一种多姿态传感器的收获机智能监控系统的制作方法
本发明涉及收获机械位置监测,尤其涉及一种多姿态传感器的收获机智能监控系统。
背景技术:
1、现有的收获机机械大多采用电动卸粮,卸粮筒具备一键展开与一键回位功能,卸粮筒的一键展开是指在软件程序控制下,水平卸粮筒在竖直方向首先到达安全高度以上,然后与电机编码器相连的竖直方向粮筒旋转,到达指定方位角,水平卸粮筒在竖直方向的安全高度即卸粮筒相对车身的夹角要大于安全值可以避免粮筒撞到驾驶室造成损失。
2、卸粮筒一键回位功能其电控逻辑为:控制器接收一键回位指令,先控制卸粮筒上升电磁阀得电使卸粮筒在竖直方向的角度达到软件设定值后,再控制水平旋转电机持续动作到达软件设置的零位停止,最后控制卸粮筒下降电磁阀得电,卸粮筒在重力作用下下降至竖直方向的角度达到标定值,控制器判定卸粮筒回落至支架上。
3、卸粮筒在竖直方向相对车身的俯仰角由弧形传感器提供,卸粮筒在频繁的转动过程中,弧形传感器的检测头容易磨损使输出信号不可靠,且存在非线性误差。
技术实现思路
1、本发明针对现有技术的不足提供一种多姿态传感器的收获机智能监控系统,提高检测卸粮筒相对车身的俯仰角的可靠性及精度,同时监控车身安全。
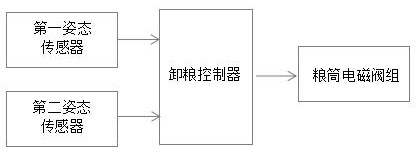
2、具体的,一种多姿态传感器的收获机智能监控系统,包括控制器、至少两个姿态传感器,第一姿态传感器水平安装于卸粮筒上,用于测量卸粮筒的水平仰角α;
3、第二姿态传感器水平安装于车身,用于测量车身在水平方向的仰角β;
4、所述两个姿态传感器与卸粮控制器相连,控制器用于计算卸粮筒相对于车身的仰角θ=α-β,从而判断卸粮筒相对于车身的高度信息,并将控制指令输出至粮筒电磁阀组,控制卸粮筒达到竖直方向的指定高度。
5、所述第二姿态传感器测得的车身仰角β,当车身向水平面以上倾斜时为正角,当车身向水平面以下倾斜时为负角,当车身与水平面平行时为0度角。
6、进一步的,所述第二姿态传感器实时监控车身横滚角γ1,控制器通过can总线获取当前收获机对地行驶速度v1,控制器在判断卸粮筒相对车身高度信息指令电磁阀组动作之前,先判断车身滚向角度γ1与安全车速v0的对应关系,通过控制器预设的车身滚向角度γ1与安全车速v0的对应关系,判断当前车速v1是否在安全车速内,若当前车速超过安全阈值则发送命令至车辆电子控制单元,减小发动机转速,防止车辆倾斜状态下行驶速度过快导致车身侧翻。
7、多姿态传感器收获机智能监控系统在车辆行驶状态时用于监控车辆车身横滚角,通过内置的车身滚向角度γ1与安全车速v0的对应关系来限速,保证车辆安全;在控制器接收到粮筒转出命令时,用于监控卸粮筒相对车身的转出高度信息。
8、所述第二姿态传感器和控制器还可用于监控车身倾斜度从而对履带机高度进行调整,履带机车身倾斜时也可通过监控滚向角γ1判断车身倾斜方向,从而调整履带高度,使车身保持平衡,保证车身安全。
9、进一步的,多姿态传感器的收获机智能监控系统,还包括第三姿态传感器,第三姿态传感器安装于收获机割台,与控制器相连,用于监测收获机割台y轴方向的滚向角γ2,并通过与控制相连的执行机构,调整割台左右两侧的倾斜度,使割台保持水平。
10、进一步的,所述姿态传感器采用工业级mems加速度计和陀螺仪,可测量运动载体的横滚角、俯仰角、偏航角、角速度、加速度,并通过算法保证精度。
11、本发明通过在收获机上设置多个姿态传感器,为现有的卸粮控制器配置控制策略,可提供一整套解决问题的技术方案,通过安装在卸粮筒和车身的姿态传感器,精确测量角度,由控制器计算得出相关数据,实现对卸粮筒高度的精准控制;根据车身姿态传感器、控制器判断车身倾斜度进行限速和/或调整履带高度;另外,增设割台姿态传感器进行割台调平。本发明姿态传感器采用先进的工业级mems加速度计和陀螺仪,配合精准算法,确保数据准确,全方位提升收获机的作业效率和智能化水平。
12、本发明至少具有以下有益效果:
13、1.通过安装在卸粮筒和车身的姿态传感器,精确监测俯仰角,由控制器计算得出相关数据,实现对卸粮筒高度的精准控制。
14、2.通过车身姿态传感器、控制器监测车身倾斜度,用于车速控制和/或履带高度调整。
15、3.通过第三传姿态传感器和控制器,精确检测割台滚向角,控制执行机构动作对割台进行调平。
技术特征:
1.一种多姿态传感器的收获机智能监控系统,其特征在于,包括卸粮控制器、至少两个姿态传感器,第一姿态传感器水平安装于卸粮筒上,用于测量卸粮筒的水平仰角α;
2.根据权利要求1所述的多姿态传感器的收获机智能监控系统,其特征在于,控制器在判断卸粮筒相对车身高度信息指令电磁阀组动作之前,根据获取的第二姿态传感器反馈的车身横滚角γ1,及行驶速度v1,判断当前车速v1是否在安全车速v0内。
3.根据权利要求2所述的多姿态传感器的收获机智能监控系统,其特征在于,若当前车速超过安全阈值则发送命令至车辆电子控制单元,减小发动机转速,防止车身侧翻。
4.根据权利要求1所述的多姿态传感器的收获机智能监控系统,其特征在于,所述第二姿态传感器和控制器可用监控车身倾斜度从而对履带机高度进行调整。
5.根据权利要求1所述的多姿态传感器的收获机智能监控系统,其特征在于,还包括第三姿态传感器,第三姿态传感器安装于收获机割台,与控制器相连,用于监测收获机割台的滚向角γ2,并控制执行机构动作进行割台调平。
6.根据权利要求1至4任一项所述的多姿态传感器的收获机智能监控系统,其特征在于,所述姿态传感器采用工业级mems加速度计和陀螺仪,可测量运动载体的俯仰角、横滚角、偏航角,并通过算法保证精度。
技术总结
一种多姿态传感器的收获机智能监控系统,包括控制器、至少两个姿态传感器,第一姿态传感器水平安装于卸粮筒上,用于测量卸粮筒的水平仰角α;第二姿态传感器水平安装于车身,用于测量车身在水平方向的仰角β;所述两个姿态传感器与卸粮控制器相连,控制器用于计算卸粮筒相对于车身的仰角θ=α‑β,从而判断卸粮筒相对于车身的高度信息,并将控制指令输出至粮筒电磁阀组,控制卸粮筒达到竖直方向的指定高度。控制器在未接收到卸粮筒转出命令时,通过第二姿态传感器和卸粮控制器监控车身的滚向角及车速,保证车辆安全。
技术研发人员:万信超,邓茜茜
受保护的技术使用者:武汉盛硕电子有限公司
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!