宠物训练排便机器人
本技术涉及机器人,具体是宠物训练排便机器人。
背景技术:
1、经检索,公告号为cn208129193u中国实用新型公开了宠物陪伴及训练机器人,它包括机器人本体,所述机器人本体包括机身、安装于所述机身底部并用于驱动所述机器人移动的驱动装置;所述机身的顶部设有体感识别器,所述体感识别器的下方依次设有玩具球发射口和摄像头,所述摄像头的下方设有显示屏,所述显示屏的一侧设有wifi天线,所述显示屏的另一侧设有电击器天线,所述显示屏的下方中间位置设有物品存放区,所述物品存放区的下方依次设有扬声器和零食奖励发放口;所述体感识别器、摄像头、显示屏和扬声器均与机身内部的控制模块电性连接;运用体感识别器识别宠物状态,驱动相应机构动作以达到对宠物训练和陪伴目的,具有纠正宠物的坏习惯,陪宠物玩耍,解决宠物主人烦恼等优点。
2、上述装置采用食物奖励训练法来训练宠物,即通过宠物能够准确完成指令后,机器人通过发放零食,进行奖励,从而使宠物能够正确理解指令,但是整体机器人的零食用完后,则无法正常执行训练宠物的指令。
技术实现思路
1、本实用新型的目的在于提供宠物训练排便机器人,以解决上述背景技术中提出的问题。
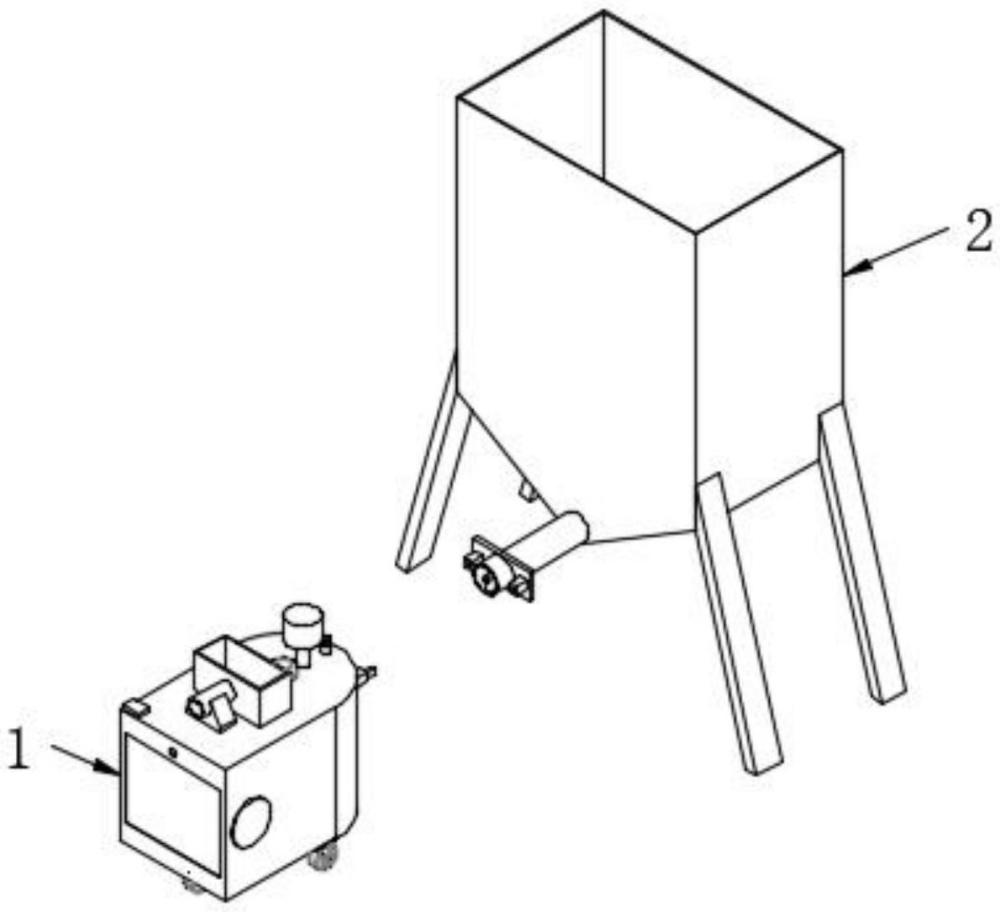
2、本实用新型的技术方案是:宠物训练排便机器人,包括:
3、单独设立的出料箱,所述出料箱的外侧壁设置有支撑结构;
4、中心轴横向设置的出料筒,所述出料箱的底部与出料筒相固定且相连通;
5、第二伺服电机,所述第二伺服电机固定在出料筒上;
6、有轴绞龙杆,所述出料筒的一端开设有转动孔,所述有轴绞龙杆的一端转动安装在转动孔内,且所述第二伺服电机的输出端与有轴绞龙杆同轴固定;
7、铜制插孔,两个所述铜制插孔的整体均固定在出料筒另一端的外侧上,所述第二伺服电机的正负极接口分别通过电线与两个铜制插孔相连接;
8、单独设立的训练机器人,所述训练机器人包括外壳,所述训练机器人的底部设置有用于移动的移动组件,所述训练机器人的内部安装有控制模块、信号传递模块、蓄电池、下料组件,所述训练机器人的外侧安装有扬声器、麦克风、显示器、体感传感器、玩具发射器以及摄像头,所述训练机器人的外侧开设有位于下料组件上方的插口,所述插口的周围设置有两个与铜制插孔相适配的电极插片,所述蓄电池的正负极分别通过电线与两个电极插片相连接,所述信号传递模块、蓄电池、下料组件、扬声器、麦克风、显示器、体感传感器、玩具发射器以及摄像头均与控制模块建立电性连接。
9、优选地,所述支撑结构包括四个侧支撑杆,所述侧支撑杆的一端固定在出料箱的外侧。
10、优选地,所述外壳的顶部安装有天线,所述天线与信号传递模块通过信号线建立电性连接。
11、优选地,所述移动组件包括:
12、舵轮,所述舵轮安装在外壳的底部,所述舵轮与控制模块建立电性连接;
13、多个万向轮,所述万向轮的整体固定在外壳的底部。
14、优选地,所述下料组件包括;
15、用于称重的称重组件;
16、第一伺服电机,所述第一伺服电机的整体固定在外壳的顶部;
17、储料筒,所述储料筒的一端固定在外壳内的底部,所述储料筒的另一端位于插口下方,且称重组件安装在储料筒的内部;
18、传动杆,所述传动杆的一端与第一伺服电机的输出轴同轴固定,所述传动杆的另一端位于称重组件下方且固定有多个绕其中心轴呈环形分布的隔板,每相邻两个所述隔板形成一个扇形隔间,所述外壳的底部开设有与其扇形隔间轮廓一致的下料口。
19、优选地,所述称重组件包括:
20、支撑壳,所述支撑壳的整体固定在储料筒的内,所述支撑壳的一侧开设有与扇形隔间轮廓一致的缺口;
21、称重板,所述称重板的整体滑动设置在支撑壳的顶部;
22、多个双节伸缩筒,所述双节伸缩筒的两端分别与称重板的底部和支撑壳内的底部相固定;
23、称重传感器,所述称重传感器的整体安装在支撑壳内的底部,所述称重传感器的检测端与称重板相接触,所述称重传感器与控制模块建立电性连接。
24、本实用新型通过改进在此提供宠物训练排便机器人,与现有技术相比,具有如下改进及优点:
25、将零食倒入出料箱的内部,在零食用完后,训练机器人通过移动组件进行移动,使出料筒插入训练机器人的插口内,当训练机器人上的两个电极插片与出料筒上的两个铜制插孔相互插接时,此时蓄电池的电流通过两个铜制插孔对第二伺服电机进行输电,第二伺服电机启动,第二伺服电机通过输出轴带动有轴绞龙杆进行轴向转动,将出料箱的零食送入训练机器人的下料组件内,从而完成自动补料,综上可知,整个训练机器人能够自动补料,以保证训练机器人能够通过奖励机制正常训练宠物。
技术特征:
1.宠物训练排便机器人,其特征在于,包括:
2.根据权利要求1所述的宠物训练排便机器人,其特征在于:所述支撑结构包括四个侧支撑杆(28),所述侧支撑杆(28)的一端固定在出料箱(2)的外侧。
3.根据权利要求1所述的宠物训练排便机器人,其特征在于:所述外壳(3)的顶部安装有天线(7),所述天线(7)与信号传递模块(18)通过信号线建立电性连接。
4.根据权利要求1所述的宠物训练排便机器人,其特征在于:所述移动组件包括:
5.根据权利要求1所述的宠物训练排便机器人,其特征在于:所述下料组件包括;
6.根据权利要求5所述的宠物训练排便机器人,其特征在于:所述称重组件包括:
技术总结
本技术涉及机器人技术领域,具体是宠物训练排便机器人,包括:单独设立的出料箱,所述出料箱的外侧壁设置有支撑结构;中心轴横向设置的出料筒,所述出料箱的底部与出料筒相固定且相连通;第二伺服电机,所述第二伺服电机固定在出料筒上;有轴绞龙杆,所述出料筒的一端开设有转动孔,所述有轴绞龙杆的一端转动安装在转动孔内,且所述第二伺服电机的输出端与有轴绞龙杆同轴固定;铜制插孔,两个所述铜制插孔的整体均固定在出料筒另一端的外侧上,所述第二伺服电机的正负极接口分别通过电线与两个铜制插孔相连接;单独设立的训练机器人,所述训练机器人包括外壳,本技术能够自动补料,以保证训练机器人能够通过奖励机制正常训练宠物。
技术研发人员:邢智杰,马英豪,张耀峰,慎柄渊,唐林,郭子乙,何伊婧,吴雨豪,冯闯,吕博强,刘昊鑫,张润韬
受保护的技术使用者:西南石油大学
技术研发日:20231227
技术公布日:2024/7/25
- 还没有人留言评论。精彩留言会获得点赞!