一种基于双目视觉自动跟随的蓝莓采摘机
本发明创造属于园艺机械,主要涉及一种基于双目视觉可以自动跟随采摘人员同步行走的蓝莓采摘机械。
背景技术:
1、蓝莓因其独特的营养价值和市场需求而得到广泛种植。但蓝莓果实小而脆弱、成熟期不一致,且种植区域多位于山地和丘陵等复杂地形,使得人工采摘劳动强度大、效率低。目前,使用的蓝莓采摘机械主要分为振动式和抓取式两类。振动式采摘机通过机械振动使果实从植株上脱落,虽然采摘效率较高,但容易造成果实损伤和采后品质下降,且对非成熟果实缺乏选择性,造成非成熟果实的损失;抓取式采摘机则使用机械手或抓具直接采摘果实,虽然在降低损伤率和选择性采摘方面有所提升,但设备复杂,制造成本高,且实际应用中还存在定位精度不足、工作效率不高的局限,推广应用受到限制。
技术实现思路
1、本发明创造的目的就是针对上述现有技术存在的问题,结合当前对蓝莓采摘作业使用的实际需要,研发设计一种基于双目视觉自动跟随的蓝莓采摘机,达到降低采摘作业劳动强度、采摘作业选择性好、效率高、质量好、避免和消除对果实的损伤、减少非成熟果实损失的目的。
2、本发明创造的目的是这样实现的:在履带式自走动力底盘上从前至后依次固装自动控制器、电源、负压风机和果箱,在所述履带式自走动力底盘上、位于果箱上侧部位处固装型支架,三通管和双目相机分别固定配装在型支架上,在三通管内插入固装管状隔网,风机软管的两端分别密封套装在三通管和负压风机上,将三通管与负压风机连通,在所述三通管上、下端部位上分别密封套装输果软管,下端部位的输果软管出果端与果箱连通,在上端部位的输果软管进果端上固装采摘器的漏斗式壳体;所述采摘器的结构是:在所述漏斗式壳体的内部从上至下相互平行且可转动地分别支撑安装上轴和下轴,在所述上轴和下轴上、位于漏斗式壳体内部处分别固装相互配合的上柔性毛刷辊和下柔性毛刷辊,在所述漏斗式壳体下侧外部上通过l型座板依次固装减速器和步进电机,所述步进电机的电机轴与减速器的动力输入轴连接,在所述减速器的动力输出轴上固装驱动圆柱齿轮,在所述上轴和下轴的同一侧外端部上分别固装圆柱齿轮b和圆柱齿轮a,所述圆柱齿轮a分别与驱动圆柱齿轮和圆柱齿轮b啮合,所述上柔性毛刷辊与下柔性毛刷辊旋转方向相反,在所述漏斗式壳体两侧外壁面上分别安装安全护罩和把手,所述安全护罩位于驱动圆柱齿轮、圆柱齿轮a、圆柱齿轮b外侧部将其整体罩盖封闭;电导线将电源通过自动控制器分别与负压风机和步进电机连通,信号线将双目相机与自动控制器和自动控制器与履带式自走动力底盘连通,至此构成一种基于双目视觉自动跟随的蓝莓采摘机。
3、本发明创造基于和采用双目视觉技术,实现了蓝莓采摘机作业时对采摘人员运动的实时跟随,提高了采摘人员采摘效率,同时利用一对旋转方向相反的柔性毛刷辊进行和完成对成熟蓝莓果实的无损伤采摘,并对未成熟蓝莓果实保护性选择,在保证采摘质量和效率的同时,又避免和减少了果实损失,负压风机和输果软管又对采摘果实实现了无损伤气流输送,减少果实损伤,本机结构新颖、独特、合理,造价低廉,使用和作业效果突出。
技术特征:
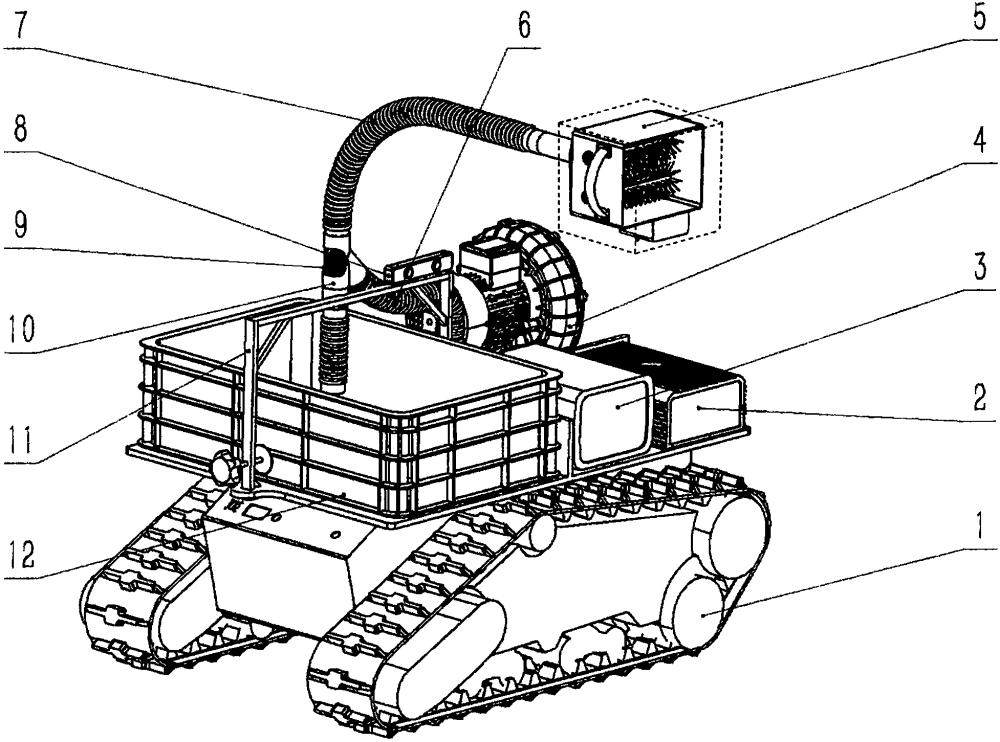
1.一种基于双目视觉自动跟随的蓝莓采摘机,包括履带式自走动力底盘(1),其特征在于:在所述履带式自走动力底盘(1)上从前至后依次固装自动控制器(2)、电源(3)、负压风机(4)和果箱(12),在所述履带式自走动力底盘(1)上、位于果箱(12)上侧部位处固装型支架(11),三通管(10)和双目相机(8)分别固定配装在型支架(11)上,在三通管(10)内插入固装管状隔网(9),风机软管(6)的两端分别密封套装在三通管(10)和负压风机(4)上,将三通管(10)与负压风机(4)连通,在所述三通管(10)上、下端部位上分别密封套装输果软管(7),下端部位的输果软管(7)出果端与果箱(12)连通,在上端部位的输果软管(7)进果端上固装采摘器(5)的漏斗式壳体(5-10);所述采摘器(5)的结构是:在所述漏斗式壳体(5-10)的内部从上至下相互平行且可转动地分别支撑安装上轴(5-13)和下轴(5-5),在所述上轴(5-13)和下轴(5-5)上、位于漏斗式壳体(5-10)内部处分别固装相互配合的上柔性毛刷辊(5-12)和下柔性毛刷辊(5-7),在所述漏斗式壳体(5-10)下侧外部上通过l型座板(5-6)依次固装减速器(5-8)和步进电机(5-9),所述步进电机(5-9)的电机轴与减速器(5-8)的动力输入轴连接,在所述减速器(5-8)的动力输出轴上固装驱动圆柱齿轮(5-4),在所述上轴(5-13)和下轴(5-5)的同一侧外端部上分别固装圆柱齿轮b(5-2)和圆柱齿轮a(5-3),所述圆柱齿轮a(5-3)分别与驱动圆柱齿轮(5-4)和圆柱齿轮b(5-2)啮合,所述上柔性毛刷辊(5-12)与下柔性毛刷辊(5-7)旋转方向相反,在所述漏斗式壳体(5-10)两侧外壁面上分别安装安全护罩(5-1)和把手(5-11),所述安全护罩(5-1)位于驱动圆柱齿轮(5-4)、圆柱齿轮a(5-3)、圆柱齿轮b(5-2)外侧部将其整体罩盖封闭;电导线将电源(3)通过自动控制器(2)分别与负压风机(4)和步进电机(5-9)连通,信号线将双目相机(8)与自动控制器(2)和自动控制器(2)与履带式自走动力底盘(1)连通。
技术总结
一种基于双目视觉自动跟随的蓝莓采摘机属于园艺机械;在履带式自走动力底盘上依次固装自动控制器、电源、负压风机、果箱和形支架,三通管和双目相机固装在形支架上,管状隔网插装在三通管内,风机软管的两端分别套装在三通管和负压风机上,在三通管上、下端上分别套装输果软管,采摘器的漏斗式壳体固装在输果软管的进果端部上,所述采摘器由安全护罩、圆柱齿轮A、B、驱动圆柱齿轮、上、下轴、L型座板、上、下柔性毛刷辊、减速器、步进电机、把手装配构成;本机结构新颖、独特、合理,采摘效率高、质量好,对采摘下来成熟的蓝莓果实无损伤,对未成熟的蓝莓果实具有保护性选择,避免和减少了果实损失。
技术研发人员:徐常塑,陈浪,李云伍,刘俊秀,廖怀毅,付建国
受保护的技术使用者:西南大学
技术研发日:
技术公布日:2024/12/2
- 还没有人留言评论。精彩留言会获得点赞!