道路绿化带修剪机器人的制作方法
本技术涉及市政道路环卫机械,特别涉及道路绿化带修剪机器人。
背景技术:
1、绿化带是道路的重要组成部分,有着美化城市、消除视觉疲劳、净化环境的作用。
2、一方面,现有的方案有着自动化程度不高,修剪模式不灵活等缺点。此外,现有的方案无法做到全自动驾驶,依然需要司机。如中国专利号201410621569.x公开的公路绿化修剪设备及清扫车,以及中国专利号202210987849.7公开一种车载道路绿化修剪机。
3、另一方面,由于需要司机控制车辆行驶现有的方案不能自动实现定点分段修剪。
技术实现思路
1、本实用新型的目的在于提供一种道路绿化带修剪机器人,市政道路的维护也正逐步向自动化,智能化方向发展。道路绿化带修剪机器人通过车体的自动驾驶底盘、六轴机械臂、弧形绿篱机在作业路段的绿化带上实现自动化修剪,以最大限度地节省人力,实现绿化带修剪的无人化,保证修剪的质量,方便市政道路的维护工作。
2、按此目的设计的一种道路绿化带修剪机器人,包括设置在车体上的六轴机械臂,车体上设有自动驾驶底盘,车体通过自动驾驶底盘在作业路段实现无人驾驶,六轴机械臂一端设有弧形绿篱机,道路绿化带修剪机器人通过车体的自动驾驶底盘、六轴机械臂、弧形绿篱机在作业路段的绿化带上实现自动化修剪。
3、自动驾驶无人车为现有技术,其配合无人驾驶的系统程序软件,这里不再详述,而自动驾驶底盘的详细结构可参见中国专利号202220401848.5公开的一种自动驾驶的线控底盘,以及中国专利号201510807971.1公开的一种四轮驱动四轮转向自动驾驶底盘的电控系统,这里不再详述自动驾驶底盘的具体结构。
4、弧形绿篱机为详细结构可以参见中国专利号201610201500.0、以及中国专利号202020760277.5,这里不再详述。
5、通过改变六轴机械臂的曲轴形态,以调节弧形绿篱机的修剪模式和/或修剪角度位置,得益于六轴机械的曲度可调,以及弧形绿篱机的刀片弧度可调的使用,该道路绿化带修剪机器人拥有水平修剪,垂直修剪,客制化修剪三种模式。三种模式的施工路段也可以自行设置,以搭配出不同的绿化带景观。
6、车体对应六轴机械臂的一侧或两侧设有保护板,保护板可以避免碎枝飞溅到车体上,也可以一定程度上控制碎枝掉落的范围,使其不会散落到道路上。
7、保护板固定设置在车体上,或者,车体上设有铰接座与角度调节座,保护板一端与铰接座铰接,保护板与角度调节座之间设有连杆,连杆一端与保护板连接,连杆另一端与角度调节座活动连接,通过改变连杆在角度调节座的安装位置,以改变保护板在车体上安装状态,以调节碎枝掉落的范围。
8、弧形绿篱机包括弧形支架、刀片,弧形支架一端、刀片一端铰接,弧形支架、刀片之间设有角度调节连接组件,弧形支架、刀片之间通过角度调节连接组件改变弧形支架的弧度,以调节刀片的弧度,可以手动更改弧形绿篱机刀片的弧度,实现一刀多用。刀片为直刀时可用于修剪水平或垂直面,刀片为弯刀状态时,不同曲率(弧度)的弯刀可用于修剪不同直径的弧面。
9、刀片对应修剪绿化带的方向设有若干个间隔设置的尖齿或刀刃。
10、道路绿化带修剪机器人,还包括控制弧形绿篱机电动部分进行启停的继电器,车体包括设有自动驾驶底盘控制中心的车头箱,车头箱上设有工控机与路由器,工控机通过路由器与自动驾驶底盘控制中心的mcu进行通信连接,继电器、六轴机械臂分别通过线束与工控机进行电控连接,以使自动驾驶底盘控制中心通过工控机控制六轴机械臂、弧形绿篱机的工作。工控机通过继电器控制弧形绿篱机的开启和关机,车体带动弧形绿篱机在到达预设的工作开始位置时,绿篱机开启,六轴机械臂操作弧形绿篱机做出预设动作。车体带动弧形绿篱机在到达预设的工作结束位置时,绿篱机关机,六轴机械臂运动至待机位置。六轴机械臂工作范围达到1400mm,高自由度的机械臂可以操作弧形绿篱机如人手一般灵活工作。
11、车体上还设有与自动驾驶底盘配合的gps定位模块,gps定位模块与自动驾驶底盘控制中心的mcu进行通信连接,自动驾驶底盘控制中心通过gps定位模块读取自动驾驶底盘的gps信息,自动驾驶底盘控制中心通过gps定位模块可以设置修剪的起点与终点,以实现分段修剪。用户可以在自动驾驶底盘控制中心中设置在特定位置装置的修剪模式。如在a点开始修剪水平面,b点结束修剪水平面,c点开始修剪垂直面等,每个点修剪完后,可以进行人工根据绿化需要修剪的状态进行调节弧形绿篱机。
12、车体上还设有与自动驾驶底盘配合的高精度传感器与摄像头,高精度传感器用于检测行驶时的障碍物,摄像头用于拍摄并识别障碍物和/或行驶路径。实现清洗车具有l4级别自驾能力。无人驾驶底盘的障碍物监测范围,行驶路径等,均可在自动驾驶底盘控制中心中设定。
13、弧形绿篱机一端设有连接杆,连接杆上设有与六轴机械臂一端配合连接的连接块,弧形绿篱机通过连接杆、连接块拆卸式安装在六轴机械臂上,便于后期维修拆卸保养更换弧形绿篱机。
14、本实用新型具有如下有益效果:
15、通过上述设置的技术方案,道路绿化带修剪机器人可以进行静态修剪和动态修剪。静态修剪即在车辆停止时进行修剪,动态修剪即在车辆缓慢行驶的同时进行修剪。静态修剪适用于某一小范围的非平面修剪,动态修剪适用于长距离的平面修剪。在静态修剪中,车辆在设定的静态修剪位置停车后,六轴机械臂运动到工作位置进行修剪,修剪完成后,六轴机械臂运动回待机位置,车辆重新开始行驶。在动态修剪中,车辆在到达设定的动态修剪起始点后,六轴机械臂运动到工作位置并固定不动,车辆继续缓慢行驶,直至到达设定的动态修剪终止点,六轴机械臂运动回待机位置。
技术特征:
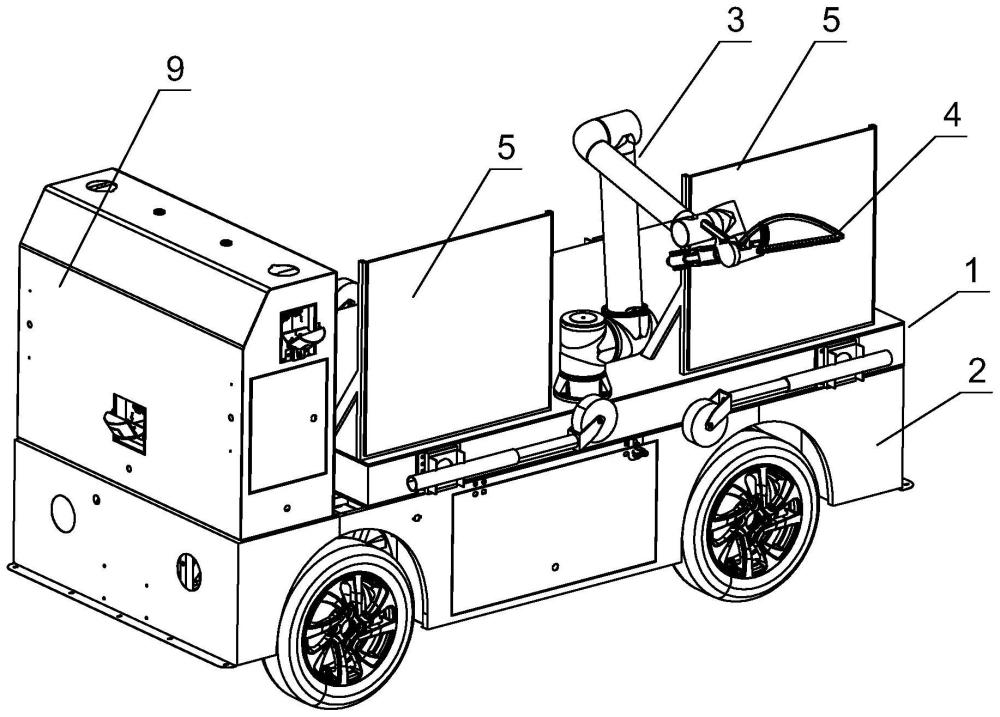
1.一种道路绿化带修剪机器人,包括设置在车体(1)上的六轴机械臂(3),其特征在于:车体(1)上设有自动驾驶底盘(2),车体(1)通过自动驾驶底盘(2)在作业路段实现无人驾驶,六轴机械臂(3)一端设有弧形绿篱机(4),道路绿化带修剪机器人通过车体(1)的自动驾驶底盘(2)、六轴机械臂(3)、弧形绿篱机(4)在作业路段的绿化带上实现自动化修剪。
2.根据权利要求1所述的道路绿化带修剪机器人,其特征在于:通过改变六轴机械臂(3)的曲轴形态,以调节弧形绿篱机(4)的修剪模式和/或修剪角度位置。
3.根据权利要求1所述的道路绿化带修剪机器人,其特征在于:车体(1)对应六轴机械臂(3)的一侧或两侧设有保护板(5)。
4.根据权利要求3所述的道路绿化带修剪机器人,其特征在于:保护板(5)固定设置在车体(1)上,或者,车体(1)上设有铰接座与角度调节座,保护板(5)一端与铰接座铰接,保护板(5)与角度调节座之间设有连杆,连杆一端与保护板(5)连接,连杆另一端与角度调节座活动连接,通过改变连杆在角度调节座的安装位置,以改变保护板(5)在车体(1)上安装状态。
5.根据权利要求1所述的道路绿化带修剪机器人,其特征在于:弧形绿篱机(4)包括弧形支架(6)、刀片(7),弧形支架(6)一端、刀片(7)一端铰接,弧形支架(6)、刀片(7)之间设有角度调节连接组件,弧形支架(6)、刀片(7)之间通过角度调节连接组件改变弧形支架(6)的弧度,以调节刀片(7)的弧度。
6.根据权利要求5所述的道路绿化带修剪机器人,其特征在于:刀片(7)对应修剪绿化带的方向设有若干个间隔设置的尖齿(8)或刀刃。
7.根据权利要求1所述的道路绿化带修剪机器人,其特征在于:还包括控制弧形绿篱机(4)电动部分进行启停的继电器,车体(1)包括设有自动驾驶底盘控制中心的车头箱(9),车头箱(9)上设有工控机与路由器,工控机通过路由器与自动驾驶底盘控制中心的mcu进行通信连接,继电器、六轴机械臂(3)分别通过线束与工控机进行电控连接,以使自动驾驶底盘控制中心通过工控机控制六轴机械臂(3)、弧形绿篱机(4)的工作。
8.根据权利要求7所述的道路绿化带修剪机器人,其特征在于:车体(1)上还设有与自动驾驶底盘(2)配合的gps定位模块,gps定位模块与自动驾驶底盘控制中心的mcu进行通信连接,自动驾驶底盘控制中心通过gps定位模块读取自动驾驶底盘(2)的gps信息,自动驾驶底盘控制中心通过gps定位模块可以设置修剪的起点与终点,以实现分段修剪。
9.根据权利要求1所述的道路绿化带修剪机器人,其特征在于:车体(1)上还设有与自动驾驶底盘(2)配合的高精度传感器与摄像头,高精度传感器用于检测行驶时的障碍物,摄像头用于拍摄并识别障碍物和/或行驶路径。
10.根据权利要求1所述的道路绿化带修剪机器人,其特征在于:弧形绿篱机(4)一端设有连接杆(10),连接杆(10)上设有与六轴机械臂(3)一端配合连接的连接块(11),弧形绿篱机(4)通过连接杆(10)、连接块(11)拆卸式安装在六轴机械臂(3)上。
技术总结
本技术涉及一种道路绿化带修剪机器人,包括设置在车体上的六轴机械臂,车体上设有自动驾驶底盘,车体通过自动驾驶底盘在作业路段实现无人驾驶,六轴机械臂一端设有弧形绿篱机,道路绿化带修剪机器人通过车体的自动驾驶底盘、六轴机械臂、弧形绿篱机在作业路段的绿化带上实现自动化修剪。市政道路的维护也正逐步向自动化,智能化方向发展。道路绿化带修剪机器人通过车体的自动驾驶底盘、六轴机械臂、弧形绿篱机在作业路段的绿化带上实现自动化修剪,以最大限度地节省人力,实现绿化带修剪的无人化,保证修剪的质量,方便市政道路的维护工作。
技术研发人员:麦骞誉
受保护的技术使用者:路邦数码有限公司
技术研发日:20231103
技术公布日:2024/8/26
- 还没有人留言评论。精彩留言会获得点赞!