一种智能骑行头盔的制作方法
本申请涉及光电传感和显示,尤其涉及一种智能骑行头盔。
背景技术:
1、骑行作为广大运动爱好者喜爱的运动方式之一,具有减少个人压力,锻炼肌肉,尤其下肢肌肉群,可增强心肺功能,有效减肥等好处。随着骑行爱好者越来越多,骑行所带来的安全隐患也不可避免。交通事故频发,主要是骑行者对身后的交通情况缺乏预警,相应的,骑行时转身观察也会带来潜在危险。针对这种情形,本发明提出一种可佩戴的智能头盔,结合了全景环带镜头和动态视觉传感器的优势,设计了一种可用于防范骑行事故的视觉辅助设备,使得骑行者可以不用转头就能使实时观测后方来车,可以提升骑行安全性。
2、对于现有的智能骑行头盔及其骑行预警技术,在材质选择,以及佩戴舒适性上已经有很大的改良,以往的智能骑行头盔大多基于传感器与单片机联合使用,利用加速度传感器实现对加速度的预测,结合地磁场传感器等实现直行状态和显示功能。随后也有结合了光学传感技术、重力传感技术、透镜和散光技术融入智能光带,以实现主动预警的功能。
3、但上述方案中仍具有很多弊端,现有智能骑行头盔很少使用视觉方案,功能较为单一,用户体验不佳,实用性不强等问题,对用户骑行过程中安全隐患最大的后来车辆没有很好的解决方案,并且在人机交互方面难以做到实时便利,以往使用最多的语音提示方案无法满足在更为紧急状态下的预警,用户很难及时做出反应与应对措施。
技术实现思路
1、针对现有技术存在的问题,本申请实施例的目的是提供一种智能骑行头盔,结合了全景环带镜头pal和动态视觉传感器dvs,能够实现对周围环境360°的动态感知,全景环带相机实现了对环境360度感知,而与全景环带相机适配的动态视觉传感器dvs使得装置在夜间无需照明也可实现对环境的准确感知。
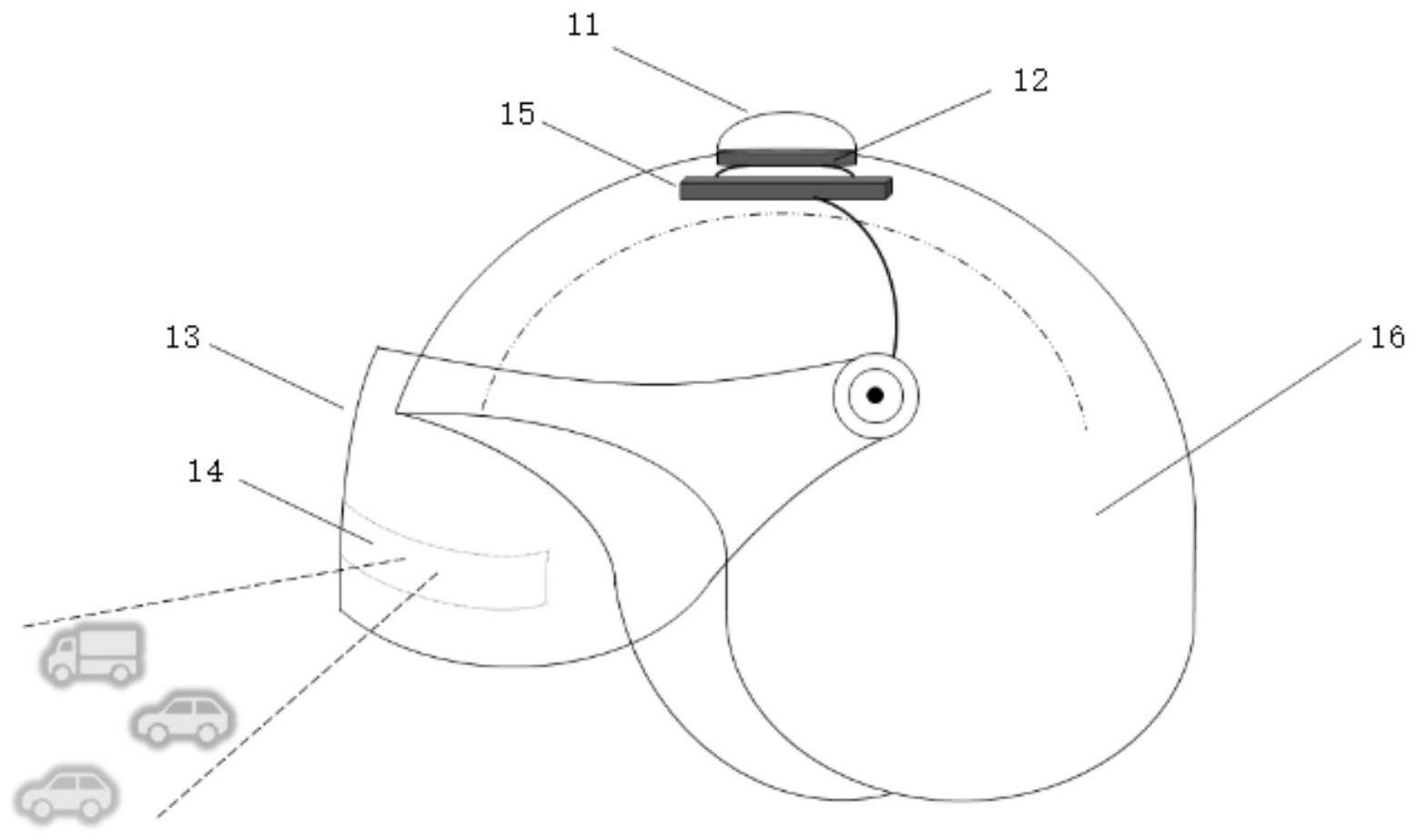
2、本申请实施例提供一种智能骑行头盔,包括全景环带镜头、动态视觉传感器、路况指示器、核心计算处理模块和头盔本体;
3、所述全景环带镜头、动态视觉传感器、路况指示器、核心计算处理模块均设置在所述头盔本体上,所述全景环带镜头用于采集光信号,所述动态视觉传感器用于将所述光信号转化为电信号从而得到全景路况图像的事件流,将所述事件流传输至所述核心计算处理模块中,所述路况指示器上集成有ar显示区,所述核心计算处理模块根据所述事件流对路况进行分析,并将得到的有无快速靠近用户的信号发送到所述ar显示区进行显示。
4、进一步地,在所述全景环带镜头中,环境的光线经过全景环带透镜块状结构的第一个折射面进行折射,在第一反射面和第二反射面上依次反射,再经过第二折射面折射进入中继透镜组,经过中继透镜组聚焦之后,输出所述光信号。
5、进一步地,所述中继透镜组中的透镜数量小于等于3。
6、进一步地,所述全景环带镜头与动态视觉传感器装配在一起固定在所述盔本体顶部。
7、进一步地,在所述ar显示区中,通过全息光学元件与空间光调制器实现可视化,其中空间光调制器发出的光穿过波导,传输至全息光学元件中,从而在全息波导板中产生波导现象,再以一定入射角传播至输出全息光学元件中,再垂直到达人眼。
8、进一步地,在所述核心计算处理模块中:
9、步骤1:将一定时间间隔内的事件流放入事件处理队列当中,其中所述事件处理队列中每个元素为相同时间间隔内事件流;
10、步骤2:将所述事件处理队列中的事件进行去噪处理;
11、步骤3:将去噪后的事件处理队列输入到已训练好的运动分割网络中,得到分割出来的场景中的运动车辆的掩模,根据事件处理队列中前后事件序列获得的掩模的相对位置与大小来预测两侧及后方运动车辆的相对方位与行进情况;
12、步骤4:在事件处理队列非空的情况下重复步骤1~3;
13、步骤5:依据步骤4的输出,发送指令至路况指示器上的ar显示区,以与用户进行视觉交互。
14、进一步地,步骤5中进行视觉交互的方案包括:
15、当车辆以25km/h的速度及以上接近用户时,所述ar显示区显示的对应虚拟车辆为红色边缘;
16、当车辆以15-25km/h的速度接近用户时,所述ar显示区显示的对应虚拟车辆为橙黄色边缘;
17、当车辆以15km/h及以下速度运行时,所述ar显示区显示的对应虚拟车辆为绿色边缘。
18、本申请的实施例提供的技术方案可以包括以下有益效果:
19、由上述实施例可知,本申请采用了全景环带镜头与动态视觉传感器结合的技术手段,克服了以往技术中需要多镜头,甚至无法对后方及两侧完成感知的技术问题,并且对比传统相机的局限性,动态视觉传感器能在光照条件较为恶劣的情况下也能达到良好感知效果,进而发挥了全景环带镜头与动态视觉传感器两者的特点,让其在骑行这一情境下发挥最大的优势。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种智能骑行头盔,其特征在于,包括全景环带镜头、动态视觉传感器、路况指示器、核心计算处理模块和头盔本体;
2.根据权利要求1所述的智能骑行头盔,其特征在于,在所述全景环带镜头中,环境的光线经过全景环带透镜块状结构的第一个折射面进行折射,在第一反射面和第二反射面上依次反射,再经过第二折射面折射进入中继透镜组,经过中继透镜组聚焦之后,输出所述光信号。
3.根据权利要求2所述的智能骑行头盔,其特征在于,所述中继透镜组中的透镜数量小于等于3。
4.根据权利要求1所述的智能骑行头盔,其特征在于,所述全景环带镜头与动态视觉传感器装配在一起固定在所述盔本体顶部。
5.根据权利要求1所述的智能骑行头盔,其特征在于,在所述ar显示区中,通过全息光学元件与空间光调制器实现可视化,其中空间光调制器发出的光穿过波导,传输至全息光学元件中,从而在全息波导板中产生波导现象,再以一定入射角传播至输出全息光学元件中,再垂直到达人眼。
6.根据权利要求1所述的智能骑行头盔,其特征在于,在所述核心计算处理模块中:
7.根据权利要求6所述的智能骑行头盔,其特征在于,步骤5中进行视觉交互的方案包括:
技术总结
本发明公开了一种智能骑行头盔,涉及光电传感和显示技术领域,包括全景环带镜头、动态视觉传感器、路况指示器、核心计算处理模块和头盔本体;全景环带镜头、动态视觉传感器、路况指示器、核心计算处理模块均设置在头盔本体上,全景环带镜头用于采集光信号,动态视觉传感器用于将光信号转化为电信号从而得到全景路况图像的事件流,将事件流传输至核心计算处理模块中,路况指示器上集成有AR显示区,核心计算处理模块根据事件流对路况进行分析,并将得到的有无快速靠近用户的信号发送到所述AR显示区进行显示。实现对周围360°高动态范围的环境感知,使得骑行者在骑行过程中对周围路况的了解程度更清晰,减少了骑行所带来的交通事故隐患。
技术研发人员:张邵波,高少华,邱翌,应王雷,潘嘉仪
受保护的技术使用者:宁波利安科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!