自动擀面机器人
本发明涉及食品加工,特别是自动擀面机器人。
背景技术:
1、面食是人们日常生活中主要的食物之一,但是面食制作复杂,需要花费大量的人力,并且擀面的技术需要长时间的锻炼,且人工擀面对人力需求较高,且在遇到人流巅峰时期难以保障擀面的效率。
2、现有的手擀面在制作时,基本是通过人工通过擀面杖一下一下的压面团,这样通过一次次压出来的手擀面具有细腻光韧的特点,但是这种口感好的手擀面目前只能通过手工擀出来,无替代和辅助的工具来加快擀面的过程,且现有的部分自动擀面机器自动化程度低,在实际使用的过程中面团容易粘附在擀面杖的表面,且机器无清理擀面杖的功能,不仅限制了擀面机器人的擀面效率,且对面皮的品质难以进行保障。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述和/或现有的食品加工存在的问题,提出了本发明。
3、因此,本发明所要解决的技术问题是现有的部分自动擀面机器自动化程度低,在实际使用的过程中面团容易粘附在擀面杖的表面,且机器无清理擀面杖的功能,不仅限制了擀面机器人的擀面效率,且对面皮品质难以进行保障的问题。
4、为实现上述目的,本发明提供如下技术方案:自动擀面机器人,包括,
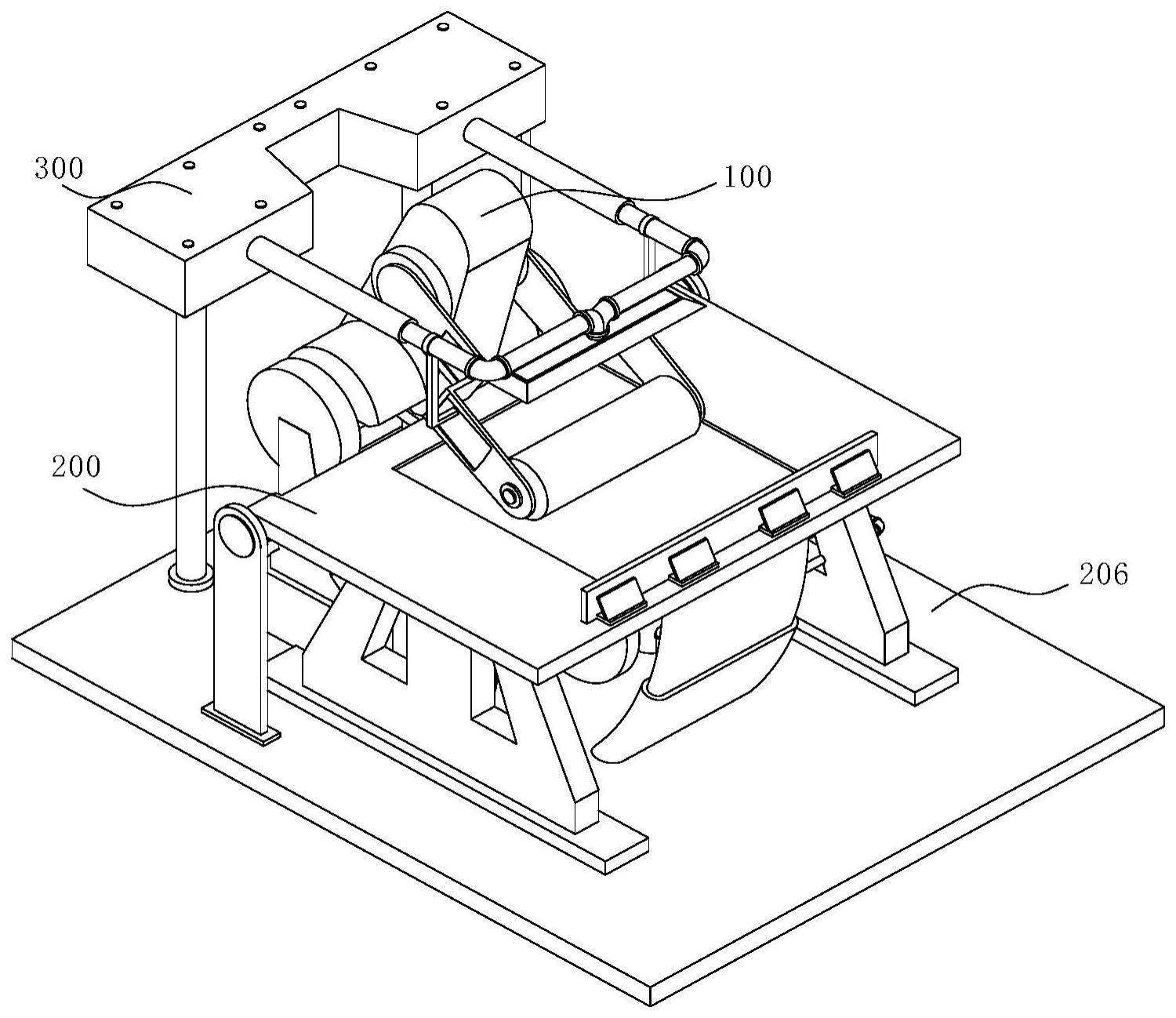
5、擀面机构,包括基座、传动组件、与传动组件连接的传动杆、连接轴和限位杆,其中,传动杆与连接轴固定连接,所述限位杆的数量为两个,所述连接轴卡接在两个限位杆之间;以及,
6、平台机构,包括调节组件、加工台、设置在加工台上的安装槽、挡板和辅助支架,其中调节组件的数量为两个,且两个调节组件分别设置在加工台的两侧;以及,
7、从动机构,包括风机、与风机连接的第一导管、第二导管和第三导管、伸缩板和吸附组件,其中风机通过曝气控制阀与第三导管连通,所述第一导管与伸缩板连接。
8、作为本发明的进一步方案:所述基座的数量为两个,且两个基座的相对面均卡接有传动组件,两个传动组件外套接有同一个传动杆,所述传动杆的另一端与连接轴固定连接,所述连接轴的两端分别两个限位杆相对的一端固定连接,两个限位杆均固定连接在机器人外壳的下方。
9、作为本发明的进一步方案:所述机器人外壳的两侧均卡接有套筒,且两个套筒的另一端均固定连接有支撑腿,所述机器人外壳的两侧均固定连接有机械臂,且两个机械臂相对的一侧设置有同一个擀面杖。
10、作为本发明的进一步方案:所述传动组件包括第一轴承,所述第一轴承内套接有第一转轴,所述第一转轴的另一端与圆盘的圆心固定连接,所述圆盘的另一侧卡接有第二轴承,所述第二轴承内套接有第二转轴;
11、所述传动杆套接在第二转轴外,所述第一轴承卡接在基座的一侧,其中一侧的第一转轴与风机传动连接,另一侧的第一转轴与外置电机传动连接。
12、作为本发明的进一步方案:所述调节组件的数量为两个,且两个调节组件均固定连接在底座上方,两个调节组件与同一个加工台固定连接,所述加工台上开设有安装槽,所述加工台上固定连接有挡板,所述挡板的一侧固定连接有若干个辅助支架,所述辅助支架固定连接在加工台上;
13、所述基座和支撑腿均固定连接在底座上,所述擀面杖搭接在加工台上。
14、作为本发明的进一步方案:所述调节组件包括固定板,所述固定板内固定连接有第三轴承,所述第三轴承内套接有第三转轴,所述第三转轴的另一端与固定筒固定连接;
15、所述固定板固定连接在底座上,所述固定筒的另一端与加工台固定连接。
16、作为本发明的进一步方案:所述风机的出风口与第一导管对应的一端相连通,所述第一导管的另一端与伸缩板相连通,所述伸缩板为弧形伸缩板,所述风机的进风口与第二导管相连通,所述第二导管的另一端与吸附组件相连通;
17、所述伸缩板的底端固定连接在底座上,所述伸缩板的顶端与加工台的下方固定连接,所述吸附组件固定连接在底座的下方。
18、作为本发明的进一步方案:所述风机的另一个出风口通过曝气阀与第三导管相连通,所述第三导管的另一端与存储箱相连通,所述存储箱通过两个活动组件分别与连接管的两端相连通,所述连接管的底端与排料罩相连通;
19、所述存储箱通过支架固定连接在底座上,所述活动组件与机械臂固定连接,所述排料罩位于擀面杖的上方。
20、作为本发明的进一步方案:所述吸附组件包括分接管,所述分接管的另外若干个端口均固定连接有吸附管,所述分接管通过若干个吸附管分别与若干个吸盘相连通;
21、所述吸盘的上方与底座的下方固定连接,所述分接管的另一端与第二导管的底端相连通。
22、作为本发明的进一步方案:所述活动组件包括伸缩管,所述伸缩管外固定连接有固定环,所述固定环的底端固定连接有同步杆;
23、所述伸缩管的一端与存储箱相连通,所述伸缩管的另一端与连接管对应的一端相连通,所述同步杆的底端与机械臂固定连接。
24、与现有技术相比,本发明的有益效果在于:该自动擀面机器人,通过设置风机、曝气阀、存储箱和伸缩管,当曝气阀开启时,大量的气体则会推动存储箱内的面粉沿着伸缩管流动,随后面粉则会喷洒至加工台上方的面团表面,使得该机器人具有间歇性喷洒面粉的效果,避免在加工面团的过程中由于面团粘附在擀面杖的表面,保障了该机器人对面团的加工效率,且该机器人可以面团加工完毕后可以自动化倾斜角度,从而便于面团的取放,使得该机器人可以有效的对面团加工的效率进行保障。
技术特征:
1.自动擀面机器人,其特征在于:包括,
2.如权利要求1所述的自动擀面机器人,其特征在于:所述基座(101)的数量为两个,且两个基座(101)的相对面均卡接有传动组件(102),两个传动组件(102)外套接有同一个传动杆(103),所述传动杆(103)的另一端与连接轴(104)固定连接,所述连接轴(104)的两端分别两个限位杆(105)相对的一端固定连接,两个限位杆(105)均固定连接在机器人外壳(106)的下方。
3.如权利要求2所述的自动擀面机器人,其特征在于:所述机器人外壳(106)的两侧均卡接有套筒(107),且两个套筒(107)的另一端均固定连接有支撑腿(108),所述机器人外壳(106)的两侧均固定连接有机械臂(109),且两个机械臂(109)相对的一侧设置有同一个擀面杖(1010)。
4.如权利要求3所述的自动擀面机器人,其特征在于:所述传动组件(102)包括第一轴承(102a),所述第一轴承(102a)内套接有第一转轴(102b),所述第一转轴(102b)的另一端与圆盘(102c)的圆心固定连接,所述圆盘(102c)的另一侧卡接有第二轴承(102d),所述第二轴承(102d)内套接有第二转轴(102e);
5.如权利要求4所述的自动擀面机器人,其特征在于:所述调节组件(201)的数量为两个,且两个调节组件(201)均固定连接在底座(206)上方,两个调节组件(201)与同一个加工台(202)固定连接,所述加工台(202)上开设有安装槽(203),所述加工台(202)上固定连接有挡板(204),所述挡板(204)的一侧固定连接有若干个辅助支架(205),所述辅助支架(205)固定连接在加工台(202)上;
6.如权利要求5所述的自动擀面机器人,其特征在于:所述调节组件(201)包括固定板(201a),所述固定板(201a)内固定连接有第三轴承(201b),所述第三轴承(201b)内套接有第三转轴(201c),所述第三转轴(201c)的另一端与固定筒(201d)固定连接;
7.如权利要求5所述的自动擀面机器人,其特征在于:所述风机(301)的出风口与第一导管(302)对应的一端相连通,所述第一导管(302)的另一端与伸缩板(303)相连通,所述伸缩板(303)为弧形伸缩板(303),所述风机(301)的进风口与第二导管(304)相连通,所述第二导管(304)的另一端与吸附组件(305)相连通;
8.如权利要求7所述的自动擀面机器人,其特征在于:所述风机(301)的另一个出风口通过曝气阀与第三导管(306)相连通,所述第三导管(306)的另一端与存储箱(307)相连通,所述存储箱(307)通过两个活动组件(308)分别与连接管(309)的两端相连通,所述连接管(309)的底端与排料罩(3010)相连通;
9.如权利要求7所述的自动擀面机器人,其特征在于:所述吸附组件(305)包括分接管(305a),所述分接管(305a)的另外若干个端口均固定连接有吸附管(305b),所述分接管(305a)通过若干个吸附管(305b)分别与若干个吸盘(305c)相连通;
10.如权利要求8所述的自动擀面机器人,其特征在于:所述活动组件(308)包括伸缩管(308a),所述伸缩管(308a)外固定连接有固定环(308b),所述固定环(308b)的底端固定连接有同步杆(308c);
技术总结
本发明公开了自动擀面机器人,属于食品加工技术领域。该自动擀面机器人,通过设置风机、曝气阀、存储箱和伸缩管,当风机运行时,风机则会将部分气体堆积在曝气阀内,且曝气阀间歇开启,当曝气阀开启时,大量的气体则会快速涌入存储箱内,并推动存储箱内的面粉沿着伸缩管流动,随后面粉则会通过连接管和排料罩排放至擀面杖的上方,并喷洒至加工台上方的面团表面,使得该机器人具有间歇性喷洒面粉的效果,避免在加工面团的过程中由于面团粘附在擀面杖的表面,保障了该机器人对面团的加工效率,且可以有效的对面团加工后的质量进行保障,避免在擀面的过程中由于内部机械结构的运行而出现大幅度晃动或倾倒的情况。
技术研发人员:王蔚,叶凡,孟祥堃
受保护的技术使用者:上海杉达学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!