用于控制农业收割机的空气辅助输送系统的系统和方法与流程
本公开总体上涉及用于控制农业收割机的空气辅助输送系统的系统和方法。
背景技术:
1、农业收割机被用来收割农产品(例如,棉花或其它天然材料(一种或多种))。例如,农业收割机可以包含具有滚筒的收割台,所述滚筒被构造成从田地收割农产品。农业收割机还可以包含空气辅助输送系统,所述空气辅助输送系统被构造成使农产品从滚筒移动至收集器。农产品然后可以被进给至打捆机中(例如,经由带(一个或多个))。打捆机可以将农产品压缩至包装中,以便于农产品的储存、运输和处理。例如,圆形打捆机可以在打捆室内将农产品压缩成圆形捆,以使得所述圆形捆具有期望的尺寸和密度。在形成捆之后,可以用捆包裹物包裹捆以将农产品固定于捆内并且大致保持捆的形状。不幸的是,在某些操作状况下,农产品可能会堵塞于空气辅助输送系统的至少一个线路内,从而干扰农业收割机的操作。
技术实现思路
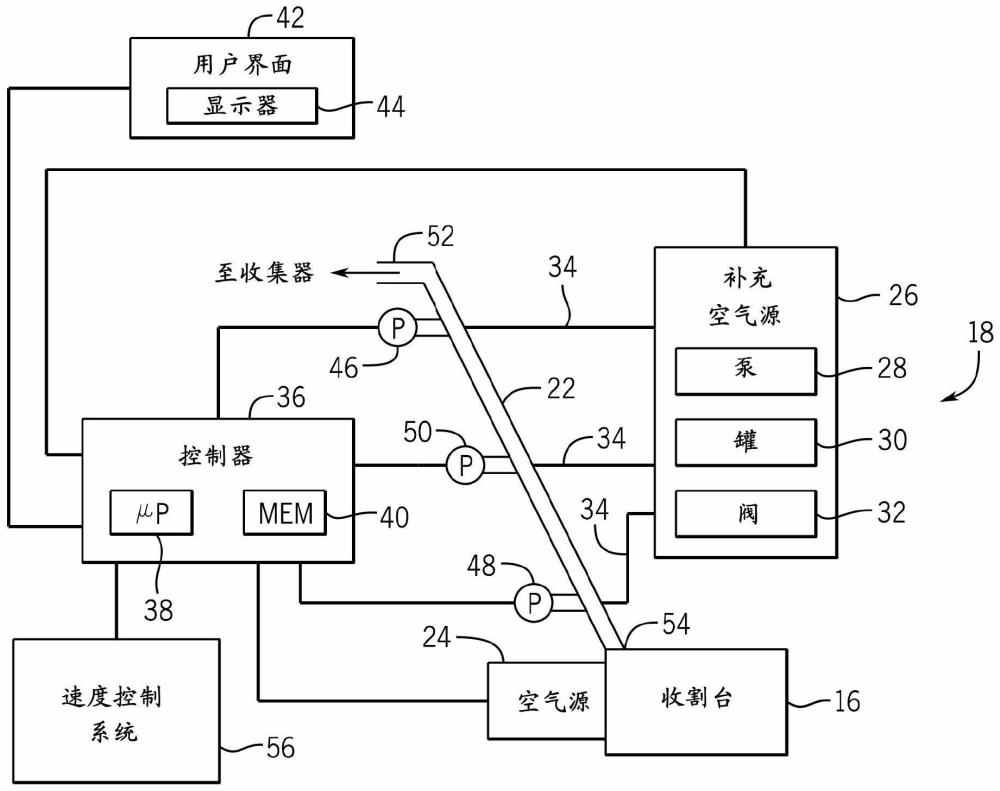
1、在某些实施例中,一种农业收割机的空气辅助输送系统包含具有存储器和处理器的控制器。所述控制器被构造成接收指示所述空气辅助输送系统的线路内的第一位置处的第一空气压力的第一传感器信号,并且所述控制器被构造成接收指示所述空气辅助输送系统的线路内的第二位置处的第二空气压力的第二传感器信号。此外,所述控制器被构造成基于所述第一空气压力和所述第二空气压力确定空气压力差。响应于确定所述空气压力差大于阈值,所述控制器被构造成控制补充空气源以在补充空气持续时间内向线路提供补充空气。另外,响应于在补充空气持续时间期间确定所述空气压力差大于所述阈值,所述控制器被构造成控制工作空气源以增加通过所述线路的工作空气流。
技术特征:
1.一种农业收割机的空气辅助输送系统,包括:
2.根据权利要求1所述的空气辅助输送系统,其中,控制所述工作空气源以增加所述工作空气流包括迭代地增加所述工作空气流,直至所述空气压力差小于或等于所述阈值或者达到最大迭代次数。
3.根据权利要求2所述的空气辅助输送系统,其中,所述控制器被构造成控制所述补充空气源,以响应于所述工作空气流的每次增加在所述补充空气持续时间内提供所述补充空气。
4.根据权利要求2所述的空气辅助输送系统,其中,所述控制器被构造成控制速度控制系统,以响应于达到最大迭代次数而降低所述农业收割机的地面速度。
5.根据权利要求4所述的空气辅助输送系统,其中,控制所述速度控制系统以降低所述地面速度包括迭代地降低所述地面速度,直至所述空气压力差小于或等于所述阈值。
6.根据权利要求4所述的空气辅助输送系统,其中,在控制所述速度控制系统以降低所述地面速度之后,所述控制器被构造成迭代地降低所述工作空气流,直至所述空气压力差大于第二阈值。
7.根据权利要求1所述的空气辅助输送系统,其中,所述控制器被构造成接收第三传感器信号,所述第三传感器信号指示所述空气辅助输送系统的所述线路内的第三位置处的第三空气压力,并且所述控制器被构造成基于所述第一空气压力、所述第二空气压力、以及所述第三空气压力确定所述空气压力差。
8.一种方法,包括:
9.根据权利要求8所述的方法,其中,控制所述工作空气源以增加所述工作空气流包括迭代地增加所述工作空气流,直至所述空气压力差小于或等于所述阈值或达到最大迭代次数。
10.根据权利要求9所述的方法,包括经由所述控制器控制所述补充空气源,以响应于所述工作空气流的每次增加在所述补充空气持续时间内提供所述补充空气。
11.根据权利要求9所述的方法,包括经由所述控制器控制速度控制系统,以响应于达到最大迭代次数而降低所述农业收割机的地面速度。
12.根据权利要求11所述的方法,其中,控制所述速度控制系统以降低所述地面速度包括迭代地降低所述地面速度,直至所述空气压力差小于或等于所述阈值。
13.根据权利要求11所述的方法,包括在控制所述速度控制系统以降低所述地面速度之后,经由所述控制器控制所述工作空气源以迭代地降低所述工作空气流,直至所述空气压力差大于第二阈值。
14.根据权利要求8所述的方法,包括经由所述控制器接收第三传感器信号,所述第三传感器信号指示所述空气辅助输送系统的所述线路内的第三位置处的第三空气压力,其中基于所述第一空气压力、所述第二空气压力、以及所述第三空气压力确定所述空气压力差。
15.一种农业收割机的空气辅助输送系统,包括:
16.根据权利要求15所述的空气辅助输送系统,其中,控制所述速度控制系统以降低所述地面速度包括迭代地降低所述地面速度,直至所述空气压力差小于或等于所述阈值。
17.根据权利要求15所述的空气辅助输送系统,其中,在控制所述速度控制系统以降低所述地面速度之后,所述控制器被构造成迭代地降低所述工作空气流,直至所述空气压力差大于第二阈值。
18.根据权利要求15所述的空气辅助输送系统,其中,所述控制器被构造成接收第三传感器信号,所述第三传感器信号指示所述空气辅助输送系统的所述线路内的第三位置处的第三空气压力,并且所述控制器被构造成基于所述第一空气压力、所述第二空气压力、以及所述第三空气压力确定所述空气压力差。
19.根据权利要求15所述的空气辅助输送系统,包括通信地联接至所述控制器的显示器,其中所述控制器被构造成控制所述显示器以呈现所述空气压力差、所述工作空气源的输出、所述农业收割机的地面速度、或其组合。
20.根据权利要求15所述的空气辅助输送系统,包括:
技术总结
一种农业收割机的空气辅助输送系统包含控制器,所述控制器被构造成接收指示线路内的第一位置处的第一空气压力的第一传感器信号,以及接收指示所述线路内的第二位置处的第二空气压力的第二传感器信号。此外,所述控制器被构造成基于所述第一空气压力和所述第二空气压力确定空气压力差。响应于确定所述空气压力差大于阈值,所述控制器被构造成控制补充空气源以在补充空气持续时间内向所述线路提供补充空气。另外,响应于在所述补充空气持续时间期间确定所述空气压力差大于所述阈值,所述控制器被构造成控制工作空气源以增加通过所述线路的工作空气流。
技术研发人员:M·J·罗伯奇,J·E·里基茨
受保护的技术使用者:凯斯纽荷兰工业美国有限责任公司
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!