一种农业机器人区域对靶施药方法
本发明属于农业机械,具体涉及一种农业机器人区域对靶施药方法,可以实现对农田病虫草害的有效防治。
背景技术:
1、在农业生产中,病虫草害是制约农作物产量和质量的重要因素。通常病虫草害在农田中传播速度较快、范围较大,如过不及时防治,会给农业生产带来极大的损失。当今,比较常见的病虫草害防治措施是在出现灾情的区域喷洒农药。然而,施药设备多采用大面积、连续喷洒农药的方式,这种喷药方式会造成过喷,使大量农药流入环境中造成污染和浪费。近年来,也有人采用精准对靶的施药方式,但是这种方法效率较低。因此,减少农药使用量,节省劳动成本,提高作业效率,对保护生态环境和实际生产作业十分重要。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种农业机器人区域对靶施药方法,以解决现有农田喷药机过度施药和工作效率低的问题。
3、(二)技术方案
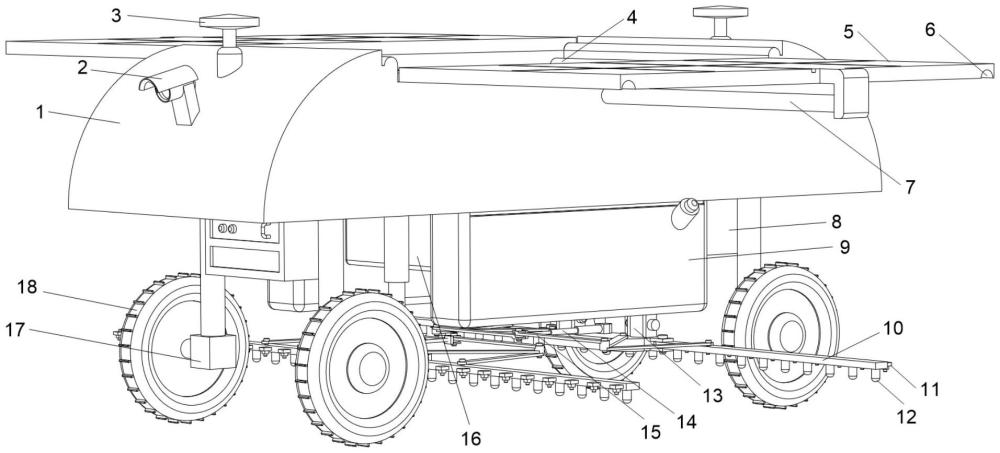
4、为解决上述问题,本发明提供的技术方案如下:一种农业机器人区域对靶施药方法,利用农业机器人区域对靶施药系统,所述系统包括导航系统和施药控制系统;其中,所述导航系统包括导航模块3,用于规划作业起点、终点和行进路线;所述施药控制系统包括储能模块、充能模块、位姿调整与转向模块、检测和喷药模块;所述储能模块包括电池组16,用于为整个系统提供能量;所述充能模块包括太阳能板5、电动推杆7、滑轨4、滑槽6,用于为电池组16充电;所述位姿调整和转向模块包括对行相机2、微控制器、转向电机17、车轮18、位姿传感器,用于控制车体位姿和转向;所述检测和喷药模块包括检测相机11、微处理器、单杆液压缸13、施药架10、二级液压缸14、连杆组15、药箱9、液位监测器、电磁阀12,用于检测田间病虫草害信息并进行喷药防治。
5、所述对行相机2固定安装在机器人前后两端的中间位置,机器人作业时仅有前进方向的对行相机2工作;所述微控制器固定安装在机器人前后两端下方的控制柜8中,机器人作业时仅有前进方向的微控制器工作;所述位姿传感器固定安装在机器人前后两端下方的控制柜8中,机器人作业时仅有前进方向的位姿传感器工作。
6、所述微处理器中部署有病虫草害模型,固定安装在机器人前后两端下方的控制柜8中;所述检测相机11固定安装在施药架10的前端;所述电磁阀12固定安装在施药架10的下方,与检测相机11处于同一竖直面;所述施药架10可通过连杆组15和二级液压缸14折叠,并可利用单杆液压缸13调节高度;所述药箱9固定安装在机器人左右两侧,为机器人两端的喷药装置提供药液;所述液位传感器固定安装在两个药箱9中,距药箱9底部有一定距离;所述药泵固定安装在车体1中。
7、所述方法包括如下步骤:
8、s1、施药准备
9、田间出现病虫草害时,启动区域对靶施药机器人,在导航系统中选择出现灾情的地块及导航路线,将机器人导航至待施药地块的起始位置;
10、s2、施药执行
11、区域对靶施药机器人到达施药位置后,施药控制系统控制太阳能板5、施药架10展开,启动药位监测器和药泵;利用图像处理算法检测对行相机2中的作物行,控制机器人调整好位姿并前进;利用深度学习算法和检测相机11来检测农田中的农作物病虫草害,并控制对应电磁阀12的开闭来喷洒农药;机器人到达地头且剩余药液可满足下一块施药区域时,转向电机17控制车轮18转向换行,使机器人移动至下一块施药区域作业;剩余药液不满足下一块施药区域时,施药控制系统控制关闭药泵、药位监测器,并收起施药架10和太阳能板5;由导航系统将区域对靶施药机器人导航至药液补充位置装填农药,然后返回下一块施药区域继续作业;
12、s3、施药完成
13、在该地块施药完成后,施药控制系统控制关闭药泵、药位监测器,并收起施药架10和太阳能板5,由导航系统将区域对靶施药机器人导航至药液补充位置装填农药,进行下一地块的作业准备。
14、所述步骤s1中,导航系统中存储着区域对靶施药机器人和每个地块的信息,包括机器人在地块中的起始位置、导航路线,机器人的喷药幅宽,地块的长、宽及作物的行间距。
15、所述步骤s2中,利用图像处理算法检测对行相机2拍摄图像中的作物行,并生成导航线,控制机器人前进;在机器人到达地头后,由位姿调整与转向模块控制机器人横向移动实现换行。
16、(三)有益效果
17、本发明提供了一种农业机器人区域对靶施药方法。具备以下有益效果:
18、(1)本发明使用电池组为整个系统供能,并使用太阳能板为系统收集能量,不仅环保,而且在白天光照较好的条件下可以源源不断地为系统提供能量。
19、(2)本发明利用导航系统和位姿调整与转向模块协同完成施药机器人的路线规划,可提高施药机器人的作业效率和精度;采用横向移动实现施药机器人的换行,避免转弯半径过大造成严重的导航和施药误差。
20、(3)本发明利用搭载病虫草害深度学习模型的微处理器对检测相机拍摄的图像进行预测,可快速识别出病虫草害类型,提高检测精度。
21、(4)本发明根据作物行距信息在施药架上设置多个检测相机和电池阀,根据病虫草害的发生区域来控制相应电磁阀的开闭,进行区域对靶施药,可提高施药作业的效率,并有效控制病虫草害的传播。
22、(5)本发明将单杆液压缸、二级液压缸和连杆组进行配合使用,实现对施药架的高度调整和展收,不仅节省施药机器人的存放空间,而且还可以降低外界环境对施药架上敏感设备的影响。
技术特征:
1.一种农业机器人区域对靶施药方法,其特征在于:
2.根据权利要求1所述的农业机器人区域对靶施药方法,其特征在于:步骤s1中,导航系统中存储着区域对靶施药机器人和每个地块的信息,包括机器人在地块中的起始位置、导航路线,机器人的喷药幅宽,地块的长、宽及作物的行间距。
3.根据权利要求1所述的农业机器人区域对靶施药方法,其特征在于:步骤s2中,利用图像处理算法检测对行相机(11)拍摄图像中的作物行,并生成导航线,控制机器人前进;在机器人到达地头后,由位姿调整和转向模块控制机器人横向移动实现换行。
技术总结
本发明涉及一种农业机器人区域对靶施药方法。本发明利用导航系统将机器人导航至待作业农田;施药控制系统控制太阳能板、施药架展开,启动药位监测器和药泵;利用图像处理算法检测对行相机中的作物行,控制机器人前进;利用深度学习算法和检测相机检测农田中的病虫草害,并控制对应电磁阀的开闭来喷洒农药。机器人到达地头且剩余药液可满足下一块施药区域时,转向电机控制车轮转向,使机器人移动至下一块施药区域作业。本块农田施药完成或剩余药液不满足下一块施药区域时,施药控制系统控制关闭药泵、药位检测器,并收起施药架和太阳能板;导航系统将机器人导航至药液补充位置。本发明通过多传感器的融合,实现了田间病虫草害的精准防治。
技术研发人员:袁挺,艾昕旖,韩孝武,罗靖森,熊梓茗,张春龙,张俊雄,张文强,李伟
受保护的技术使用者:中国农业大学
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!