本发明涉及智能农业装备领域,具体涉及一种面向凤梨花的对靶喷水机器人及其控制方法。
背景技术:
1、凤梨花又称观赏凤梨,是原产于墨西哥、巴西、阿根廷的一种高档花卉,近年来颇受市场欢迎。凤梨花根系不发达,主要从叶筒中吸收水分。喷水时需对准花芯以一定压力进行喷水,并保证叶筒内有水,同时盆内又忌积水以免烂根。
2、凤梨花批量生产主要在温室中进行,经常需要对凤梨花进行喷水,通过人力进行喷水费时、费力、效率低下;而通过机械设备进行喷水时对凤梨花芯的位置定位误差较大,可能导致水量过多落入盆内引起凤梨花烂根,同时水的利用率较低。
技术实现思路
1、针对现有技术中存在不足,本发明提供了一种面向凤梨花的对靶喷水机器人及其控制方法,实现精准智能对靶喷水,提高作业效率的同时提高水资源的利用率。
2、本发明是通过以下技术手段实现上述技术目的的。
3、一种面向凤梨花的对靶喷水机器人,包括:
4、移动装置,使得对靶喷水机器人沿苗床运动;
5、探测定位装置,对凤梨花芯进行识别以及位置坐标定位;
6、喷水装置,根据花芯位置控制喷头进行对靶,然后再进行变压变量喷施;
7、控制系统,包括控制箱,用于接收探测定位装置获取的信息,进而控制喷头进行对靶、变压变量喷施,所述控制箱还用于控制移动装置进行转向和行走;
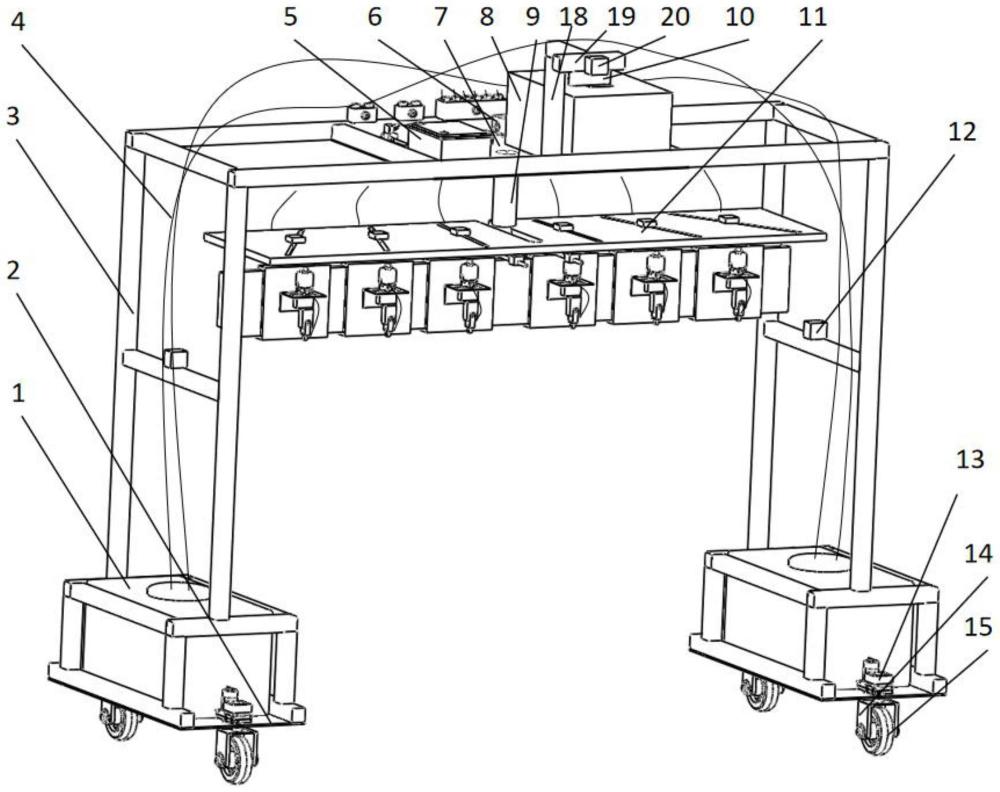
8、所述喷水装置包括水箱、水管、喷水压力调节单元、伸缩杆和对靶喷水机构,所述水箱设置在移动装置上,并通过水管依次与喷水液压调节单元、对靶喷水机构相连,所述对靶喷水机构通过伸缩杆连接在移动装置上部中间位置。
9、上述技术方案中,所述对靶喷水机构包括滑动轨道、定向滑块、位置分散板、丝杆滑块、丝杆、二自由度转向舵机、喷头、滑动模块和电机;所述滑动模块卡在滑动轨道一侧,且能够沿滑动轨道移动;所述定向滑块通过位置分散板上的分散滑槽与滑动模块顶部连接;所述丝杆滑块固定在位置分散板下方,并套设在丝杆上;所述电机通过电机固定板安装在滑动轨道上,所述丝杆与电机输出轴连接;所述二自由度转向舵机通过舵机安装板安装在滑动模块上;所述喷头卡套在二自由度转向舵机的u型支架的安装孔内。
10、上述技术方案中,所述喷水压力调节单元包括隔膜泵、压力传感器、电动调节阀、一分六分水器、一分二分水器a、溢流阀、电磁阀和一分二分水器b;从两个水箱各引两根水管,一根作为回水管,另一根作为出水管,两根回水管、两根出水管分别通过一个一分二分水器a形成总回水管和总出水管;所述总出水管与隔膜泵的进口端相连,隔膜泵的出口端通过一分二分水器b将管路分成两路,一条通过溢流阀连接总回水管流回水箱,另一条连接压力传感器、电动调节阀,并通过一分六分水器分成六条支路,再依次连接电磁阀和喷头。
11、上述技术方案中,所述移动装置包括数字舵机、前叉、轮毂电机、底板和机架,机架为龙门结构;所述机架两端固连在底板上部,所述底板两侧分别与数字舵机固连,所述数字舵机的转轴与前叉上部连接,所述前叉内侧固连轮毂电机。
12、上述技术方案中,所述探测定位装置包括深度相机、接近开关a和接近开关b,所述深度相机和接近开关b安装在机架上部中间位置,所述接近开关a固定在机架两侧的横梁上。
13、上述技术方案中,所述水箱由移动供水卷盘替换,移动供水卷盘一端由水管给对靶喷水机器人供水,另一端与外部水源连通。
14、一种面向凤梨花的对靶喷水机器人的控制方法:
15、步骤一、对靶喷水机器人上电,深度相机实时获取图像,下位机控制对靶喷水机器人沿苗床向前移动;
16、步骤二、上位机基于深度相机采集的信息计算机器人位置,当深度当相机的视野中出现凤梨花,且拟合点离检测线的距离小于等于设定距离时,下位机控制机器人逐渐减速并在指定位置停下;
17、步骤三、根据花芯高度,下位机控制伸缩杆调整喷头的高度;根据花芯位置,下位机控制电机调整多个喷头间距;根据上位机计算的对靶角度,下位机控制二自由度舵机进行旋转对靶;
18、步骤四、对靶完成后,根据凤梨花所处生长阶段、花芯体积以及花芯高度,上位机作出喷水压力和喷水量的决策,下位机控制电动调节阀进行调压,并通过控制电磁阀的开启时间来控制喷水量;
19、步骤五、喷水完成后,二自由度舵机复位,重复步骤一至步骤五。
20、进一步地,所述指定位置的获取方法为:深度相机获取一行中多盆花芯的中心点坐标,将中心点拟合成一条直线,以边缘的两个中心点为端点形成线段,取所述线段的中点为拟合点;所述花芯的中心点坐标所在图像中生成一条与前进方向垂直的线,作为检测线,当检测线与拟合点重合时,机器人正好处在指定位置。
21、进一步地于,所述花芯体积的获取方法为:根据深度相机获取的花芯定位目标框信息,进行局部点云提取,获取花芯的点云信息,先对点云数据进行去噪,然后通过提取点云边界点对叶杯进行三维重建,最后计算出叶杯的体积,即花芯体积。
22、进一步地,所述花芯位置的获取过程为:
23、识别到花芯后得到目标框,根据目标框左上坐标与轮廓的宽度、高度,得到中心点坐标,作为花芯的像素二维坐标;
24、在所述花芯的像素二维坐标附近获取多个偏置二维坐标,根据点云信息获取每个偏置二维坐标对应的三维坐标,选取这些点中z轴坐标最大的点作为最终的花芯点,至此获取花芯点在相机坐标系下的三维坐标,再将每个花芯的相机三维坐标转换到对应的喷头坐标系下,得到花芯坐标。
25、本发明的有益效果为:
26、(1)本发明的移动装置采取龙门结构横跨在苗床上进行作业,换行通过四轮转向的方式实现;适用于一些苗床宽度较宽、过道狭窄的温室,相较于搭建悬挂式轨道成本较低,适用性更广;
27、(2)本发明针对凤梨花的灌溉需要对准花芯位置进行浇水,通过深度相机获取图像信息、深度信息和点云信息并结合深度学习算法,终获得花芯的具体位置和花芯体积大小,满足了对靶和定量的要求;
28、(3)本发明考虑到凤梨花不同时期花芯高度不同,将凤梨花按生长阶段进行分类,并结合图像信息对不同时期的花芯高度动态调节喷头的高度和压力;
29、(4)本发明考虑到地面不平及凤梨花摆放不均匀的问题,利用接近开关和pid控制保证机器人沿苗床直线行走,并通过拟合出花芯中心位置的直线作为机器人停车作业的目标位置。
技术特征:1.一种面向凤梨花的对靶喷水机器人,其特征在于,包括:
2.根据权利要求1所述的面向凤梨花的对靶喷水机器人,其特征在于,所述对靶喷水机构(11)包括滑动轨道(11-1)、定向滑块(11-2)、位置分散板(11-3)、丝杆滑块(11-4)、丝杆(11-5)、二自由度转向舵机(11-7)、喷头(11-8)、滑动模块(11-9)和电机(11-10);所述滑动模块(11-9)卡在滑动轨道(11-1)一侧,且能够沿滑动轨道(11-1)移动;所述定向滑块(11-2)通过位置分散板(11-3)上的分散滑槽与滑动模块(11-9)顶部连接;所述丝杆滑块(11-4)固定在位置分散板(11-3)下方,并套设在丝杆(11-5)上;所述电机(11-10)通过电机固定板(11-11)安装在滑动轨道(11-1)上,所述丝杆(11-5)与电机(11-10)输出轴连接;所述二自由度转向舵机(11-7)通过舵机安装板(11-6)安装在滑动模块(11-9)上;所述喷头(11-8)卡套在二自由度转向舵机(11-7)的u型支架的安装孔内。
3.根据权利要求1所述的面向凤梨花的对靶喷水机器人,其特征在于,所述喷水压力调节单元(6)包括隔膜泵(6-1)、压力传感器(6-2)、电动调节阀(6-3)、一分六分水器(6-4)、一分二分水器a(6-5)、溢流阀(6-6)、电磁阀(6-7)和一分二分水器b(6-8);从两个水箱(1)各引两根水管,一根作为回水管,另一根作为出水管,两根回水管、两根出水管分别通过一个一分二分水器a(6-5)形成总回水管和总出水管;所述总出水管与隔膜泵(6-1)的进口端相连,隔膜泵(6-1)的出口端通过一分二分水器b(6-8)将管路分成两路,一条通过溢流阀(6-6)连接总回水管流回水箱(1),另一条连接压力传感器(6-2)、电动调节阀(6-3),并通过一分六分水器(6-4)分成六条支路,再依次连接电磁阀(6-7)和喷头(11-8)。
4.根据权利要求1所述的面向凤梨花的对靶喷水机器人,其特征在于,所述移动装置包括数字舵机(13)、前叉(14)、轮毂电机(15)、底板(2)和机架(3),机架(3)为龙门结构;所述机架(3)两端固连在底板(2)上部,所述底板(2)两侧分别与数字舵机(13)固连,所述数字舵机(13)的转轴与前叉(14)上部连接,所述前叉(14)内侧固连轮毂电机(15)。
5.根据权利要求4所述的面向凤梨花的对靶喷水机器人,其特征在于,所述探测定位装置包括深度相机(10)、接近开关a(12)和接近开关b(20),所述深度相机(10)和接近开关b(20)安装在机架(3)上部中间位置,所述接近开关a(12)固定在机架(3)两侧的横梁上。
6.根据权利要求1所述的面向凤梨花的对靶喷水机器人,其特征在于,所述水箱(1)由移动供水卷盘(17)替换,移动供水卷盘(17)一端由水管(4)给对靶喷水机器人供水,另一端与外部水源连通。
7.一种基于权利要求1-6任一项所述的面向凤梨花的对靶喷水机器人的控制方法,其特征在于:
8.根据权利要求7所述的控制方法,其特征在于,所述指定位置的获取方法为:深度相机(10)获取一行中多盆花芯的中心点坐标,将中心点拟合成一条直线,以边缘的两个中心点为端点形成线段,取所述线段的中点为拟合点;所述花芯的中心点坐标所在图像中生成一条与前进方向垂直的线,作为检测线,当检测线与拟合点重合时,机器人正好处在指定位置。
9.根据权利要求7所述的控制方法,其特征在于,所述花芯体积的获取方法为:根据深度相机(10)获取的花芯定位目标框信息,进行局部点云提取,获取花芯的点云信息,先对点云数据进行去噪,然后通过提取点云边界点对叶杯进行三维重建,最后计算出叶杯的体积,即花芯体积。
10.根据权利要求7所述的控制方法,其特征在于,所述花芯位置的获取过程为:
技术总结本发明公开了一种面向凤梨花的对靶喷水机器人及其控制方法,对靶喷水机器人包括移动装置、探测定位装置、喷水装置和控制系统;移动装置采用龙门结构横跨在苗床上,并通过四轮转向进行换行;探测定位装置通过深度相机完成一行多盆凤梨花的花芯位置的探测和定位;喷水装置根据各个花芯的位置信息分别控制相应喷头进行对靶;控制系统实现移动装置、探测定位装置、喷水装置之间的协同配合,根据凤梨花的花芯高度、花芯体积和生长阶段,实时控制喷水的压力和流量进行喷水。本发明实现了对凤梨花的精准智能对靶喷水,提高了作业效率和水资源的利用率。
技术研发人员:王纪章,刘哲,朱鹏晓,周静,黄志刚,袁俊杰
受保护的技术使用者:江苏大学
技术研发日:技术公布日:2024/6/20