爬树修枝机器人
本技术涉及修剪树枝机器人,特别涉及一种爬树修枝机器人。
背景技术:
1、杉树枝条茂密,木材中容易形成较多数量的节子(也就是树干上长出许多细小的枝条),将这些枝条剪断后会在树干上留下一个个结疤,这些节子和结疤会影响杉木木材的质量和价格,杉树越高,人工修枝就越困难,且劳动强度也越大。目前的杉树爬树修枝机器人主要采用履带式上升、无人机飞行、螺旋上升等形式,本申请主要针对螺旋上升式的爬树修枝机器人进行改进。
2、现有的杉树爬树修枝机器人主要存在如下问题:
3、1、与光滑的杆状物相比,杉树的表皮存在大量的树节、树瘤等凹凸不平处,驱动轮在经过这些不平整的表面时,容易导致侧滑现象。侧滑不仅会降低爬升效率,而且在极端情况下,可能导致修枝机侧翻后无法继续爬升现象,从而限制了其工作范围;
4、2、机架同一侧的行走轮位置固定,这意味着当修枝机固定在不同直径的杉树时,可能会出现一个轮子偏离树干的情况,最终导致整机侧翻。这种偏离不仅会降低攀爬能力,还会增加机器的不稳定性,从而进一步影响攀爬效率,在实际修枝作业中,由于杉树的直径有大小头,因此这一问题出现概率可能较高;
5、3、链锯作为选定的修枝机构,在修枝过程中需要尽量贴近树皮,以形成平切的切口,然而,由于链锯存在外壳、挡板等结构的限制,使得链条无法贴近树皮,这可能会影响到修枝的效果和质量;
6、综上,需要对修枝机的结构进行优化改进,以满足实际修枝需要。
技术实现思路
1、本实用新型所要解决的技术问题是:提供一种爬树修枝机器人,通过设置铰链,使爬树机构具有自调节能力,爬树机构能自动调节至四个行走轮均与树干接触的状态,从而能有效防止侧滑和侧翻现象。
2、为了解决上述技术问题,本实用新型采用的技术方案为:
3、一种爬树修枝机器人,包括爬树机构,所述爬树机构包括四个驱动电机、四个行走轮、两根电机固定杆、两根伸缩杆和四个铰链,每个所述驱动电机带动一个所述行走轮转动,所述行走轮倾斜于水平面设置,每两个所述驱动电机固定在一根所述电机固定杆的内侧,两根所述电机固定杆平行设置,两根所述电机固定杆与两根所述伸缩杆组成矩形,相邻的所述电机固定杆与所述伸缩杆之间通过所述铰链连接。
4、进一步的,所述爬树机构还包括电机安装板,所述驱动电机固定在所述电机安装板上,所述电机安装板固定在所述电机固定杆上,所述电机安装板上开设有同心圆周阵列排布的内圈安装孔和外圈安装孔,来调节驱动电机及行走轮安装的角度。
5、进一步的,所述爬树机构还包括竖向固定杆,所述电机安装板固定在所述竖向固定杆上,所述竖向固定杆固定在所述电机固定杆的内侧面上。
6、进一步的,所述伸缩杆包括伸缩内杆和伸缩外杆,所述伸缩内杆滑动穿设在所述伸缩外杆内,所述伸缩内杆和伸缩外杆上开设有多个等距的螺钉安装孔,螺钉穿过所述螺钉安装孔后与螺母螺接。
7、进一步的,还包括防侧翻轮调节机构,所述防侧翻轮调节机构包括两个防侧翻轮和防侧翻轮安装组件,所述防侧翻轮安装在所述防侧翻轮安装组件上,一个所述防侧翻轮安装组件固定在一根所述伸缩杆的内侧面上,所述防侧翻轮倾斜于水平面设置,所述防侧翻轮与水平面之间的夹角和所述行走轮与水平面之间的夹角相等,所述防侧翻轮安装组件还能调节两个防侧翻轮之间的间距。
8、进一步的,所述防侧翻轮安装组件包括u型架,所述u型架的两侧板上开设有垂直于所述伸缩杆的直线槽一,所述防侧翻轮的两端固定在所述u型架的直线槽一内,可在直线槽一内调节防侧翻轮相对于树干中心的距离。
9、进一步的,所述防侧翻轮安装组件还包括开设有圆周阵列排布的转动调节安装孔的安装盘,以及用来固定所述安装盘的固定板,所述固定板固定安装在所述伸缩杆上,所述u型架固定在所述安装盘的转动调节安装孔上,用以调节防侧翻轮的倾斜角度与行走轮的倾斜角度一致。
10、进一步的,所述固定板上开设有平行于所述伸缩杆的直线槽二,所述安装盘通过所述转动调节安装孔与所述直线槽二固定安装。
11、进一步的,还包括电动修枝机构,所述电动修枝机构包括链锯控制组件、链锯导板、链锯以及滚珠组件,所述链锯控制组件安装在一根所述电机固定杆上,所述链锯导板竖直安装在所述链锯控制组件的内侧面上,所述链锯环绕在所述链锯导板的周圈,所述链锯导板上安装有所述滚珠组件,所述滚珠组件的内侧面上球形转动设置一万向滚珠,用以控制链锯和树干之间的距离。
12、进一步的,所述滚珠组件还包括螺柱和固定螺母,所述螺柱穿设在所述链锯上,所述螺柱的两侧各螺接一固定螺母,所述万向滚珠球形转动设置在所述螺柱的内侧端。
13、本实用新型的有益效果在于:在由两根电机固定杆、两根伸缩杆组成的矩形结构的四个连接位置处各设置一个铰链,使修枝机器人在螺旋上升过程中具有自适应调节姿态的能力,即在爬行时如果因电机固定杆和伸缩杆受力不均匀使矩形结构侧斜,有行走轮翘起未与树干接触,此时在四个铰链调节作用下,能使四个行走轮很快调整至与树干接触的位置,从而能有效防止出现侧滑的现象。
技术特征:
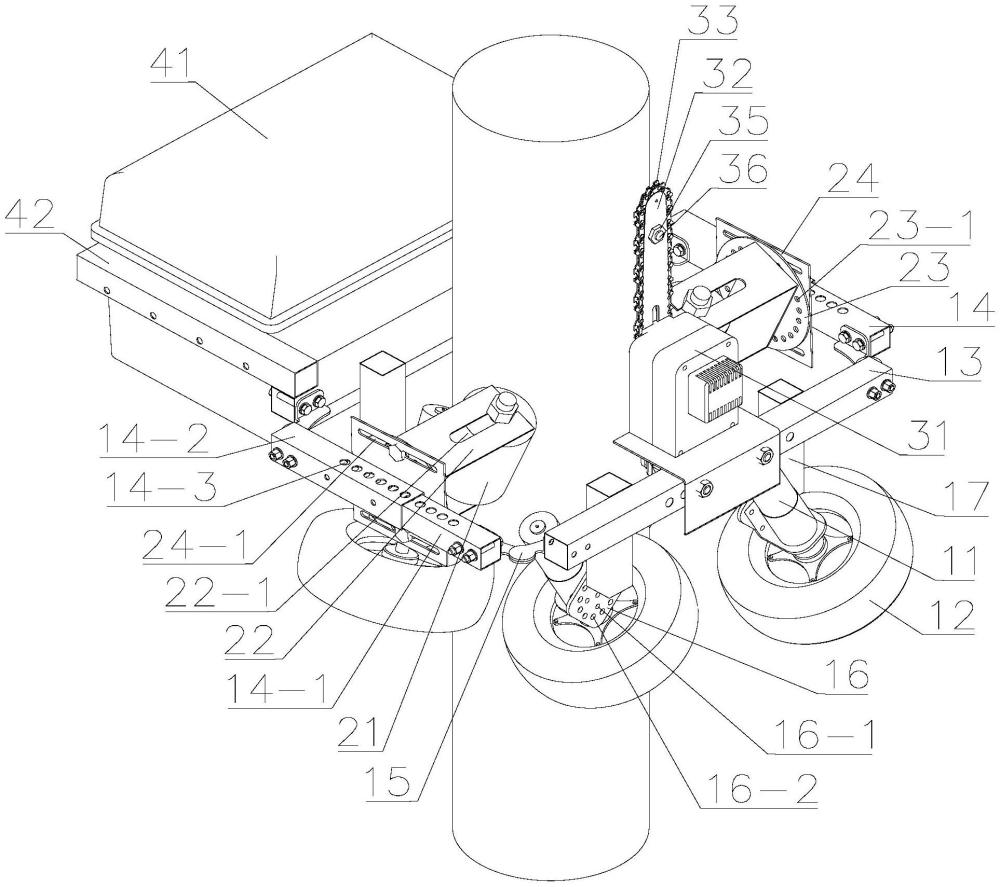
1.一种爬树修枝机器人,其特征在于,包括爬树机构,所述爬树机构包括四个驱动电机(11)、四个行走轮(12)、两根电机固定杆(13)、两根伸缩杆(14)和四个铰链(15),每个所述驱动电机(11)带动一个所述行走轮(12)转动,所述行走轮(12)倾斜于水平面设置,每两个所述驱动电机(11)固定在一根所述电机固定杆(13)的内侧,两根所述电机固定杆(13)平行设置,两根所述电机固定杆(13)与两根所述伸缩杆(14)组成矩形,相邻的所述电机固定杆(13)与所述伸缩杆(14)之间通过所述铰链(15)连接。
2.根据权利要求1所述的爬树修枝机器人,其特征在于,所述爬树机构还包括电机安装板(16),所述驱动电机(11)固定在所述电机安装板(16)上,所述电机安装板(16)固定在所述电机固定杆(13)上,所述电机安装板(16)上开设有同心圆周阵列排布的内圈安装孔(16-1)和外圈安装孔(16-2),来调节驱动电机(11)安装的角度。
3.根据权利要求2所述的爬树修枝机器人,其特征在于,所述爬树机构还包括竖向固定杆(17),所述电机安装板(16)固定在所述竖向固定杆(17)上,所述竖向固定杆(17)固定在所述电机固定杆(13)的内侧面上。
4.根据权利要求1所述的爬树修枝机器人,其特征在于,所述伸缩杆(14)包括伸缩内杆(14-1)和伸缩外杆(14-2),所述伸缩内杆(14-1)滑动穿设在所述伸缩外杆(14-2)内,所述伸缩内杆(14-1)和伸缩外杆(14-2)上开设有多个等距的螺钉安装孔(14-3),螺钉穿过所述螺钉安装孔(14-3)后与螺母螺接。
5.根据权利要求1所述的爬树修枝机器人,其特征在于,还包括防侧翻轮调节机构,所述防侧翻轮调节机构包括两个防侧翻轮(21)和防侧翻轮(21)安装组件,所述防侧翻轮(21)安装在所述防侧翻轮(21)安装组件上,一个所述防侧翻轮(21)安装组件固定在一根所述伸缩杆(14)的内侧面上,所述防侧翻轮(21)倾斜于水平面设置,所述防侧翻轮(21)与水平面之间的夹角和所述行走轮(12)与水平面之间的夹角相等,所述防侧翻轮(21)安装组件还能调节两个防侧翻轮(21)之间的间距。
6.根据权利要求5所述的爬树修枝机器人,其特征在于,所述防侧翻轮(21)安装组件包括u型架(22),所述u型架(22)的两侧板上开设有垂直于所述伸缩杆(14)的直线槽一(22-1),所述防侧翻轮(21)的两端固定在所述u型架(22)的直线槽一(22-1)内。
7.根据权利要求6所述的爬树修枝机器人,其特征在于,所述防侧翻轮(21)安装组件还包括开设有圆周阵列排布的转动调节安装孔(23-1)的安装盘(23),以及用来固定所述安装盘(23)的固定板(24),所述固定板(24)固定安装在所述伸缩杆(14)上,所述u型架(22)固定在所述安装盘(23)的转动调节安装孔(23-1)上。
8.根据权利要求7所述的爬树修枝机器人,其特征在于,所述固定板(24)上开设有平行于所述伸缩杆(14)的直线槽二(24-1),所述安装盘(23)通过所述转动调节安装孔(23-1)与所述直线槽二(24-1)固定安装。
9.根据权利要求1所述的爬树修枝机器人,其特征在于,还包括电动修枝机构,所述电动修枝机构包括链锯控制组件(31)、链锯导板(32)、链锯(33)以及滚珠组件,所述链锯控制组件(31)安装在一根所述电机固定杆(13)上,所述链锯导板(32)竖直安装在所述链锯控制组件(31)的内侧面上,所述链锯(33)环绕在所述链锯导板(32)的周圈,所述链锯导板(32)上安装有所述滚珠组件,所述滚珠组件的内侧面上球形转动设置一万向滚珠(34)。
10.根据权利要求9所述的爬树修枝机器人,其特征在于,所述滚珠组件还包括螺柱(35)和固定螺母(36),所述螺柱(35)穿设在所述链锯(33)上,所述螺柱(35)的两侧各螺接一固定螺母(36),所述万向滚珠(34)球形转动设置在所述螺柱(35)的内侧端。
技术总结
本技术提供了一种爬树修枝机器人,包括爬树机构,所述爬树机构包括四个驱动电机、四个行走轮、两根电机固定杆、两根伸缩杆和四个铰链,每个所述驱动电机带动一个所述行走轮转动,所述行走轮倾斜于水平面设置,每两个所述驱动电机固定在一根所述电机固定杆的内侧,两根所述电机固定杆平行设置,两根所述电机固定杆与两根所述伸缩杆组成矩形,相邻的所述电机固定杆与所述伸缩杆之间通过所述铰链连接。能有效防止修枝过程中出现侧翻的情况。
技术研发人员:许汉良,洪启睿,杜远飞,熊盛佳,吴章云,叶智国,王硕,刘海龙,吴传宇
受保护的技术使用者:福建农林大学
技术研发日:20240618
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!