一种基于仿生学的剪夹一体式柑橘采收末端执行器
本发明涉及农业采摘机器人领域,具体涉及一种基于仿生学的剪夹一体式柑橘采收末端执行器。
背景技术:
1、农业机械化的普及与智能化技术的应用,已成为解决当前农业生产瓶颈的关键途径。在柑橘智能化采收领域,面临的核心问题是如何在高效低损的前提下,实现树上柑橘的精准采摘。末端执行器作为柑橘智能采收设备中直接与果实接触的关键部件,其性能直接决定了采收的效率和果实损伤率,是提升农业采摘机械化水平的核心环节。
2、现有的柑橘采摘末端执行器通常通过优化果实固定装置来降低采摘过程中对柑橘的损伤,例如通过柔性夹爪或吸盘实现果实的固定与夹持。然而,这些设备往往需要多个动力源,结构复杂,导致末端执行器体积庞大,难以深入枝叶密集的柑橘树中进行高效采摘。由于机械结构复杂,故障率较高,并且对控制系统的要求较为严苛,难以适应大规模果园的实际需求。因此,亟需一种结构简单、体积小巧且高效的末端执行器,以实现柑橘的无损采摘。
3、本发明提出的基于仿生学的剪夹一体式柑橘采收末端执行器,具备简化的结构和小巧的体积,能够实现柑橘的精准无损采摘。其设计不仅有利于设备的精准控制,还能有效推动柑橘果园的大规模推广和应用,助力农业智能化水平的全面提升。
技术实现思路
1、针对上述存在的问题 ,本发明提供了一种基于仿生学的剪夹一体式柑橘采收末端执行器,该装置可实现柑橘果园的高效、低损采摘,便于通过单一动力源舵机实现精准控制,可解决传统柑橘采摘末端执行器体积大、动力源多、结构复杂导致的柑橘采摘率低、故障率高、果实易损伤和大规推广难的问题。
2、本发明所述的一种吸持式柑桔采摘机器人末端执行器的目的和功效,采用如下技术方案实现:
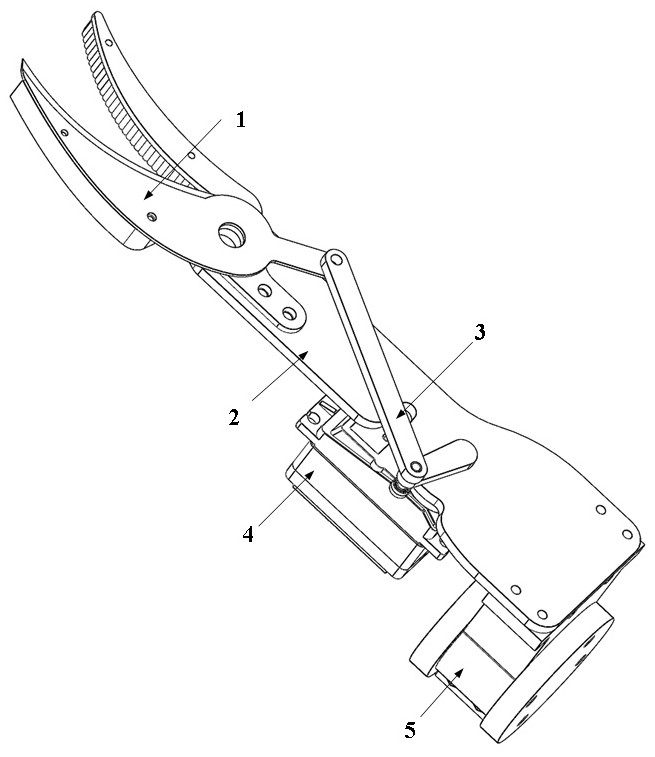
3、一种基于仿生学的剪夹一体式柑橘采收末端执行器,其主要由剪切夹持装置1、连接底座2、传动装置3、舵机4、机械臂连接装置5等组成,具体地,所述剪切夹持装置1包括动剪刀101、定剪刀102、夹持块一103、夹持块二104,所述夹持块一103和夹持块二104分别与动剪刀101和定剪刀102固定在一起,所述传动装置3包括连杆一301、连杆二302、双头螺柱303、舵机法兰304、舵盘305,所述舵机法兰304与舵盘305固定在一起,舵机法兰304与连杆二302通过双头螺柱303连接,连杆一301与连杆二302通过活动旋转连接件连接,所述舵机4与舵盘305连接,所述机械臂连接装置5包括固定支座501、固定端一502和固定端二503,所述连接底座2与剪切夹持装置1、传动装置3、机械臂连接装置5连接在一起,起主要承载作用;
4、机械臂连接装置(5)中的固定端一(502)和固定端二(503)通过螺纹连接,固定支座(501)通过法兰连接方式固定固定端一(502)和固定端二(503),同时固定端一(502)与外界机械臂通过预留螺纹孔实现固定;动力源舵机(4)接收到机械臂信号后,旋转带动舵机法兰(304)、舵盘(305)、连杆二(302)旋转,进而带动连杆一(301)运动,定剪刀(102)在连杆一(301)的带动下围绕转轴作旋转运动,实现果梗剪切动作;果梗剪切过程中,夹持块一(103)和夹持块二(104)在果实正上方通过啮合固定果梗,与夹持块一(103)和夹持块二(104)相固定连接的动剪刀(101)和定剪刀(102)则实现果梗的同步剪切,果梗剪切完毕后,被夹持块一(103)和夹持块二(104)所固定夹持的柑橘果梗在机械臂的动作下移动至一定位置执行末端执行器的张开动作;
5、在末端执行器的张开动作过程中,舵机4接收到机械臂信号后,执行与末端执行器剪切夹持动作相反的复位动作,旋转带动舵机法兰304、舵盘305、连杆二302反向旋转,进而带动连杆一301运动,定剪刀102在连杆一301的带动下围绕转轴作反向旋转运动,进而实现末端执行器的张开动作;所述末端执行器在机械臂信号的驱动下带动舵机4正向和反向旋转,实现剪切夹持与末端执行器张开动作的循环往复;
6、优选地,所述剪切夹持装置中起剪切作用和夹持作用的仿生学设计基于如下考量:
7、如图5(a)所示,所述剪切夹持装置1中动剪刀101剪切刃上的滑切曲线为基于成年面包蟹蟹螯滑切轮廓提取,拟合后的曲线方程为:;夹持块一(103)与夹持块二(104)夹持部分的曲线轮廓基于成年面包蟹蟹螯夹持固定部分的凸起轮廓提取拟合,其拟合后的曲线方程为:, 其中,该椭圆的长轴长度 2a为 30.95 个单位,短轴长度 2b为 28.65 个单位。
8、与现有技术相比,本发明具有如下优点和积极效果:
9、该末端执行器通过仿生学设计的剪夹一体式柑橘采收末端执行器,能够同时实现柑橘果梗的剪切和固定夹持,可通过电机实现对不同类别柑橘果梗剪切夹持的精确控制,避免了末端执行器与柑橘果实的直接接触,实现柑橘的无损采摘。
10、该末端执行器具有结构简单、动力源单一的特点,有效避免了因结构复杂而带来的故障率高,控制难度大的问题。且末端执行器体积小,灵活性好,能够适应复杂果园中的采摘作业。
技术特征:
1.一种基于仿生学的剪夹一体式柑橘采收末端执行器,其特征在于:其主要由剪切夹持装置(1)、连接底座(2)、传动装置(3)、舵机(4)、机械臂连接装置(5)等组成,具体地有:动剪刀(101)、定剪刀(102)、夹持块一(103)、夹持块二(104)、连接底座(2)、连杆一(301)、连杆二(302)、双头螺柱(303)、舵机法兰(304)、舵盘(305)、舵机(4)、固定支座(501)、固定端一(502)、固定端二(503)。
2.根据权利要求1所述的一种基于仿生学的剪夹一体式柑橘采收末端执行器,其特征在于:所述剪切夹持装置(1)包括动剪刀(101)、定剪刀(102)、夹持块一(103)、夹持块二(104),所述夹持块一(103)和夹持块二(104)分别与动剪刀(101)和定剪刀(102)固定在一起,所述传动装置(3)包括连杆一(301)、连杆二(302)、双头螺柱(303)、舵机法兰(304)、舵盘(305),所述舵机法兰(304)与舵盘(305)固定在一起,舵机法兰(304)与连杆二(302)通过双头螺柱(303)连接,连杆一(301)与连杆二(302)通过活动旋转连接件连接,所述舵机(4)与舵盘(305)连接,所述机械臂连接装置(5)包括固定支座(501)、固定端一(502)和固定端二(503),所述连接底座(2)与剪切夹持装置(1)、传动装置(3)、机械臂连接装置(5)连接在一起,起主要承载作用;
3.根据权利要求1所述的一种基于仿生学的剪夹一体式柑橘采收末端执行器,为实现本发明目的而采用的技术方案还包括以下内容:
技术总结
本发明提出了一种基于仿生学的剪夹一体式柑橘采收末端执行器,其结构由基于面包蟹蟹螯仿生学设计的剪切夹持装置、连接底座、传动装置、动力源以及机械臂连接底座装置等组成;剪切夹持装置由动剪刀、定剪刀以及安装于两者上的夹持模块组成,通过剪切刀具与夹持模块的协同动作,实现果梗的固定和剪切同步进行;传动装置采用连杆机构,将动力源输出的扭矩转化为剪切装置的旋转力矩,驱动剪切加持装置执行剪切夹持操作;动力源为舵机,根据不同种类柑橘果梗直径的参数,精确控制舵机的输出角位移,从而驱动剪切夹持机构的精确操作;机械臂连接底座为末端执行器与机械臂之间的标准化连接模块,便于末端执行器安装在机械臂上进行相应的采收作业;连接底座与剪切夹持装置、传动装置、机械臂连接装置连接在一起,起主要承载作用;本发明旨在提供一种结构简单、体积小巧、便于精确控制、且仅需单一动力源驱动的柑橘无损采收末端执行器,以实现其在柑橘果园的大规模生产和应用,提升柑橘采收的效率和质量。
技术研发人员:张云峰,李丽,孙熙良,王俊杰,文杰,李渊明,申颜青
受保护的技术使用者:西南大学
技术研发日:
技术公布日:2025/1/20
- 还没有人留言评论。精彩留言会获得点赞!