一种蘑菇自动切根装置
本技术涉及一种蘑菇切根装置,其适用于蘑菇的采后自动切根,属于智能制造和农作物机械。
背景技术:
1、随着生活水平的提高,食用菌的需求量越来越大。为了增加蘑菇的产量,蘑菇工厂化栽培已经成为必然趋势。
2、由于区域饮食文化和个人食用菌菇习惯的不同,菌菇采摘后有些需要切除根部再投入市场。传统蘑菇生产者通常采用人工切除蘑菇根部的方式,但是在进行蘑菇切根作业的过程中,因为工作习惯的差异,人工切根容易发生斜切、切根长度不一等问题,导致切根后所保留的蘑菇总长度和切面质量参差不齐,降低蘑菇的美观程度,影响蘑菇品相,降低蘑菇生产者的经济效益。
3、目前针对蘑菇的自动切根装置的研究更多考虑的是蘑菇的切根,并没有考虑输送装置能否适应不同姿态蘑菇的放置问题。如采用孔洞式输送带并结合鼓风组件实现蘑菇传输以及固定的切根机,该切根机采用扁平输送带实现蘑菇的输送,并通过在输送带上打出尺寸一致的圆孔来固定和放置蘑菇;以及采用载物桶的方式实现蘑菇输送以及固定的切根机,该切根机将蘑菇放置在载物桶中并通过链传动带动载物桶运动来实现蘑菇的输送。上述机构均可以实现稳定的切根,但是由于被蘑菇的大小、姿态并不都是统一的,那么蘑菇被机械臂采摘上来的蘑菇的大小和姿态也不统一,以上圆孔式或u型式蘑菇落料放置结构的大小固定不可实时调整,只能对蘑菇大小和倾斜姿态变化在较小变化范围内稍具有一定适应性,但是对于蘑菇大小变化较大或蘑菇被机械臂夹持的倾斜角度较大的情况,容易出现蘑菇无法放入该结构中而滑落到其它地方,从而导致切根失败。因此,是否能够平稳地将这些蘑菇成功放置在输送装置上完成后续的切根动作,是一个需要考虑的新问题。该问题能否被合理解决将影响切根机的效果。
4、因此,有必要提供一种新型的蘑菇自动切根装置,配合蘑菇采摘机器人实现蘑菇的切根以及收集任务。
技术实现思路
1、针对现有技术中自动化采收作业中采摘、切根任务间联系性不强以及蘑菇大小变化较大或蘑菇被机械臂夹持的倾斜角度较大情况下适应性不够的问题,本实用新型提供了一种蘑菇自动切根装置,其能够配合在工厂化蘑菇生产环境中的蘑菇采摘机器人,在采摘完成后进行自动切根和收集,提高了对不同倾斜程度蘑菇切根任务的适用性。
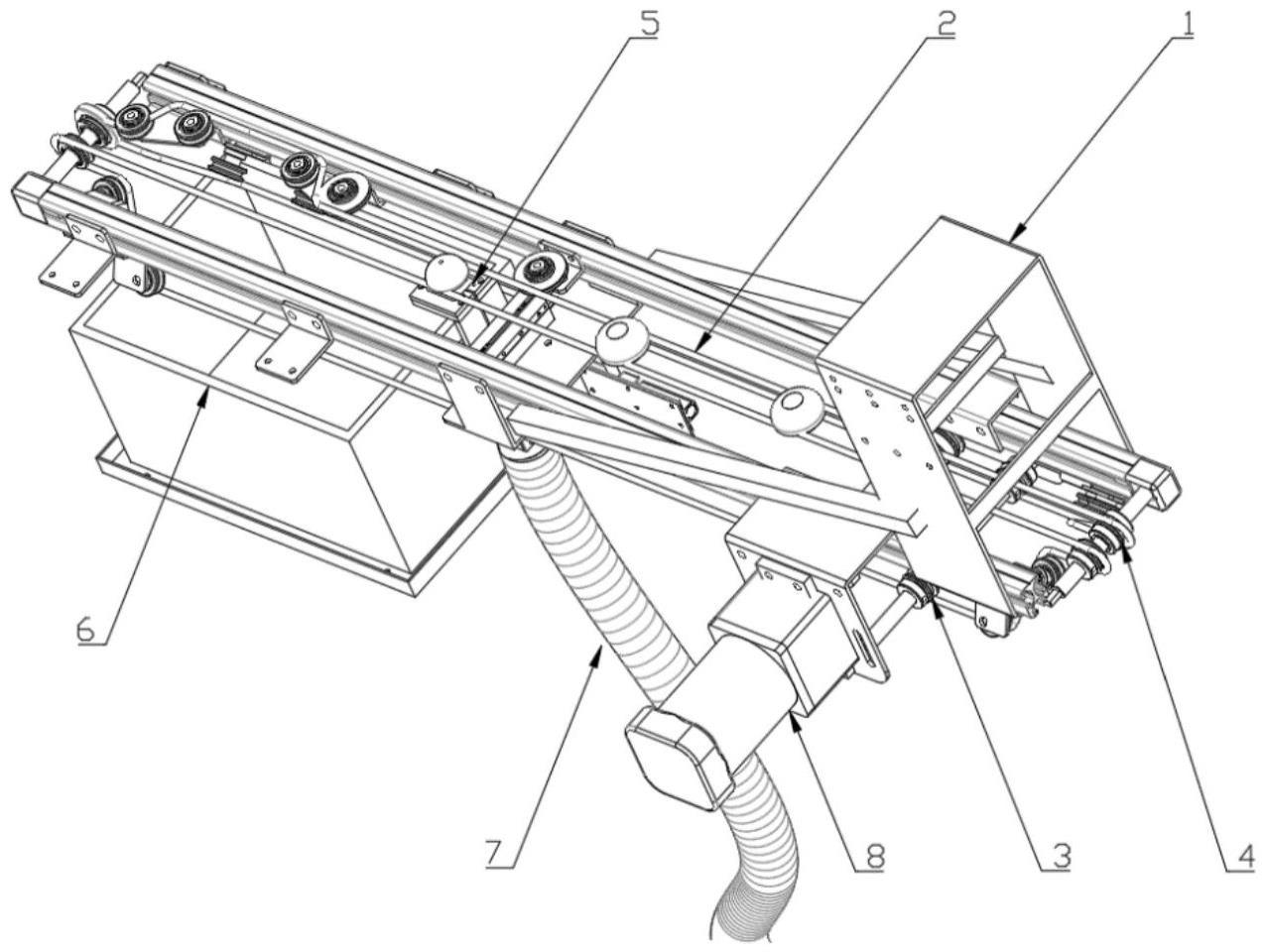
2、本实用新型装置的主要功能是实现蘑菇的自动切根和收集任务,其包括支撑架、输送带、切根器、传动轮、辅助轮、收集篮和根部输送软管;输送带通过辅助轮固定并利用驱动电机驱动传动轮实现运动,两条输送带间距通过辅助轮调整,用于自适应采摘机器人采摘的不同大小、不同倾斜程度蘑菇的落料和输送;切根器通过传感器确定蘑菇是否到达切根位置,控制气动装置驱动切根器对蘑菇进行切根操作;完成切根的蘑菇被输送至收集篮,切除的根部通过根部输送软管输送至相应的收集装置。为了解决以上的技术问题,本实用新型采用如下技术方案。
3、一种蘑菇自动切根装置,其包括支撑架、输送带、传动轮、辅助轮、切根器、收集篮和根部输送软管;其中:
4、支撑架包括两条水平设置的伸出杆,输送带有两条,其包括第一输送带和第二输送带,第一输送带和第二输送带分别沿着伸出杆方向布设在支撑架上;第一输送带和第二输送带间的间距通过辅助轮来实现调整和固定;
5、辅助轮包括设置在伸出杆首端的伸出杆首端辅助轮、设置在伸出杆尾端的伸出杆尾端辅助轮、以及沿着输送方向水平布置在伸出杆首端辅助轮和伸出杆尾端辅助轮之间的用于安装第二输送带的第五间距调整辅助轮、第一间距调整辅助轮、第二间距调整辅助轮、第三间距调整辅助轮和第四间距调整辅助轮;传送轮有两对,其安装在伸出杆首端辅助轮和伸出杆尾端辅助轮之间,驱动电机驱动传动轮带动第一输送带和第二输送带的同步传输运动;
6、伸出杆首端辅助轮和伸出杆尾端辅助轮采用心轴传动,用于固定第一输送带和第二输送带;切根器在第一间距调整辅助轮和第五间距调整辅助轮的中间位置设置,位于两输送带之间,输送带将蘑菇从伸出杆的首端输送至切根器处后,切根器对蘑菇进行切根,切根器下方为根部输送软管;第一间距调整辅助轮、第二间距调整辅助轮、第三间距调整辅助轮和第四间距调整辅助轮安装在靠近伸出杆尾端下方的收集篮处,其使得两输送带在收集篮附近间距增大,使得输送带上的蘑菇经过切根器切根后,输送至此处时菌盖朝上自动落入收集篮。
7、本实用新型中,支撑架采用悬臂结构,支撑架还包括加固支撑架和二力杆;加固支撑架采用“∩”型结构,其靠近伸出杆的首部位置安装在水平设置的伸出杆上,加固支撑架与伸出杆的两侧铰接两个二力杆。
8、本实用新型中,所述输送带采用横截面为圆形的输送圆带。
9、本实用新型中,第一间距调整辅助轮处的第二输送带和第一输送带之间的间距等于第五间距调整辅助轮处的第二输送带和第一输送带之间的间距;第五间距调整辅助轮处的第二输送带和第一输送带之间的间距小于靠近伸出杆首端处的第二输送带和第一输送带之间的间距。
10、本实用新型中,第二间距调整辅助轮、第三间距调整辅助轮处第二输送带和第一输送带之间的间距大于第一间距调整辅助轮处的第二输送带和第一输送带之间的间距。
11、本实用新型中,辅助轮中还包括两对向外倾斜辅助轮,其设置在靠近伸出杆尾端的伸出杆尾端辅助轮处,在支撑架下方呈“八”字分布,以增大第一输送带和第二输送带之间的间距。
12、本实用新型中,切根器通过切根器支架安装在支撑架上,切根器支架上安装有用于确定蘑菇是否到达切根位置的传感器。
13、本实用新型中,切根器包括两个以第一输送带、第二输送带间的中轴线为基准对称布置的刀片,其中一个刀片固定安装在支撑架上,另一个刀片和气动装置相连,由气动装置驱动实现对蘑菇根部的切削动作。
14、和现有技术相比,本实用新型的有益效果在于:
15、本实用新型提供的蘑菇切根装置,将输送带非对称布置,使得输送带在蘑菇落料段间距由宽到窄,有利于不同姿态蘑菇的放置;在切根段间距固定,有利于蘑菇稳定切根;在收集段由窄到宽,有利于蘑菇的高效收集。根据蘑菇菇帽直径大、菇柄直径小的特点,通过两条输送带架住蘑菇菇帽,让菇柄可以保持自然悬垂的状态,可以保持蘑菇的清洁,避免摩擦。该输送装置可以适应不同倾斜姿态蘑菇的成功落料和输送任务,与自动化采摘机器人在执行采摘任务时具有良好的适配性。
16、本实用新型提供的蘑菇切根装置,根据任务阶段的不同,通过调整输送带间的间距,可以在输送带运动的过程中完成输送、切根、收集任务。圆形输送带,柔韧性好,与蘑菇的接触面积也小,可避免在较大倾斜角度蘑菇落料和传输中对蘑菇的损伤。
17、本实用新型提供的蘑菇切根装置,通过一个气动驱动的切根器以及根部输送软管实现蘑菇切根以及根部收集任务,结构简单、效率高。
技术特征:
1.一种蘑菇自动切根装置,其特征在于,其包括支撑架(1)、输送带(2)、传动轮(3)、辅助轮(4)、切根器(5)、收集篮(6)和根部输送软管(7);其中:
2.根据权利要求1所述的蘑菇自动切根装置,其特征在于,支撑架(1)采用悬臂结构,支撑架(1)还包括加固支撑架(101)和二力杆(103);加固支撑架(101)采用“∩”型结构,其靠近伸出杆(102)的首部位置安装在水平设置的伸出杆(102)上,加固支撑架(101)与伸出杆(102)的两侧铰接两个二力杆(103)。
3.根据权利要求1所述的蘑菇自动切根装置,其特征在于,所述输送带(2)采用横截面为圆形的输送圆带。
4.根据权利要求1所述的蘑菇自动切根装置,其特征在于,第一间距调整辅助轮(402)处的第二输送带(202)和第一输送带(201)之间的间距等于第五间距调整辅助轮(408)处的第二输送带(202)和第一输送带(201)之间的间距;第五间距调整辅助轮(408)处的第二输送带(202)和第一输送带(201)之间的间距小于靠近伸出杆(102)首端处的第二输送带(202)和第一输送带(201)之间的间距。
5.根据权利要求1所述的蘑菇自动切根装置,其特征在于,第二间距调整辅助轮(403)、第三间距调整辅助轮(404)处第二输送带(202)和第一输送带(201)之间的间距大于第一间距调整辅助轮(402)处的第二输送带(202)和第一输送带(201)之间的间距。
6.根据权利要求1所述的蘑菇自动切根装置,其特征在于,辅助轮(4)中还包括两对向外倾斜辅助轮(407),其设置在靠近伸出杆(102)尾端的伸出杆尾端辅助轮(406)处,在支撑架(1)下方呈“八”字分布,以增大第一输送带(201)和第二输送带(202)之间的间距。
7.根据权利要求1所述的蘑菇自动切根装置,其特征在于,切根器(5)通过切根器支架安装在支撑架(1)上,切根器支架上安装有用于确定蘑菇是否到达切根位置的传感器。
8.根据权利要求1所述的蘑菇自动切根装置,其特征在于,切根器(5)包括两个以第一输送带(201)、第二输送带(202)间的中轴线为基准对称布置的刀片,其中一个刀片固定安装在支撑架(1)上,另一个刀片和气动装置相连,由气动装置驱动实现对蘑菇根部的切削动作。
技术总结
本技术公开了一种蘑菇自动切根装置,该装置的主要功能是实现蘑菇的自动切根和收集任务,其包括支撑架、输送带、切根器、传动轮、辅助轮、收集篮和根部输送软管;输送带通过辅助轮固定并利用驱动电机驱动传动轮实现运动,两条输送带间距通过辅助轮调整,用于自适应采摘机器人采摘的不同大小、不同倾斜程度蘑菇的落料和输送;切根器通过传感器确定蘑菇是否到达切根位置,控制气动装置驱动切根器对蘑菇进行切根操作;完成切根的蘑菇被输送至收集篮,切除的根部通过根部输送软管输送至相应的收集装置。本技术能够适应采摘机械手采摘上来的具有较大倾斜程度的蘑菇,可配合采摘机器人高效的完成蘑菇的传输、切根和收集。
技术研发人员:杨淑珍,田方龙
受保护的技术使用者:上海第二工业大学
技术研发日:20230116
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!