一种基于3D视觉纠偏的鞋底喷胶系统的制作方法
本发明涉及鞋类制造,具体涉及到一种基于3d视觉纠偏的鞋底喷胶系统。
背景技术:
1、随着制鞋业的快速发展,制鞋的企业越来越多。传统制鞋工艺大部分依靠人工,鞋底涂胶在制鞋流程中,需要工人最多,且胶水对工人的身体有害。将机器视觉和机器人技术引入运动鞋自动化生产中具有十分重要的意义。但现有的自动鞋底喷胶系统不能精确的把握喷胶量的多少,导致粘黏时发生溢胶或者脱胶,进而制鞋质量存在偏差。喷胶估计预测轨迹精度不够,导致胶层存在偏差,并且随着个性化需求的增多,鞋类产品更新迭代快,导致鞋型越发复杂多变,现有的喷胶系统大多仅能对设置好的单一鞋型进行喷胶工作,当变换鞋型时需要重新进行参数设置,十分不便。
2、综上所述,如何克服上述缺陷,是本领域技术人员急需解决的问题。
技术实现思路
1、本方案针对上文提到的问题和需求,提出一种基于3d视觉纠偏的鞋底喷胶系统,其由于采取了如下技术方案而能够解决上述技术问题。
2、为实现上述目的,本发明提供如下技术方案:
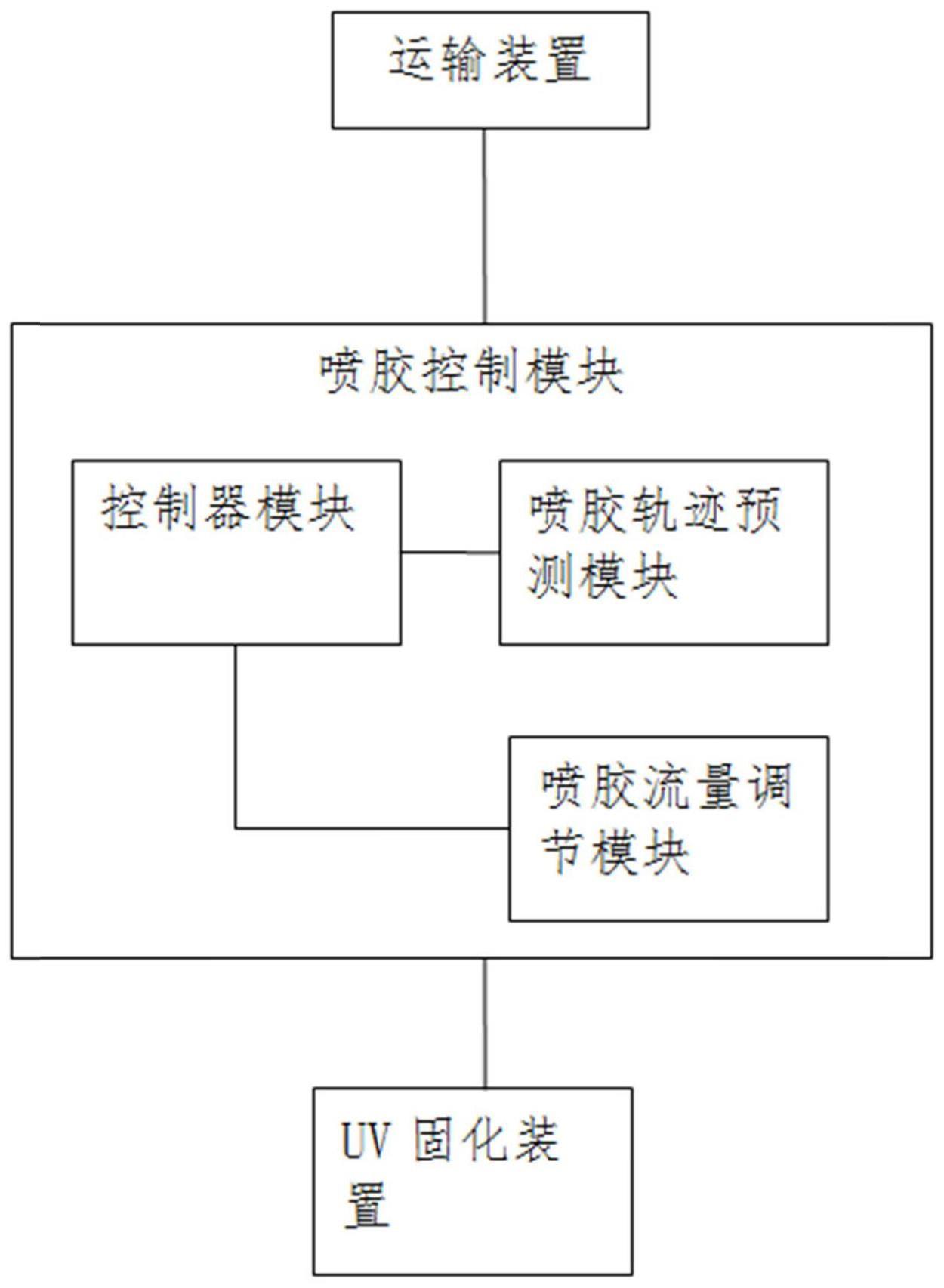
3、该基于3d视觉纠偏的鞋底喷胶系统,包括:运输装置、喷胶控制模块和uv固化装置;
4、所述运输装置用于接收所述喷胶控制模块发送的控制信号,根据控制信号将鞋底和鞋包运输至喷胶工作台的工作区域;
5、所述喷胶控制模块用于接收用户交互信息,控制所述运输装置进行物料运输,并通过3d视觉识别技术识别鞋底和鞋包的位置,根据识别的位置信息规划智能机械臂的运动轨迹,还用于发送固化控制信息至所述uv固化装置;
6、所述uv固化装置与所述喷胶控制模块相连接,所述uv固化装置用于根据固化控制信息对喷胶进行uv固化照射。
7、进一步地,所述运输装置包括用于固定鞋底和鞋包的支撑架、驱动模块和第一plc控制模块;
8、所述支撑架固定在输送带上,输送带上按照均匀间隔设置有支撑架,所述输送带通过所述驱动模块驱动,所述驱动模块包括电动机和减速器,所述电动机和所述减速器相连接,所述电动机的输出轴与驱动轮相连接,所述电动机的输入端与所述第一plc控制模块的输出端电连接,所述第一plc控制模块通过控制所述电动机的启停进而控制支撑架停滞位置。
9、更进一步地,所述喷胶控制模块包括控制器模块、喷胶轨迹预测模块和喷胶流量调节模块;
10、所述控制器模块用于接收用户交互信息和喷胶轨迹预测信息以及流量调节信号,并输出运输信号和固化控制信号,并对喷胶过程数据进行可视化显示;
11、所述喷胶轨迹预测模块与所述控制器模块相连接,所述喷胶轨迹预测模块用于获取鞋底和鞋包的三维扫描图像信息,并根据获取的三维扫描图像信息采用三维配准模型匹配鞋底和鞋包的三维坐标转换信息,并根据转换的三维坐标信息确定喷胶轨迹,并通过示教器控制智能机械臂的位姿运动轨迹;
12、所述喷胶流量调节模块与所述控制器模块相连接,所述喷胶流量调节模块用于根据确定的喷胶轨迹和涂层模型确定喷涂参数,并将所述喷涂参数传输给所述控制器模块,所述控制器模块控制智能机械臂上的喷枪对鞋底和鞋包表面进行喷涂。
13、更进一步地,所述喷胶轨迹预测模块包括图像获取模块和点云数据配准模块;
14、所述图像获取模块与所述控制器模块相连接,所述图像获取模块用于通过高精度激光扫描仪扫描支撑架上的鞋底和鞋包,得到所述鞋底和鞋包的标准离线三维点云数据,并通过单目线结构光三维重建系统在线生成实时鞋底和鞋包的点云数据;
15、所述点云数据配准模块与所述图像获取模块相连接,所述点云数据配准模块用于对获取的点云数据进行滤波处理剔除噪声和离群点,并基于点云配准算法获取所述标准离线三维点云数据和实时点云数据之间的坐标变换矩阵,根据三维配准模型匹配鞋底和鞋包的三维坐标信息,进而规划实时的喷胶轨迹。
16、更进一步地,所述喷胶轨迹预测模块还包括轨迹预测模块,所述轨迹预测模块用于采用轨迹预测算法根据鞋底和鞋包的标准离线三维点云数据确定初始喷涂点和喷涂轨迹,然后通过点云配准的方法,将其映射到实时鞋底和鞋包的点云模型上,可生成最终所需的实时喷胶轨迹,所述轨迹预测算法的过程如下:
17、获取喷胶轨迹的路径点;
18、利用nurbs样条曲线方法进行标准喷胶轨迹的曲线拟合,得到标准鞋底和鞋包的喷胶路径,并根据喷胶工艺采用s型速度规划方法对智能机械臂末端的线速度进行恒定运动约束。
19、更进一步地,所述喷胶流量调节模块包括涂层模型计算模块和参数输出模块;
20、所述涂层模型计算模块用于以涂层的瞬时生长速率模型为基础,以喷涂流量、喷枪速度、喷涂高度、雾化压力及喷幅压力为自变量构建模糊pid喷涂模型;先确定本批次作业喷枪的雾化压力和喷幅压力,并获取喷涂过程中的实时喷枪速度和喷涂高度,所述模糊pid喷涂模型根据涂层的瞬时生长速率预测涂层厚度,采用模糊pid控制方法计算每个点的最优喷涂流量进而调整涂层的喷涂厚度;
21、所述参数输出模块与所述涂层模型计算模块相连接,所述参数输出模块用于获取计算的最优喷涂流量参数,并将最优喷涂流量参数发送至所述控制器模块。
22、进一步地,所述uv固化装置包括计时模块、第二plc控制模块、光源模块和温度检测模块,所述计时模块、所述光源模块和所述温度检测模块均与所述第二plc控制模块相连接;
23、所述计时模块用于记录紫外线对鞋底和鞋包的照射时间,并将每对鞋底和鞋包的照射时间信息发送给所述第二plc控制模块;
24、所述光源模块用于根据所述第二plc控制模块的控制信号发射紫外线;
25、所述温度检测模块用于检测照射环境的温度信息,并将检测的温度信息发送给所述第二plc控制模块。
26、更进一步地,所述uv固化装置还包括降温模块,所述降温模块与所述第二plc控制模块相连接,所述降温模块用于根据所述第二plc控制模块发送的控制信号对照射环境进行降温。
27、从上述的技术方案可以看出,本发明的有益效果是:本发明以基于3d视觉纠偏的鞋底喷胶系统为基础,可快速进行喷涂模型建模,根据不同类型的鞋底和鞋包进行喷涂轨迹规划,适应性高,喷涂效率和喷涂质量高,防止鞋底和鞋包粘黏时发生溢胶或者脱胶情况出现,用户体验度更高,可满足用户的不同穿着需求。
28、除了上面所描述的目的、特征和优点之外,下文中将结合附图对实施本发明的最优实施例进行更详尽的描述,以便能容易地理解本发明的特征和优点。
技术特征:
1.一种基于3d视觉纠偏的鞋底喷胶系统,其特征在于,包括:运输装置、喷胶控制模块和uv固化装置;
2.根据权利要求1所述的基于3d视觉纠偏的鞋底喷胶系统,其特征在于,所述运输装置包括用于固定鞋底和鞋包的支撑架、驱动模块和第一plc控制模块;
3.根据权利要求2所述的基于3d视觉纠偏的鞋底喷胶系统,其特征在于,所述喷胶控制模块包括控制器模块、喷胶轨迹预测模块和喷胶流量调节模块;
4.根据权利要求3所述的基于3d视觉纠偏的鞋底喷胶系统,其特征在于,所述喷胶轨迹预测模块包括图像获取模块和点云数据配准模块;
5.根据权利要求4所述的基于3d视觉纠偏的鞋底喷胶系统,其特征在于,所述喷胶轨迹预测模块还包括轨迹预测模块,所述轨迹预测模块用于采用轨迹预测算法根据鞋底和鞋包的标准离线三维点云数据确定初始喷涂点和喷涂轨迹,然后通过点云配准的方法,将其映射到实时鞋底和鞋包的点云模型上,可生成最终所需的实时喷胶轨迹,所述轨迹预测算法的过程如下:
6.根据权利要求5所述的基于3d视觉纠偏的鞋底喷胶系统,其特征在于,所述喷胶流量调节模块包括涂层模型计算模块和参数输出模块;
7.根据权利要求1所述的基于3d视觉纠偏的鞋底喷胶系统,其特征在于,所述uv固化装置包括计时模块、第二plc控制模块、光源模块和温度检测模块,所述计时模块、所述光源模块和所述温度检测模块均与所述第二plc控制模块相连接;
8.根据权利要求5所述的基于3d视觉纠偏的鞋底喷胶系统,其特征在于,所述uv固化装置还包括降温模块,所述降温模块与所述第二plc控制模块相连接,所述降温模块用于根据所述第二plc控制模块发送的控制信号对照射环境进行降温。
技术总结
本发明提供了一种基于3D视觉纠偏的鞋底喷胶系统,涉及鞋类制造技术领域,包括:运输装置、喷胶控制模块和UV固化装置;所述运输装置用于接收所述喷胶控制模块发送的控制信号,根据控制信号将鞋底和鞋包运输至喷胶工作台的工作区域;所述喷胶控制模块用于接收用户交互信息,控制所述运输装置进行物料运输,并通过3D视觉识别技术识别鞋底和鞋包的位置,根据识别的位置信息规划智能机械臂的运动轨迹,还用于发送固化控制信息至所述UV固化装置;所述UV固化装置用于根据固化控制信息对喷胶进行UV固化照射,本发明可快速进行喷涂模型建模,根据不同的鞋底和鞋包进行喷涂轨迹规划,适应性高,喷涂效率和喷涂质量高。
技术研发人员:潘少宝,郭佳俊
受保护的技术使用者:浙江星链数据科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!