一种福寿螺水下智能识别及主动抓捕装置及工作方法
本发明涉及水生生物捕捞,尤其涉及一种福寿螺水下智能识别及主动抓捕装置及工作方法。
背景技术:
1、福寿螺是一种中腹足目瓶螺科瓶螺属的硬壳软体动物。福寿螺个体较大,食性广泛,繁殖力强,喜欢水草丰盛、水质清新、通气良好的水域,是一些珍贵水产动物的饲料。但食用生的或加热不彻底的福寿螺会感染脑膜脑炎,引起头痛、发热、颈部强硬等症状,严重者可致痴呆甚至死亡。
2、在现有的螺类捕捞方法中人们通常进行人工捕捞和机械捕捞。针对福寿螺,它是很多线虫、吸虫等寄生虫的中间宿主,如广州管圆线虫、后圆线虫、卷棘口吸虫等会导致头痛、呕吐甚至精神异常等,危害健康。也不宜用手直接接触,捕捞者对于一般螺类在潮间带或滩涂上搜索福寿螺,然后用手或工具将其捞出的方法不再适用。使用网具是一种较为高效的捕捞方法,捕捞者会在福寿螺常出没的地方设置捕捞网,将诱饵放置在合适的位置,等待福寿螺主动进入网内,然后将其捕获。这些方式都需耗费大量人力物力在水面水下巡视,且人视力有限,在河道、水库由于深度深与浑浊度高,大大降低可见度使人工作业变得更加艰难,且现场人员操作可能由于不专业、保护不完善而导致沾染寄生虫对自身健康造成影响;抽干河道、水库,对普通鱼类也造成经济损失;生物方法或者化学方法都需要投入大量设备及具有专业能力的人员,也可能对环境造成伤害,或者这些方法无法在此区域根除福寿螺;当前市场上所售卖的也没有专业用于捕捞福寿螺的水下航行装置。
技术实现思路
1、为了解决上述现有技术中福寿螺在河道、水库的甄别、捕捞较为困难的问题。
2、本发明提出了一种福寿螺水下智能识别及主动抓捕装置。本发明是通过以下技术方案实现的:
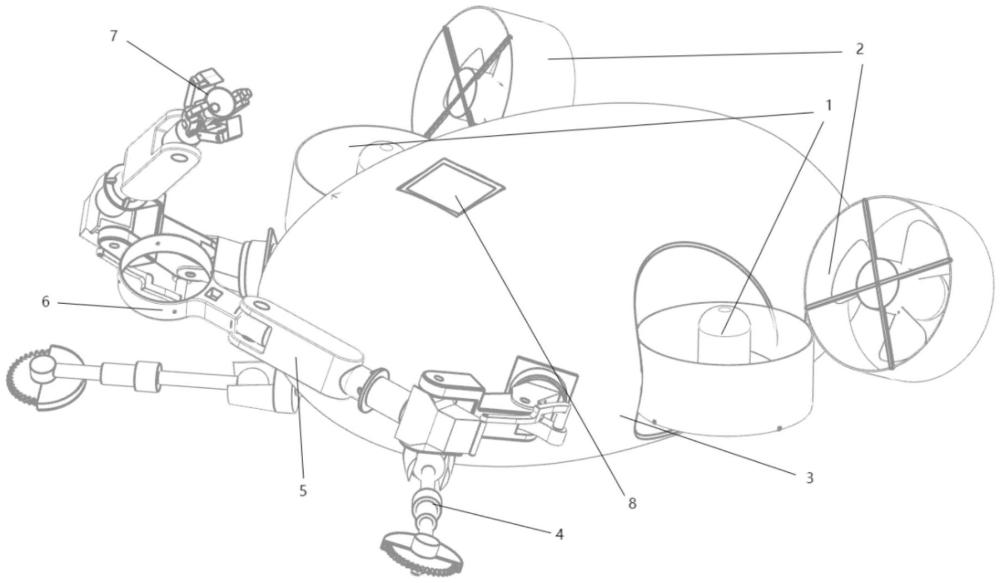
3、本发明包括舱体、抓捕机械臂以及驱动机构,所述抓捕机械臂设置在舱体行进方向的前端且末端与舱体连接,驱动机构设置在舱体行进方向的后端,所述抓捕机械臂数量为两个,其中一个抓捕机械臂首端设置兜网,另一个抓捕机械臂首端设置机械手,控制模块设置在抓捕机械臂与舱体连接处,运动机构设置在抓捕机械臂中部;还包括设置在舱体行进方向的前端的万向切割机,所述舱体内部设置总控模块、电池模块、舱内容器、第一照明模块、第一监控与识别模块、传感器模块、开合门以及出口,所述舱内容器通过两个舱内容器通道分别连接设置在舱体顶部的开合门以及底部的出口,在舱体行进方向的前端设置有第二照明模块和第二监控与识别模块,总控模块置于舱体内部的底部并控制抓捕装置的所有运动状态,所述电池模块设置在舱体底部并为整个抓捕装置提供电力,第一照明模块设置在舱内容器两侧,第一监控与识别模块和传感器模块设置在舱内容器顶部,舱体行进方向的前端还设置有第二监控与识别模块以及第二照明模块。
4、进一步的,所述总控模块包括智能识别模块、gps定位模块以及无线收发器,所述智能识别模块通过efficientdet目标检测算法判断生物或物体的类别,并运用水下图像增强算法,对画面进行优化提升。
5、进一步的,所述电池模块包含四块小型高容量软包电池。
6、进一步的,所述第一照明模块由八颗led灯组成。
7、进一步的,所述第一监控与识别模块包含高清摄像头和传输元件,所述传感器模块包括四颗智能传感器。
8、进一步的,所述第二监控与识别模块由高清摄像头和传输元件组成,设置在舱体行进方向的前端两侧,与第二照明模块集成。
9、进一步的,所述万向切割机数量为两个,设置在舱体行进方向的前端两侧下方,包含单相串励电动机、减速箱、防护罩和圆锯片。
10、进一步的,所述出口由开合门和充电口组成。
11、进一步的,所述驱动机构包含两个第一螺旋推进器和两个第二螺旋推进器,分别嵌入舱体行进方向的中部和后端,所述第一螺旋推进器平行于舱体行进方向布置,第二螺旋推进器垂直于舱体行进方向布置。
12、本发明设计的一种用于福寿螺水下智能识别及主动抓捕装置的工作方法,包含如下步骤:
13、s1、总控模块发送信号到第二监控与识别模块和第二照明模块,打开第二照明模块,同时,第二监控与识别模块对前方视野进行探测,并将画面实时传输到总控模块,若前方为大片水草,则总控模块发送信号至万向切割机,万向切割机开始工作清理水草;若前方仅有少量水草或无水草等障碍,则总控模块发送信号至驱动机构继续前进;
14、s2、总控模块识别检测到前方有福寿螺时,若前方区域存在少量水草及少量福寿螺,则向控制模块发出抓捕指令,控制模块控制机械手移动或拨开水草清理路线,对福寿螺进行抓取收集;若前方区域存在较多福寿螺,则向控制模块发出捕捞指令,控制模块控制兜网对福寿螺进行捕捞;
15、s3、总控模块发送信号至开合门,开合门打开,抓捕机械臂将抓捕到的福寿螺放入舱体内,福寿螺通过舱内容器通道进入舱内容器,开合门关闭,抓捕机械臂继续进行福寿螺捕捞工作;
16、s4、第一监控与识别模块和传感器模块对舱体内部进行实时监测,并将数据发送给总控模块,若舱内容器内装满福寿螺或者舱体内水压、温度数据异常或者电池模块电量低于%,则总控模块向驱动机构发送返回指令,控制装置立即返回岸边;
17、s5、总控模块发送信号至出口的开合门,开合门打开,清理舱内容器内部的福寿螺。
18、与现有技术相比,本发明的有益效果在于:
19、(1)本发明实现了清理阻挡视野和路径的水草或杂物,在水下自由移动,实现自动观测、智能识别、抓捕和存储于一体。
20、(2)本发明可以一次性完成智能识别、抓捕任务,便于对水下目标进行探测,并引导作业机械臂抓捕福寿螺,有效节约捕捞所需时间,提高捕捞效率,节约人工成本,避免人工捕捞工作对环境破坏。
21、(3)本发明中智能识别系统通过efficientdet目标检测算法、注意力机制算法,利用预先训练好的福寿螺目标检测模型,对水下监控及识别模块传输来的图片或视频进行检测,判断中生物或物体的类别。在智能识别时,采用水下图像增强算法,可增强图片或视频清晰度,从而进行正确决策。
22、本发明的优点和特点,将通过下面优选实施例的非限制性说明进行图示和解释,这些实施例,是参照附图仅作为例子给出的。
技术特征:
1.一种福寿螺水下智能识别及主动抓捕装置,包括舱体(3)、抓捕机械臂(5)以及驱动机构,其特征在于:所述抓捕机械臂(5)设置在舱体(3)行进方向的前端且末端与舱体(3)连接,驱动机构设置在舱体(3)行进方向的后端,所述抓捕机械臂(5)数量为两个,其中一个抓捕机械臂(5)首端设置兜网(6),另一个抓捕机械臂(5)首端设置机械手(7),控制模块(9)设置在抓捕机械臂(5)与舱体(3)连接处,运动机构(10)设置在抓捕机械臂(5)中部;还包括设置在舱体行进方向的前端的万向切割机(4),所述舱体(3)内部设置总控模块(17)、电池模块(18)、舱内容器(12)、第一照明模块(16)、第一监控与识别模块(14)、传感器模块(13)、开合门(8)以及出口(15),所述舱内容器(12)通过两个舱内容器通道(11)分别连接设置在舱体(3)顶部的开合门(8)以及底部的出口(15),在舱体(3)行进方向的前端设置有第二照明模块(20)和第二监控与识别模块(19),总控模块(17)置于舱体(3)内部的底部并控制抓捕装置的所有运动状态,所述电池模块(18)设置在舱体(3)底部并为整个抓捕装置提供电力,第一照明模块(16)设置在舱内容器(12)两侧,第一监控与识别模块(14)和传感器模块(13)设置在舱内容器(12)顶部,舱体(3)行进方向的前端还设置有第二监控与识别模块(19)以及第二照明模块(20)。
2.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述总控模块(17)包括智能识别模块、gps定位模块以及无线收发器,所述智能识别模块通过efficientdet目标检测算法判断生物或物体的类别,并运用水下图像增强算法,对画面进行优化提升。
3.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述电池模块(18)包含四块小型高容量软包电池。
4.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述第一照明模块(16)由八颗led灯组成。
5.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述第一监控与识别模块(14)包含高清摄像头和传输元件,所述传感器模块(13)包括四颗智能传感器。
6.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述第二监控与识别模块(19)由高清摄像头和传输元件组成,设置在舱体(3)行进方向的前端两侧,与第二照明模块(20)集成。
7.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述万向切割机(4)数量为两个,设置在舱体(3)行进方向的前端两侧下方,包含单相串励电动机、减速箱、防护罩和圆锯片。
8.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述出口(15)由开合门(8)和充电口组成。
9.根据权利要求1所述的福寿螺水下智能识别及主动抓捕装置,其特征在于:所述驱动机构包含两个第一螺旋推进器(1)和两个第二螺旋推进器(2),分别嵌入舱体(3)行进方向的中部和后端,所述第一螺旋推进器(1)平行于舱体(3)行进方向布置,第二螺旋推进器(2)垂直于舱体(3)行进方向布置。
10.一种用于如权利要求1至9任一项所述的福寿螺水下智能识别及主动抓捕装置的工作方法,其特征在于,包含如下步骤:
技术总结
本发明提出了一种福寿螺水下智能识别及主动抓捕装置,包括舱体、抓捕机械臂以及驱动机构,抓捕机械臂设置在舱体行进方向的前端且末端与舱体连接,驱动机构设置在舱体行进方向的后端,还包括设置在舱体行进方向的前端的万向切割机,舱体内部设置总控模块、电池模块、舱内容器、第一照明模块、第一监控与识别模块、传感器模块、开合门以及出口,舱内容器通过两个舱内容器通道分别连接设置在舱体顶部的开合门以及底部的出口,舱体行进方向的前端还设置有第二监控与识别模块以及第二照明模块。本发明实现了清理阻挡视野和路径的水草或杂物,在水下自由移动,实现自动观测、智能识别、抓捕和存储于一体,约人工成本,避免人工捕捞工作对环境破坏。
技术研发人员:王伟,杨益玮,卢倩,刘元珍,徐迎春,仇永涛,吴焕岭,陈文杰
受保护的技术使用者:盐城工学院
技术研发日:
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!