鱼料投喂装置、鱼料投喂方法以及重力式网箱养殖系统与流程
本发明涉及海水养殖,特别涉及一种鱼料投喂装置、鱼料投喂方法以及重力式网箱养殖系统。
背景技术:
1、重力式网箱养殖系统是指利用重力式网箱进行海上鱼类养殖,通过重力式网箱利用波高随水深等比衰减的特性,能够有效减少波浪力对网箱和养殖鱼类的损害和影响,增加海水养殖的经济效益。
2、在现有技术中,重力式网箱养殖系统中的鱼料投喂装置安装在重力式网箱上;由于重力式网箱受到海浪的影响会发生浮沉波动运动,从而带动鱼料投喂装置也相应发生浮沉波动运动;如此一来,在浮沉波动运动的情况下采用压力传感单元测量饲料存储仓当前重量会存在较大误差,使得饲料投喂量无法根据投喂前饲料存储仓的重量减去投喂后饲料存储仓的重量的方式进行计算得出,作业人员在饲料投喂量无法确定的情况下容易造成投喂过量或者投喂不足的情况。
3、要说明的是,上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的是提出一种鱼料投喂装置、鱼料投喂方法以及重力式网箱养殖系统,旨在实现能够对饲料存储仓的当前重量进行准确测量,从而获取准确的饲料投喂量数据,减小投喂过量或者投喂不足的情况发生。
2、为实现上述目的,本发明提出一种鱼料投喂装置,应用于重力式网箱养殖系统;所述鱼料投喂装置包括:
3、饲料存储仓,所述饲料存储仓用于存储鱼料;所述饲料存储仓的底部设有出料口;
4、压力传感单元,所述压力传感单元用于测量当前所述饲料存储仓的测量重量;
5、加速度传感单元,所述加速度传感单元用于测量所述饲料存储仓在波浪力的作用下进行浮沉波动运动时的纵向加速度。
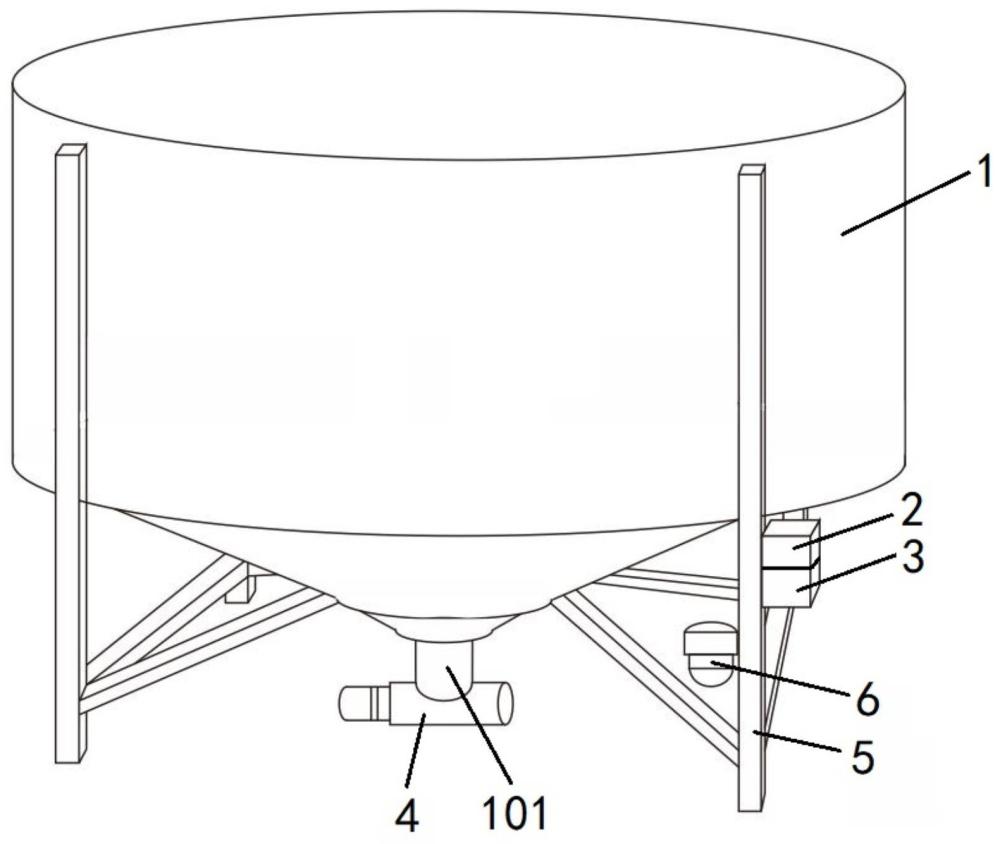
6、在一实施方式中,所述饲料存储仓的上部分成圆柱形结构,所述饲料存储仓的下部分呈圆台形结构,所述圆台形结构中直径相对大的一端与所述圆柱形结构相连接,所述圆台形结构中直径相对小的一端设有所述出料口。
7、在一实施方式中,所述出料口设有饲料输送装置,所述饲料输送装置采用螺杆式输料结构。
8、在一实施方式中,所述鱼料投喂装置包括通信控制单元,所述通信控制单元的第一数据端与所述压力传感单元、所述加速度传感单元以及所述饲料输送装置电性连接,所述通信控制单元的第二数据端与岸基控制中心电性连接。
9、在一实施方式中,所述鱼料投喂装置包括安装架,所述饲料存储仓通过所述安装架与所述重力式网箱养殖系统的重力式网箱相连接;所述安装架与所述重力式网箱之间存在至少三个连接端。
10、在一实施方式中,所述鱼料投喂装置包括视频监控装置,所述视频监控装置用于所述出料口的出料情况以及海面情况。
11、为实现上述目的,本发明还提出一种鱼料投喂方法,包括上述任一项的鱼料投喂装置;包括如下步骤:
12、采用所述压力传感单元测量当前所述饲料存储仓的第一测量重量g1,以及利用所述加速度传感单元测量当前所述饲料存储仓在波浪力的作用下进行浮沉波动运动时的第一纵向加速度a1;根据第一测量重量g1以及第一纵向加速度a1计算得出第一实际重量g1,其中g1=g1/a1;
13、开启所述出料口进行鱼料投喂操作;
14、采用所述压力传感单元测量当前所述饲料存储仓的第二测量重量g2,以及利用所述加速度传感单元测量当前所述饲料存储仓在波浪力的作用下进行浮沉波动运动时的第二纵向加速度a2;根据第二测量重量g2以及第二纵向加速度a2计算得出第二实际重量g2,其中g2=g2/a2;
15、根据所述第一实际重量g1以及第二实际重量g2计算得出饲料投喂量w,其中w=g1-g2。
16、在一实施方式中,在所述开启所述出料口进行鱼料投喂操作的步骤中,包括如下步骤:
17、选择投喂模式,并根据所述投喂模式进行鱼料投喂操作;其中所述投喂模式包括实时模式、定时模式以及定量模式;具体的,
18、所述实时模式是作业人员根据实时投喂情况对鱼料投喂操作的停止与否进行操作;
19、所述定时模式是通过设置预设时间,当投喂时间达到所述预设时间时停止鱼料投喂操作;
20、所述定量模式是通过设置预设投喂量,当饲料投喂量达到所述预设投喂量时停止鱼料投喂操作。
21、为实现上述目的,本发明还提出一种重力式网箱养殖系统,包括上述任一项的鱼料投喂装置,或者采用上述任一项的鱼料投喂方法。
22、本发明的技术方案通过在饲料存储仓上设置压力传感单元以及加速度传感单元,利用压力传感单元测量当前饲料存储仓的测量重量,并利用加速度传感单元测量饲料存储仓在波浪力的作用下进行浮沉波动运动时的纵向加速度;根据质量计算公式m=g/g(其中m是质量,g是重力,g是重力加速度),在静止状态下重力加速度g≈9.8n/kg,然而由于本申请中饲料存储仓在波浪力的作用下进行浮沉波动运动时,其运动过程会产生一纵向加速度,并且其纵向加速度≠重力加速度,因此需要额外设置加速度传感单元对饲料存储仓的纵向加速度进行测量;而重力g可理解为利用压力传感单元所测得的饲料存储仓的当前重量,质量m可理解为饲料存储仓的实际重量;因此通过将饲料存储仓的当前重量除以测量饲料存储仓的当前纵向加速度,即可得到饲料存储仓的当前实际重量;从而实现能够对饲料存储仓的当前重量进行准确测量,进而获取准确的饲料投喂量数据,减小投喂过量或者投喂不足的情况发生。
技术特征:
1.一种鱼料投喂装置,应用于重力式网箱养殖系统;其特征在于,所述鱼料投喂装置包括:
2.如权利要求1所述的鱼料投喂装置,其特征在于:所述饲料存储仓的上部分成圆柱形结构,所述饲料存储仓的下部分呈圆台形结构,所述圆台形结构中直径相对大的一端与所述圆柱形结构相连接,所述圆台形结构中直径相对小的一端设有所述出料口。
3.如权利要求2所述的鱼料投喂装置,其特征在于:所述出料口设有饲料输送装置,所述饲料输送装置采用螺杆式输料结构。
4.如权利要求3所述的鱼料投喂装置,其特征在于:所述鱼料投喂装置包括通信控制单元,所述通信控制单元的第一数据端与所述压力传感单元、所述加速度传感单元以及所述饲料输送装置电性连接,所述通信控制单元的第二数据端与岸基控制中心电性连接。
5.如权利要求1所述的鱼料投喂装置,其特征在于:所述鱼料投喂装置包括安装架,所述饲料存储仓通过所述安装架与所述重力式网箱养殖系统的重力式网箱相连接;所述安装架与所述重力式网箱之间存在至少三个连接端。
6.如权利要求1所述的鱼料投喂装置,其特征在于:所述鱼料投喂装置包括视频监控装置,所述视频监控装置用于所述出料口的出料情况以及海面情况。
7.一种鱼料投喂方法,其特征在于:包括如权利要求1至6任一项所述的鱼料投喂装置;包括如下步骤:
8.如权利要求7所述的鱼料投喂方法,其特征在于:在所述开启所述出料口进行鱼料投喂操作的步骤中,包括如下步骤:
9.如权利要求8所述的鱼料投喂方法,其特征在于:
10.一种重力式网箱养殖系统,其特征在于:包括如权利要求1至6任一项所述的鱼料投喂装置,或者采用如权利要求7至9任一项所述的鱼料投喂方法。
技术总结
本发明公开了一种鱼料投喂装置、鱼料投喂方法以及重力式网箱养殖系统,涉及海水养殖技术领域,所述鱼料投喂装置包括饲料存储仓,所述饲料存储仓用于存储鱼料;所述饲料存储仓的底部设有出料口;压力传感单元,所述压力传感单元用于测量当前所述饲料存储仓的测量重量;加速度传感单元,所述加速度传感单元用于测量所述饲料存储仓在波浪力的作用下进行浮沉波动运动时的纵向加速度。本发明提供的技术方案能够对饲料存储仓的当前重量进行准确测量,从而获取准确的饲料投喂量数据,减小投喂过量或者投喂不足的情况发生。
技术研发人员:杨仁友,张春文,李日富,崔志坚,杨靓
受保护的技术使用者:南方海洋科学与工程广东省实验室(湛江)
技术研发日:
技术公布日:2024/7/29
- 还没有人留言评论。精彩留言会获得点赞!