一种基于机器视觉的自走式莴笋种、收、管一体机
本发明涉及农业种植、收割,具体为一种基于机器视觉的自走式莴笋种、收、管一体机。
背景技术:
1、莴笋作为我国重要蔬菜之一,年产量约为600万吨,位居全球第一,种植面积广阔。然而,由于莴笋的生长习性和栽培要求较高,规模化种植效果不佳,需要大量的人工参与,成本较高。尤其是在采摘莴笋时,首先需要先进行去叶,其次对其进行摘取,最后还要进行扎捆装车,这一过程费时费力,也是导致人工成本昂贵的主要原因之一。除此之外莴笋的种植、生长过程中的管理也要花费大量人工费用。
2、机械作业可以有效解决上述问题,然而目前针对莴笋收获进行研究开发的机器还处于起步阶段,在市场上只有大型设备可供选择,并且价格昂贵、功能单一且操作复杂,由此我们提出了一种基于机器视觉的自走式莴笋种、收、管一体机。
技术实现思路
1、本发明的目的在于提供一种基于机器视觉的自走式莴笋种、收、管一体机,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
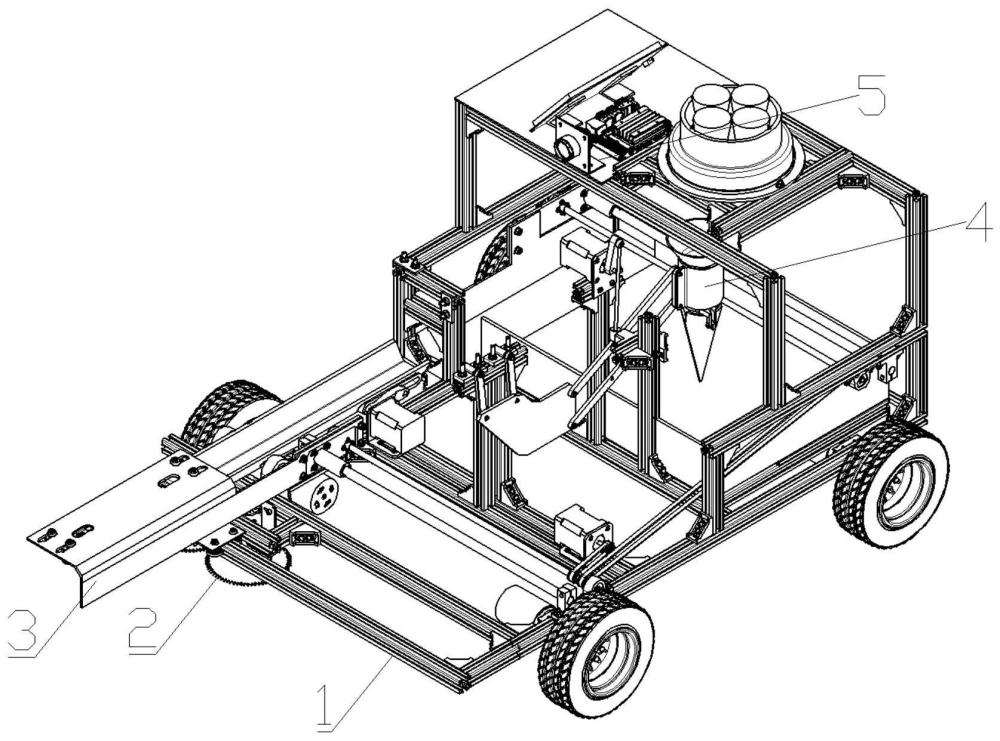
3、一种基于机器视觉的自走式莴笋种、收、管一体机,包括用于支撑机体移动的底盘装置,所述底盘装置前端一侧设有用于莴笋切割处理的切割装置;
4、所述底盘装置一侧设有用于莴笋去叶和收集的去叶收集装置;
5、所述去叶收集装置前端设有用于莴笋种植的移栽装置;
6、所述移栽装置顶端设有用于实时采收数据确定机器运动方向和病虫查找的视觉识别病虫害检测装置。
7、进一步,所述底盘装置包括底盘框架、车轮、底盘电机、收集框支架;
8、所述底盘框架表面两侧固定有对称的底盘电机,所述底盘电机前端固定于底盘框架,所述底盘电机输出端固定连接车轮;
9、所述底盘框架后端设有用于安装收集框的收集框支架。
10、进一步,所述底盘电机前端固定连接底盘电机安装板,所述底盘电机安装板通过螺栓与底盘框架固定。
11、进一步,所述切割装置包括切割机架、切割电机安装板、切割电机、旋转切割刀;
12、所述切割机架固定于底盘框架前端,所述切割机架表面前端固定有切割电机安装板,所述切割电机安装板通过螺栓与切割机架固定连接,所述切割电机设于切割电机安装板,所述切割电机输出端固定连接有旋转切割刀。
13、进一步,所述切割装置设有两套。
14、进一步,所述去叶收集装置包括去叶框、盛放槽、立式轴承座、盛放槽导轨曲柄、盛放槽电机、丝杆光轴板、丝杆、光杆、同步带轮、丝杠电机、气缸夹板、气缸、推杆、推板、收集框、长同步带轮、上丝杆、上光杆;
15、所述去叶框固定于底盘框架,所述盛放槽通过立式轴承座固定于底盘框架,所述盛放槽导轨曲柄两端分别连接盛放槽、盛放槽电机;
16、所述光杆、丝杆分别通过立式轴承座、光轴座平行安装于丝杠电机;
17、所述丝杆光轴板连接光杆、丝杆;
18、所述丝杆电机输出端通过同步带轮带动丝杠旋转;
19、所述气缸夹板连接丝杆光轴板,所述气缸通过螺栓与气缸夹板固定,所述推杆连接气缸;
20、所述推板连接上光杆、上丝杆,所述长同步带轮两端分别卡接于丝杆、上丝杆;
21、所述收集框连接底盘框架。
22、进一步,所述丝杆光轴板设有用于连接丝杆、光杆的丝杆孔、光杆孔,所述推板设有用于连接上丝杆、上光杆的丝杆孔、光杆孔。
23、进一步,所述移栽装置包括移栽杯、旋转圆盘、双孔底座、旋转电机、固定座、方向转化板、摆动电机、曲柄、拉杆、固定滑块、固定滑块底座、连杆、漏斗、移栽爪套、自闭拨片;
24、所述旋转圆盘设于双孔底座,所述移栽杯固定于旋转圆盘,所述双孔底座连接摆动电机;
25、所述方向转化板与连杆连接组成双摆杆机构,所述双摆杆机构通过固定滑块固定,所述固定滑块固定于固定滑块底座,所述固定滑块底座固定于底盘支架;
26、所述摆动电机固定于底盘支架,所述曲柄两端分别连接摆动电机、拉杆,所述拉杆固定于连杆,所述固定滑块套接于连杆;
27、所述移栽爪套上端固定漏斗,所述移栽爪套下端固定自闭拨片组成拨爪。
28、进一步,所述底盘支架固定于底盘框架。
29、进一步,所述视觉识别病虫害检测装置包括摄像头、开发板及显示屏,所述开发板分别与摄像头、显示屏连接。
30、与现有技术相比,本发明的有益效果是:
31、1、本发明可以实现莴笋切割、去叶、收集的同步进行,很好的提高了莴笋收获的效率,每收完一垄视觉识别系统便可以实现实时探察自动转弯,完成收获过程全自动;
32、2、本发明的移栽装置可以实现行进间种植;
33、3、本发明病虫害检测装置可以在莴笋生长过程中进行实施监测,提高了莴笋品质。
技术特征:
1.一种基于机器视觉的自走式莴笋种、收、管一体机,包括用于支撑机体移动的底盘装置(1),其特征在于:所述底盘装置(1)前端一侧设有用于莴笋切割处理的切割装置(2);
2.根据权利要求1所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述底盘装置(1)包括底盘框架(101)、车轮(102)、底盘电机(103)、收集框支架(104);
3.根据权利要求2所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述底盘电机(103)前端固定连接底盘电机安装板,所述底盘电机安装板通过螺栓与底盘框架(101)固定。
4.根据权利要求3所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述切割装置(2)包括切割机架(201)、切割电机安装板(202)、切割电机(203)、旋转切割刀(204);
5.根据权利要求4所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述切割装置(2)设有两套。
6.根据权利要求4所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述去叶收集装置(3)包括去叶框(301)、盛放槽(302)、立式轴承座(303)、盛放槽导轨曲柄(304)、盛放槽电机(305)、丝杆光轴板(306)、丝杆(307)、光杆(308)、同步带轮(309)、丝杠电机(310)、气缸夹板(311)、气缸(312)、推杆(313)、推板(314)、收集框(315)、长同步带轮(316)、上丝杆(317)、上光杆(318);
7.根据权利要求6所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述丝杆光轴板(306)设有用于连接丝杆(307)、光杆(308)的丝杆孔、光杆孔,所述推板(316)设有用于连接上丝杆(317)、上光杆(318)的丝杆孔、光杆孔。
8.根据权利要求6所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述移栽装置(4)包括移栽杯(401)、旋转圆盘(402)、双孔底座(403)、旋转电机(404)、固定座(405)、方向转化板(406)、摆动电机(407)、曲柄(408)、拉杆(409)、固定滑块(410)、固定滑块底座(411)、连杆(412)、漏斗(413)、移栽爪套(414)、自闭拨片(415);
9.根据权利要求8所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述底盘支架固定于底盘框架(101)。
10.根据权利要求1所述的一种基于机器视觉的自走式莴笋种、收、管一体机,其特征在于:所述视觉识别病虫害检测装置(5)包括摄像头(501)、开发板(502)及显示屏(503),所述开发板(502)分别与摄像头(501)、显示屏(503)连接。
技术总结
本发明公开了一种基于机器视觉的自走式莴笋种、收、管一体机,包括用于支撑机体移动的底盘装置,所述底盘装置前端一侧设有用于莴笋切割处理的切割装置;所述底盘装置一侧设有用于莴笋去叶和收集的去叶收集装置;所述去叶收集装置前端设有用于莴笋种植的移栽装置;所述移栽装置顶端设有用于实时采收数据确定机器运动方向和病虫查找的视觉识别病虫害检测装置。本发明可以实现莴笋切割、去叶、收集的同步进行,很好的提高了莴笋收获的效率,每收完一垄视觉识别系统便可以实现实时探察自动转弯,完成收获过程全自动;本发明的移栽装置可以实现行进间种植;本发明病虫害检测装置可以在莴笋生长过程中进行实施监测,提高了莴笋品质。
技术研发人员:王鑫,王梦瑶,刘训利,杨硕,吴善昊,夏添源,刘晨,成婧,高翔,周婧雯,郭华锋
受保护的技术使用者:徐州工程学院
技术研发日:
技术公布日:2024/6/23
- 还没有人留言评论。精彩留言会获得点赞!