一种莲蓬采摘机器人末端执行机构
本发明涉及农业果蔬采摘领域,尤其涉及一种莲蓬采摘机器人末端执行机构。
背景技术:
1、莲蓬的生长环境特殊,大多数种植于淤泥之中,人工采摘环境复杂,耗时耗力,效率低下,导致莲蓬的单产收入受到了很大的限制,无法满足市场对莲蓬时令性和新鲜度的要求。cn111543179a公开了一种基于标准化莲田的自动莲蓬采摘机,包括固定机架、行走装置、识别模块、采摘机构和运送收集装置,行走装置带动整个固定机架移动,其中包含转向电机组、减震器和轮毂电机;识别模块包含图像采集模块、图像处理模块与莲蓬识别模块;3组采摘机构根据图像处理与莲蓬识别模块发送的定位数据对莲蓬进行采摘,采摘机构固定在机架上,其包括x轴滑动组,由齿轮齿条机构传动,z轴升降组通过滚珠丝杆传动安装在x轴滑动组上,以及固定在z轴升降组末端的采摘机械臂,采摘机械臂包括大臂、小臂和夹持剪切装置;运送收集装置包括传输带和收集筐。该机能够改善人工采摘莲蓬的传统模式,降低人工劳动力。其存在的不足是,体积较大难以应对莲蓬复杂的生长环境,同时大体积的采摘装置加以铺设的运行轨道造成农田的播种面积减少,因此工作效率未能得到有效提高。
技术实现思路
1、本发明的目的是克服上述背景技术的不足,提出一种莲蓬采摘机器人末端执行机构,该末端执行机构应具有采摘效率高、不易损伤果实的特点。
2、本发明提供的技术方案是:
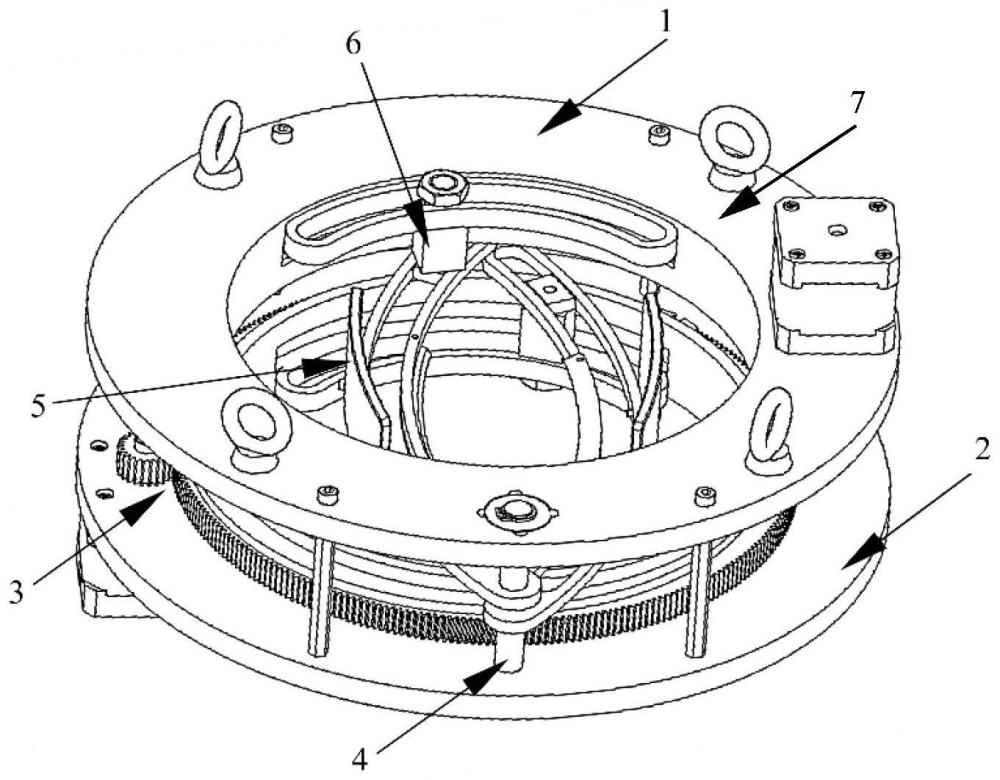
3、一种莲蓬采摘机器人末端执行机构,其特征在于:该末端执行机构包括同轴布置并且相互保持间隙的上齿轮座与下齿轮座以及设置在上下齿轮座之间且由步进电机驱动的传动机构、切割机构与包覆机构;
4、所述上齿轮座和下齿轮座的内环边缘分别连有一圆筒形的座环,两个座环分别朝对方相向突出并且保持间距,两个座环上还分别可转动地套设着一从动大齿轮;两个座环的圆周面上还分别设置有月牙型轨道;
5、传动机构包括安装在上齿轮座内侧端面和下齿轮座内侧端面的两个主动小齿轮以及与主动小齿轮啮合的两个所述从动大齿轮;
6、切割机构包括安装在上齿轮座和下齿轮座之间且分别带有刀片的一对月牙型刀片支架以及由一对月牙型刀片支架驱动的两个齿轮座连接件;所述一对月牙型刀片支架可绕支架旋转轴转动地定位于上下齿轮座之间的所述间隙中;每个齿轮座连接件包括穿插在月牙型轨道中并且沿着月牙型轨道滑动的阶梯轴、固定在阶梯轴上且与月牙型刀片支架的弧型轨道滑动配合的滑块以及套设在阶梯轴上且与所述从动大齿轮啮合驱动的齿轮连接件。
7、所述从动大齿轮通过开设在自身内侧的一方形齿槽,与齿轮连接件外缘的方形齿啮合并进行传动。
8、所述月牙型轨道的轨道中心线与座环同轴布置。
9、两个月牙型刀片支架的一端可转动地定位在支架旋转轴上,支架旋转轴又平行于上下齿轮座的轴线布置并且上下两端分别固定在上下齿轮底座上。
10、所述支架旋转轴与月牙型轨道的中点,位于上下齿轮座的同一直径线上,并且分置于上下齿轮座轴线的两侧。
11、包覆机构包括分别固定在两个月牙型刀片支架外侧的两个弧形挡片。
12、所述阶梯轴平行于上下齿轮底座的轴线布置并且依序穿插在齿轮底座的月牙型轨道、一个齿轮连接件、一个滑块之后,底端再与一螺母固定。
13、所述步进电机分别设置在上齿轮座和下齿轮座的外侧端面上。
14、所述步进电机的输出轴从齿轮座外侧端面穿插伸入到内侧端面后再固定连接所述的主动小齿轮。
15、本发明的有益效果:本发明体积较小,利用两个步进电机分别控制左右月牙型刀片支架,切割莲蓬茎秆的灵活性好,适应在复杂环境中工作,提高了采摘效率;传动机构中小齿轮带动大齿轮,与步进电机配合,切割过程中的控制精度更高;通过控制月牙型刀片支架和包覆机构的曲度,切割莲蓬茎秆过程中避免了刚性材料直接与果实接触与摩擦碰撞造成的果实损伤;采摘过程中不涉及对莲蓬果实的接触,可以适应不同农艺参数的莲蓬植株,适应性好。
技术特征:
1.一种莲蓬采摘机器人末端执行机构,其特征在于:该末端执行机构包括同轴布置并且相互保持间隙的上齿轮座(1)与下齿轮座(2)以及设置在上下齿轮座之间且由步进电机驱动的传动机构(3)、切割机构(4)与包覆机构(5);
2.根据权利要求1所述的莲蓬采摘机器人末端执行机构,其特征在于:所述从动大齿轮通过开设在自身内侧的一方形齿槽,与齿轮连接件外缘的方形齿(604)啮合并进行传动。
3.根据权利要求2所述的莲蓬采摘机器人末端执行机构,其特征在于:所述月牙型轨道的轨道中心线与座环同轴布置。
4.根据权利要求3所述的莲蓬采摘机器人末端执行机构,其特征在于:两个月牙型刀片支架的一端可转动地定位在支架旋转轴上,支架旋转轴又平行于上下齿轮座的轴线布置并且上下两端分别固定在上下齿轮底座上。
5.根据权利要求4所述的莲蓬采摘机器人末端执行机构,其特征在于:所述支架旋转轴与月牙型轨道的中点,位于上下齿轮座的同一直径线上,并且分置于上下齿轮座轴线的两侧。
6.根据权利要求5所述的莲蓬采摘机器人末端执行机构,其特征在于:所述包覆机构包括分别固定在两个月牙型刀片支架外侧的两个弧形挡片。
7.根据权利要求6所述的莲蓬采摘机器人末端执行机构,其特征在于:所述阶梯轴平行于上下齿轮底座的轴线布置并且依序穿插在齿轮底座的月牙型轨道、一个齿轮连接件、一个滑块之后,底端再与一螺母固定。
8.根据权利要求7所述的莲蓬采摘机器人末端执行机构,其特征在于:所述步进电机分别设置在上齿轮座和下齿轮座的外侧端面上。
9.根据权利要求8所述的莲蓬采摘机器人末端执行机构,其特征在于:所述步进电机的输出轴从齿轮座外侧端面穿插伸入到内侧端面后再固定连接所述的主动小齿轮。
技术总结
本发明涉及农业果蔬采摘领域,目的是提供一种莲蓬采摘机器人末端执行机构,该末端执行机构应具有采摘效率高、不易损伤果实的特点。技术方案是一种莲蓬采摘机器人末端执行机构,其特征在于:该末端执行机构包括同轴布置并且相互保持间隙的上齿轮座与下齿轮座以及设置在上下齿轮座之间且由步进电机驱动的传动机构、切割机构与包覆机构。
技术研发人员:严昊,张雷,叶秉良,姚岚
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/6/13
- 还没有人留言评论。精彩留言会获得点赞!