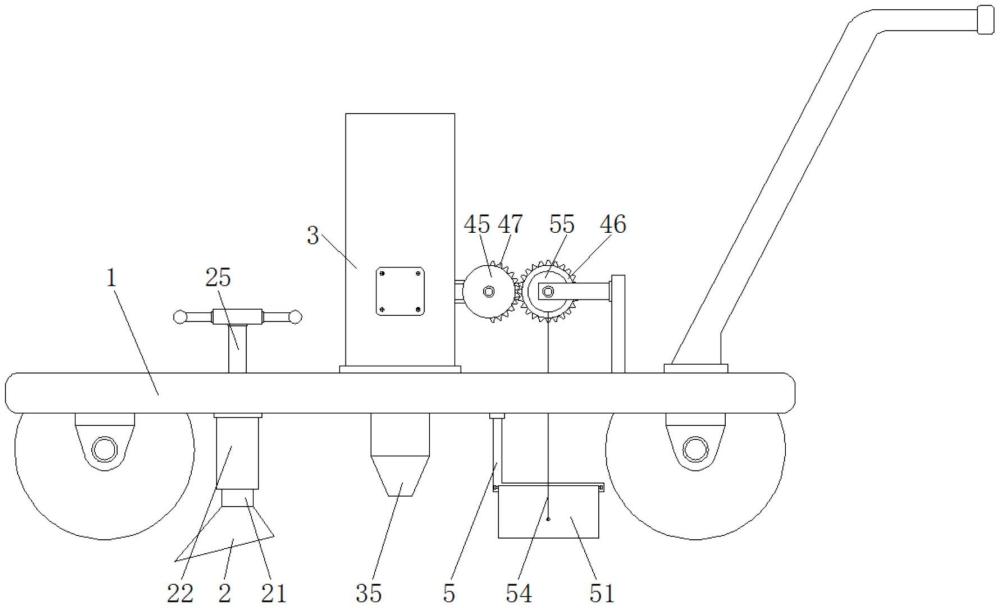
2、为实现上述目的,本实用新型提供如下技术方案:一种农业复式作业机器人,包括:平台,所述平台上分别安装有开沟机构、播种机构以及覆土机构,所述开沟机构包括犁头以及调节杆,所述犁头上安装有延伸杆,所述延伸杆的内部安装有调节杆,所述调节杆转动安装于平台上;
3、所述播种机构包括盒体以及播撒盘,所述盒体安装于平台的表面,所述盒体的内部开设有料仓,所述料仓的底部开设有投料管道,所述投料管道内设置有播撒盘,所述播撒盘上开设有凹槽,所述盒体的下方设置有投料嘴;
4、所述盒体上安装有驱动机构,所述驱动机构包括伺服电机,所述伺服电机的输出端固定有驱动杆,所述驱动杆贯穿播撒盘并与播撒盘固定连接,所述驱动杆远离伺服电机的一端固定有第一传动轮,所述第一传动轮上设置有传动带,所述传动带远离第一传动轮的一端连接有第二传动轮,所述第二传动轮上通过轴体连接有第一驱动盘,所述第一驱动盘的边缘连接有第二驱动盘;
5、所述覆土机构包括安装杆,所述安装杆固定于平台表面,所述安装杆上安装有覆土板,所述覆土板上安装有牵引绳,所述牵引绳远离覆土板的一端连接有收卷轮。
6、优选的,所述延伸杆与调节杆之间为螺纹连接。
7、优选的,所述延伸杆的外侧嵌套有安装套筒,所述安装套筒固定于平台的表面,所述安装套筒的内壁上开设有引导槽,所述延伸杆的表面固定有支杆,所述支杆通过引导槽与安装套筒滑动连接。
8、优选的,所述播撒盘通过驱动杆与盒体转动连接,所述凹槽在播撒盘上等角度分布,所述凹槽的宽度等于投料管道的宽度。
9、优选的,所述第一驱动盘和第二驱动盘的边缘均设置有齿块,所述齿块在第一驱动盘和第二驱动盘的边缘分别呈180°和360°扇形范围分布,所述第一驱动盘通过齿块与第二驱动盘啮合链接。
10、优选的,所述安装杆上安装有横轴,所述覆土板通过横轴与安装杆转动连接。
11、优选的,所述横轴与覆土板之间贯穿连接,所述横轴与覆土板之间设置有涡旋弹簧。
12、优选的,所述收卷轮上固定安装有驱动轴,所述驱动轴与第二驱动盘之间为固定连接。
13、本实用新型的一种农业复式作业机器人,具有如下有益效果:
14、平台通过轮子进行持续行走时,犁头会首先进行开沟工作,伺服电机会通过驱动杆带动播种盘进行旋转,旋转的播种盘会带动凹槽内的种子通过投料嘴投入开出的沟内,完成播种,而当种子在沟内完成播种之后,安装杆上的覆土板在涡旋弹簧的推动下会通过横轴在安装杆上进行旋转,从而覆土板会将沟两侧的土壤推向沟内对完成播种的种子进行覆土掩盖,进而同步完成了开沟、播种以及覆土掩盖的工作,提升了农业种植效率,降低了人工成本。
技术特征:
1.一种农业复式作业机器人,其特征在于,包括:平台(1),所述平台(1)上分别安装有开沟机构、播种机构以及覆土机构,所述开沟机构包括犁头(2)以及调节杆(25),所述犁头(2)上安装有延伸杆(21),所述延伸杆(21)的内部安装有调节杆(25),所述调节杆(25)转动安装于平台(1)上;
2.根据权利要求1所述的一种农业复式作业机器人,其特征在于,所述延伸杆(21)与调节杆(25)之间为螺纹连接。
3.根据权利要求1所述的一种农业复式作业机器人,其特征在于,所述延伸杆(21)的外侧嵌套有安装套筒(22),所述安装套筒(22)固定于平台(1)的表面,所述安装套筒(22)的内壁上开设有引导槽(23),所述延伸杆(21)的表面固定有支杆(24),所述支杆(24)通过引导槽(23)与安装套筒(22)滑动连接。
4.根据权利要求1所述的一种农业复式作业机器人,其特征在于,所述播撒盘(33)通过驱动杆(41)与盒体(3)转动连接,所述凹槽(34)在播撒盘(33)上等角度分布,所述凹槽(34)的宽度等于投料管道(32)的宽度。
5.根据权利要求1所述的一种农业复式作业机器人,其特征在于,所述第一驱动盘(45)和第二驱动盘(46)的边缘均设置有齿块(47),所述齿块(47)在第一驱动盘(45)和第二驱动盘(46)的边缘分别呈180°和360°扇形范围分布,所述第一驱动盘(45)通过齿块(47)与第二驱动盘(46)啮合链接。
6.根据权利要求1所述的一种农业复式作业机器人,其特征在于,所述安装杆(5)上安装有横轴(52),所述覆土板(51)通过横轴(52)与安装杆(5)转动连接。
7.根据权利要求6所述的一种农业复式作业机器人,其特征在于,所述横轴(52)与覆土板(51)之间贯穿连接,所述横轴(52)与覆土板(51)之间设置有涡旋弹簧(53)。
8.根据权利要求1所述的一种农业复式作业机器人,其特征在于,所述收卷轮(55)上固定安装有驱动轴(56),所述驱动轴(56)与第二驱动盘(46)之间为固定连接。
技术总结
本技术公开了一种农业复式作业机器人,包括:平台,所述平台上分别安装有开沟机构、播种机构以及覆土机构,所述开沟机构包括犁头以及调节杆,所述犁头上安装有延伸杆,所述延伸杆的内部安装有调节杆,所述调节杆转动安装于平台上。该农业复式作业机器人,犁头进行开沟工作,伺服电机会通过驱动杆带动播种盘进行旋转,旋转的播种盘会带动凹槽内的种子通过投料嘴投入开出的沟内,而当种子在沟内完成播种之后,安装杆上的覆土板在涡旋弹簧的推动下会通过横轴在安装杆上进行旋转,从而覆土板会将沟两侧的土壤推向沟内对完成播种的种子进行覆土掩盖,进而同步完成了开沟、播种以及覆土掩盖的工作,提升了农业种植效率,降低了人工成本。
技术研发人员:李惟,潘峙均,朱海波,赵毅,胡俊杰,康晓革,朱武威
受保护的技术使用者:陕西华景云智能科技有限公司
技术研发日:20230905
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!