一种馄饨成型爪的制作方法
1.本实用新型属于食品加工技术领域,具体涉及一种馄饨成型爪。
背景技术:
2.食品工厂制作的速冻馄饨采用机械化加工能够有效提高生产效率,降低制作成本,提高产量。在馄饨的制作工序中,捏合工序直接决定了馄饨的成型形状,因此至关重要。
3.授权公告号为210248150u名称为一种馄饨成型装置的中国专利,以及公开号为cn21381309u名称为一种馄饨捏合装置的中国专利,都记载了一种利用转轴驱动的弧板状成型爪,但是上述成型爪都是以转轴轴心为中心旋转,捏合时,成型爪会对馅皮局部(对应转轴轴心的位置)造成严重拉扯,面皮易破损,不合格产品率高。
4.其次,上述设计捏合处存在机械捏合点,捏合点形成面团,影响美观和口感,公布号为cn113080215a名称为一种元宝馄饨成型方法的中国专利,进行了仿手工程序设计,避免上述缺点,但是需要通过分别驱动成型爪且需要停顿等复杂程序设置,才能实现面皮接口处的层叠捏合,实现相对复杂,维护难度高。
技术实现要素:
5.本实用新型提供一种馄饨成型爪,可以降低因成型爪旋转对局部馅皮的拉扯,降低馅皮破损率,其次便于两成型爪形成层叠配合,降低层叠配合驱动难度,并且保证了馄饨馅皮的折边美感及捏合部位的美感,实现了食品的快速稳定高质量生产。
6.本实用新型的技术方案是:一种馄饨成型爪,设置在驱动转轴上,包括第一成型爪、第二成型爪,所述第一、第二成型爪,包括连接臂,捏合板,捏合板安装在连接臂的下部,所述连接臂上端与驱动转轴固定连接,所述捏合板的垂直投影与驱动转轴的轴线不相交。
7.所述两成型爪的捏合板的垂直投影与对应驱动转轴的轴线距离不相同,以两捏合板端部不发生碰撞为限。
8.所述捏合板与连接臂一体设置。
9.所述捏合板与连接臂固定连接。
10.所述捏合板偏离连接臂轴线安装在连接臂上。
11.所述连接臂偏离转轴轴心位置安装在转轴上。
12.所述第一成型爪的连接臂与捏合板上部之间设置有挡板,挡板弧度对应下侧捏合板弧度。
13.所述第一、第二成型爪捏合初始位置对称或近似对称。
14.所述第一、第二成型爪捏合位置时前端部分重叠。
15.所述捏合板,包括一体设置的主体部和捏合部,主体部和捏合部共同构成弧状捏合板,所述第一、第二成型爪捏合位置时捏合部重叠。
16.所述第一成型爪的捏合部长于第二成型爪的捏合部。
17.所述第一成型爪捏合部的弧度小于第二成型爪捏合部的弧度。
18.所述第一成型爪的捏合板首尾端点的距离大于第二成型爪的捏合板首尾端点的距离。
19.所述捏合部的厚度由上至下递减。
20.本实用新型的成弧形爪具有如下优点,1、将捏合板的垂直投影与对应驱动转轴的轴线不相交设置,优点是安装后,可以有效减少成型爪带动面皮转动过程中成型爪对面皮局部的拉扯,解决传统的安装方式会存在一个对应转轴的扭点,该处面皮极易在成型爪旋转过程中破损的问题,从而提高产品质量;2、还进一步巧妙的利用了前述偏心设置,对左、右成型爪的捏合板垂直投影与对应驱动转轴轴线的距离差别设置,达到了两个成型爪形成交替捏合,且不发生碰撞,这样简化了交替捏合操作,无需进行特别停顿等捏合程序设置,从而简化了设备驱动结构,拓宽了驱动的方式;3、偏心设置达成的捏合操作,还可以保证成型爪在捏合初始位置时保持对称位置或近乎对称的状态,从而保证捏合成型的馄饨翻边保持一致,保证馄饨的美观性。
附图说明
21.图1为本实用新型实施例1的第二成型爪结构示意图。
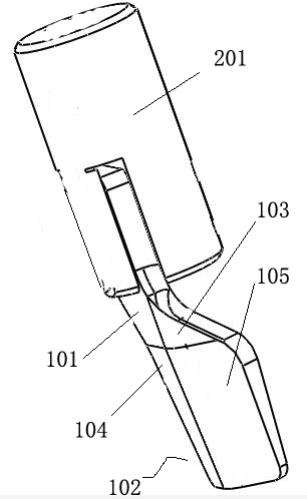
22.图2为本实用新型实施例1的第一成型爪结构示意图。
23.图3为本实用新型实施例1的第一、第二成型爪配合示意图。
24.图4为本实用新型实施例2的成型爪结构示意图。
25.图中,连接臂101,捏合板102,驱动转轴201、挡板103、主体部104、捏合部105。
具体实施方式
26.实施例1
27.如图1-3, 一种馄饨成型爪,设置在驱动转轴上,包括第一成型爪、第二成型爪,第一、第二成型爪捏合初始位置对称或近似对称,第一、第二成型爪,包括连接臂101,捏合板102,捏合板102一体设置在连接臂101的下部(也可以根据实际情况采用固定连接的方式,如螺栓固定等),连接臂上端与驱动转轴201固定连接。
28.捏合板102的厚度由上至下递减,当成型爪提起时,上面厚的部分会留出相对大一些的空间,稍微提起一点高度,成型爪即可和馄饨相分离,保证成型爪顺利抬起,避免发生粘连,提高效率。
29.本实施例中,捏合板102包括一体设置的主体部104和捏合部105,主体部104和捏合部105共同构成弧状捏合板,第一、第二成型爪捏合时捏合部重叠,第一成型爪的捏合部长于第二成型爪的捏合部,第一成型爪捏合部的弧度小于第二成型爪捏合部的弧度,均起到对面皮层叠的优化效果。
30.第一成型爪的捏合板首尾端点的距离大于第二成型爪的捏合板首尾端点的距离,也可以一定程度上辅助调节两抓的捏合配合。
31.第一成型爪的连接臂101与捏合板102上部之间设置有挡板103,挡板103弧度对应下侧捏合板弧度,可以辅助在外侧的第一成型爪带动的面皮未层叠部分贴合馄饨主体,保证捏合效果。
32.所述第一、第二成型爪的连接臂偏离对应转轴轴心位置,设置在转轴上,且偏离距
离不同,这样就促成了捏合板102的垂直投影与驱动转轴201的轴线不相交,同时使两捏合板配合时,不发生碰撞。
33.使用时,第一成型爪、第二成型爪捏合时,两成型爪的弧状板前端部分层叠设置,形成交替捏合,同时为了保证两个成型爪交叠捏合不发生碰撞,成型爪连接臂与驱动转轴轴心的偏离距离不同。
34.工作过程如下:各组成型爪下方对应位置带馅对折的馄饨面皮,成型爪下降压住馄饨,每组两个成型爪的相向转动,将折叠的馄饨皮两端层叠粘接在一起。
35.实施例2
36.本实施例的成型爪结构与实施例1一致,但是捏合板102通过一个连接段偏离连接臂101轴线安装在连接臂101上,此时连接臂101与转轴201的关系更为灵活,可以同轴设置,也可以适量的偏心设置,从而保证了捏合板102的垂直投影与驱动转轴201的轴线不相交。从而达成了本申请对面皮保护及优化层叠实现方式的目的。
37.上面结合附图和实施例对本发明作了详细的说明,但是,所属技术领域的技术人员能够理解,在不脱离本发明宗旨的前提下,还可以对上述实施例中的各个具体参数进行变更,形成多个具体的实施例,均为本发明的常见变化范围,在此不再一一详述。
技术特征:
1.一种馄饨成型爪,设置在驱动转轴上,其特征在于:包括第一成型爪、第二成型爪,所述第一、第二成型爪,包括连接臂,捏合板,捏合板安装在连接臂的下部,所述连接臂上端与驱动转轴固定连接,所述捏合板的垂直投影与驱动转轴的轴线不相交。2.根据权利要求1所述的馄饨成型爪,其特征在于:所述两成型爪的捏合板的垂直投影与对应驱动转轴的轴线距离不相同,以两捏合板端部不发生碰撞为限。3.根据权利要求1所述的馄饨成型爪,其特征在于:所述捏合板与连接臂一体设置。4.根据权利要求1所述的馄饨成型爪,其特征在于:所述捏合板与连接臂固定连接。5.根据权利要求1所述的馄饨成型爪,其特征在于:所述捏合板偏离连接臂轴线安装在连接臂上。6.根据权利要求1所述的馄饨成型爪,其特征在于:所述连接臂偏离转轴轴心位置安装在转轴上。7.根据权利要求1所述的馄饨成型爪,其特征在于:所述第一成型爪的连接臂与捏合板上部之间设置有挡板,挡板弧度对应下侧捏合板弧度。8.根据权利要求1所述的馄饨成型爪,其特征在于:所述第一、第二成型爪捏合初始位置对称或近似对称。9.根据权利要求1所述的馄饨成型爪,其特征在于:所述第一、第二成型爪捏合位置时前端部分重叠。10.根据权利要求1或9所述的馄饨成型爪,其特征在于:所述捏合板,包括一体设置的主体部和捏合部,主体部和捏合部共同构成弧状捏合板,所述第一、第二成型爪捏合位置时捏合部重叠。11.根据权利要求10所述的馄饨成型爪,其特征在于:所述第一成型爪的捏合部长于第二成型爪的捏合部。12.根据权利要求10所述的馄饨成型爪,其特征在于:所述第一成型爪捏合部的弧度小于第二成型爪捏合部的弧度。13.根据权利要求1所述的馄饨成型爪,其特征在于:所述第一成型爪的捏合板首尾端点的距离大于第二成型爪的捏合板首尾端点的距离。14.根据权利要求10所述的馄饨成型爪,其特征在于:所述捏合部的厚度由上至下递减。
技术总结
本实用新型提供一种馄饨成型爪,设置在驱动转轴上,包括第一成型爪、第二成型爪,所述第一、第二成型爪,包括连接臂,捏合板,捏合板安装在连接臂的下部,所述连接臂上端与驱动转轴固定连接,所述捏合板的垂直投影与驱动转轴的轴线不相交。可以降低因成型爪旋转对局部馅皮的拉扯,降低馅皮破损率,其次便于两成型爪形成层叠配合,降低层叠配合驱动难度,并且保证了馄饨馅皮的折边美感及捏合部位的美感,实现了食品的快速稳定高质量生产。了食品的快速稳定高质量生产。了食品的快速稳定高质量生产。
技术研发人员:王卫刚 王鹏 李创业 邢建伟 于波 苏子旭
受保护的技术使用者:郑州思念食品有限公司
技术研发日:2021.11.03
技术公布日:2022/6/17
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1